Explore Multisim™ for Designers Features
Multisim™ software combines SPICE simulation and circuit design into an environment optimized to simplify common design tasks, which helps you improve performance, minimize errors, and shorten time to prototype. With a library of 55,000 manufacturer-verified components and seamless integration with the Ultiboard™1 PCB layout tools, you can confidently iterate through design decisions and annotate changes between layout and circuit schematic. Use Multisim™ with Ultiboard™ software to rapidly prototype, build interfacing circuitry, and troubleshoot electronic systems.
What Can You Do With Multisim™ for Designers?
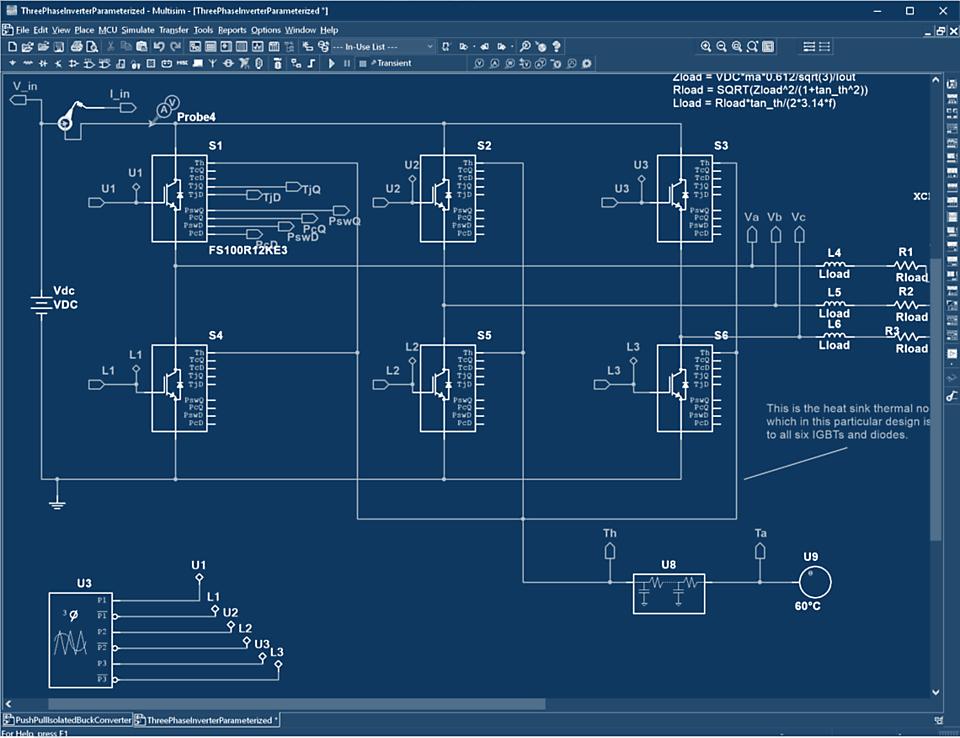
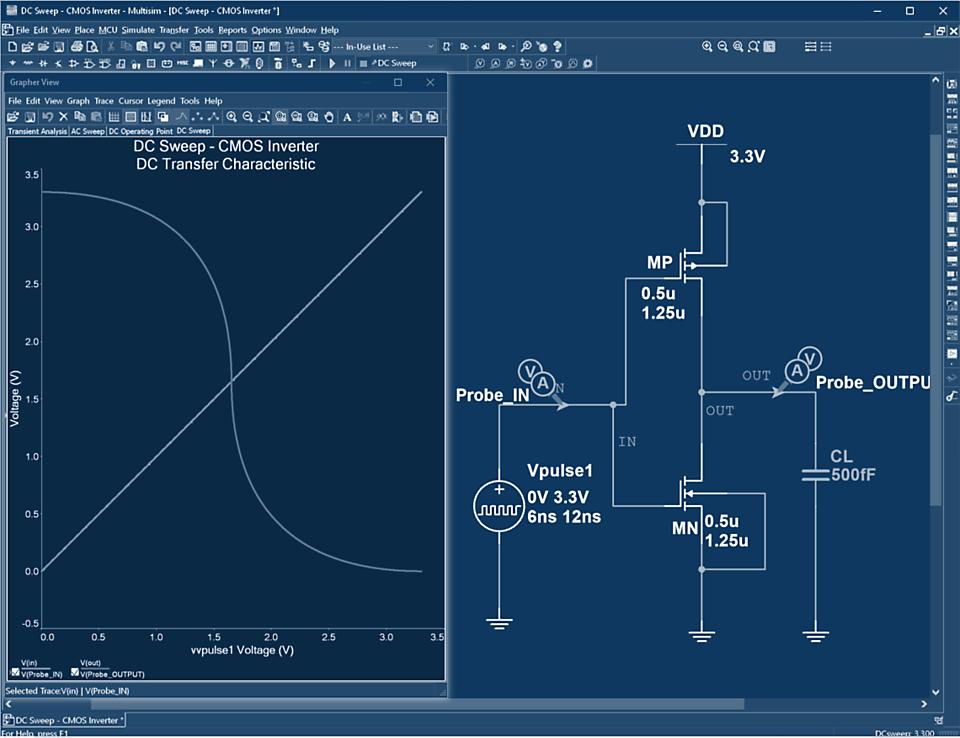
Multisim™ provides 20 advanced analyses, so you can more easily identify limits and design inefficiencies early to reduce costly PCB prototype iterations.
