





A Connected ADAS and AD Workflow: No Longer a Dream
Leading industry experts share their insights and perspectives on the advanced driver assistance systems/autonomous driving (ADAS/AD) validation workflow.


The NI toolchain and systems quickly adapt to and future-proof your validation process. We connect you with subject matter experts, ideas, and technology in testing, simulation, cloud computing, IT infrastructure, and more to create solutions that meet and exceed quality standards within the disruptive active safety domain. By combining our strengths with those of trusted third-party experts, we work with you to build a connected ADAS and AD validation workflow to get your vehicles to market faster.
ADAS and AD validation workflows often consist of many disparate pieces. Seamlessly connecting solutions leads to a streamlined workflow that increases coverage, accelerates development, and improves quality.
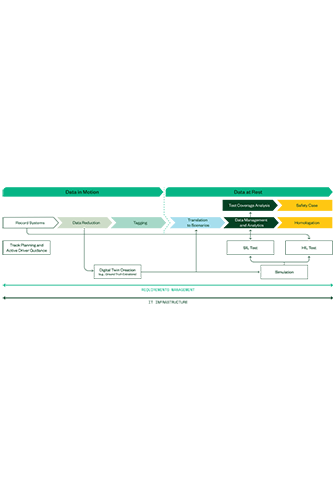
At NI, we help you achieve a connected workflow built on our open system architecture. This includes industry standards like PXI, providing compact, modular, and flexible instrumentation-grade I/O and nanosecond-level timing and synchronization for cutting-edge measurement quality and performance. Our open software-centric approach enables interfaces and connectivity to third-party simulation tool providers, IT infrastructure, and cloud services, giving you the freedom to choose from the best to reach your solution faster. Through the NI ADAS and AD ecosystem, you can collaborate with experts to fully empower your connected ADAS and AD validation workflow, covering data record, data replay, digital twins, software in the loop, HIL, sensor fusion, and other XIL or V&V applications.

Diego Carvalho, lead software tool engineer at Valeo, explains how NI is helping Valeo with reusable, flexible, and scalable solutions that are customized to meet evolving needs, saving test engineers time, and getting autonomous vehicles to market faster.
Using the same data and common hardware and software platforms for ADAS and AD data logging, SIL, HIL, and VIL increases our V&V testing to be more robust, efficient, and deliver better quality. We adjust tools to our process, not the opposite!
Assisted and AD V&V, Senior Technical Specialist
Jaguar Land Rover
Need assistance getting started, with system integration, or finding turnkey test solutions? NI Partners help meet your time-to-market goals faster. This global network includes subject matter experts with years of experience and key technology advantages to accelerate your path to Vision Zero.

Konrad Technologies is NI’s strategic global partner for developing, integrating and delivering ADAS and AD validation test solutions, including data record, data replay, HIL, sensor fusion, and other XIL-type applications.
An NI Partner is a business entity independent from NI and has no agency, partnership, or joint-venture relationship with NI.