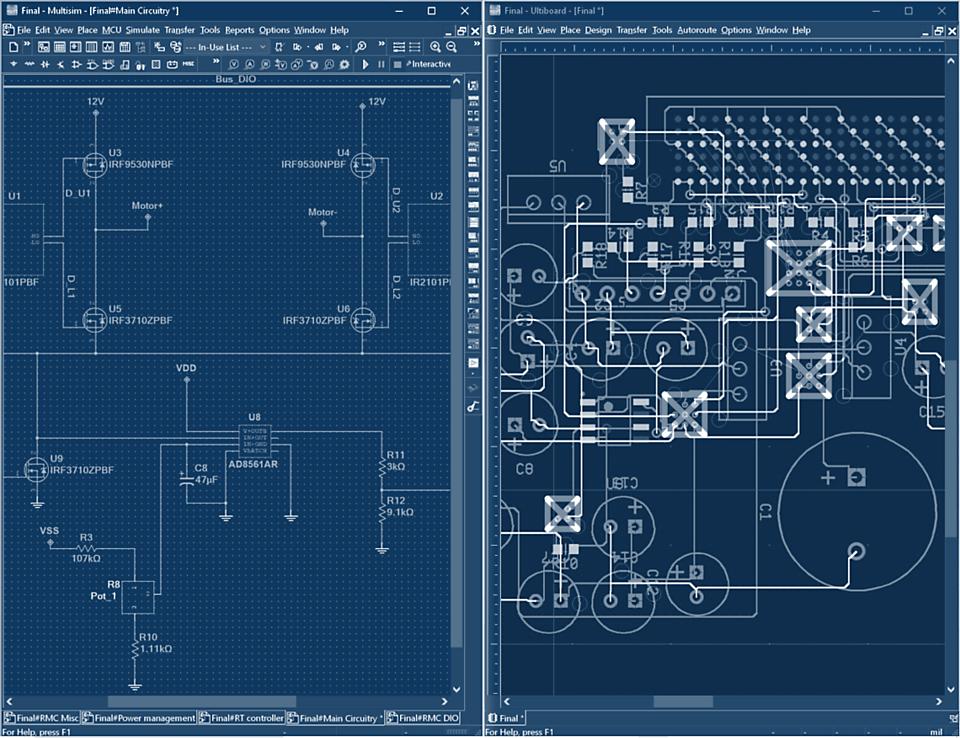
When integrated with Ultiboard™ software, Multisim™ allows you to seamlessly move from design to layout and accelerates your PCB prototype development.
Which Edition Is Right for Your Project?
Multisim™ for Designers Base Edition
- Recommended for basic circuit design
- Includes 47,000+ manufacturer-verified components and models
- Includes Multisim Live™ Premium access (with active SSP)
- Integrates with Ultiboard™ software for rapid PCB prototyping
Multisim™ for Designers Full Edition
- Recommended for standard circuit design
- Includes 49,000+ manufacturer-verified components and models, 17 analyses, and expressions in analyses
- Includes Multisim™ Base functionality
Multisim™ for Designers Power Pro Edition
- Recommended for advanced research and circuit design
- Includes 55,000+ manufacturer-verified components and models and 20 analyses
- Includes Multisim™ Full functionality
Multisim Live™ delivers SPICE simulation to you anywhere, anytime. Learn electronics with an interactive, online, touch-optimized environment that works on any device. With a database of over 30,000 community circuits, you can immediately turn inspiration into simulation. Try it now for free!
Software License Options and Services
Software is available in both subscription and perpetual license terms. An NI software service agreement is included with active subscription licenses. For perpetual licenses, an NI software service agreement is included for one year, and after the first year, software service is renewable on an annual basis.
License Programs
NI software is available to purchase for individuals as a single-seat license, for teams or sites as a volume license, or for entire organizations with an enterprise agreement.
Licensing Terms
Subscription licenses give you access to software on an annual basis, while perpetual licenses provide lifetime usage of the software.
Software Services
Included Benefits
Included Benefits
Get the latest features as soon as they’re released with access to new versions
Have your system up and running faster with troubleshooting help from NI experts
Learn the skills you need for success with 24/7 access to select online training and virtual demonstrations
Maintain your long-standing systems with access to previous versions of NI software
Start Free Trial
1 Ultiboard™ is printed circuit board design and layout software that integrates seamlessly with Multisim™ to accelerate PCB prototype development. You must purchase Ultiboard™ software separately.