Global Synchronization and Clock Disciplining with NI USRP Software Defined Radios
Overview
The USRP Software Defined Radio (SDR) Devices with integrated GPS-disciplined oven controlled crystal oscillator (OCXO) reference clock provide many advantages that improve system performance, accelerate wireless prototyping, and add the capability of global synchronization. This white paper covers the benefits of having the integrated GPS-disciplined clock for different wireless communications applications.
Contents
- Overview of USRP Hardware
- Frequency Accuracy, Stability and Phase Noise Defined
- GPS-Disciplined Clock
- Synchronization with GPS Disciplined Oscillators on NI USRP-293x
- GPSDO-Enabled Hardware Extends Research Capabilities
- NI-USRP Driver for LabVIEW
- GPS Receiver Specifications
- Next Steps
Overview of USRP Hardware
The USRP software defined radios are RF software-programmable radio transceivers designed for wireless communications research. When the USRP is connected to a host PC, it acts as a software-defined radio with host-based digital signal processing capabilities. As shown in Figure 1, there are two independent transmit and receive signal chains which make them capable of performing full duplex applications. Both transmitter and receiver paths have a homodyne or zero IF (ZIF) architecture.
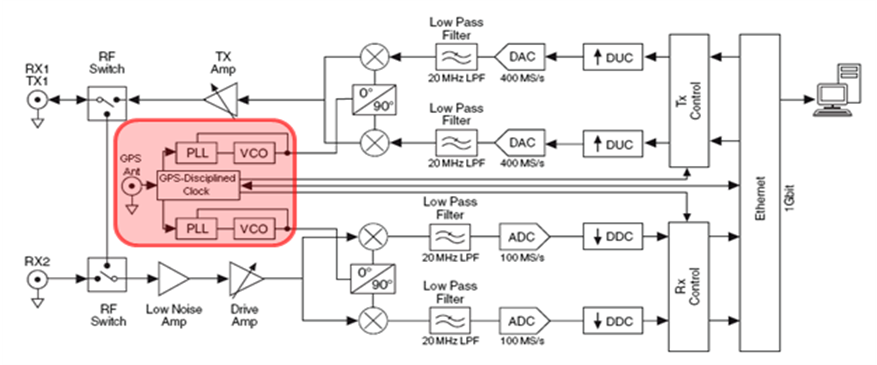
Figure 1 System Block Diagram for NI USRP-293x
When the USRP is transmitting, the host computer synthesizes baseband IQ signals and passes the resulting I and Q signal samples to the USRP at 25 MS/s in 16-bit mode and 50 MS/s in 8-bit mode over the Gigabit Ethernet link. The USRP hardware OSP interpolates and up-converts the synthesized signals to 400 MS/s using a digital up conversion process, and uses the CORDIC algorithm to apply minor frequency offset corrections to achieve the requested RF center frequency. The signal is then converted to analog with the dual-channel, 16-bit, 400 MS/s DAC. The resulting analog signal is then filtered and modulated at the specified RF frequency using direct up-conversion . An adjustable (0-30dB) gain stage amplifies the signal for transmission through the external TX 1 port.
Incoming analog RF signals can enter through either RX 1 or RX 2 connector, depending on which pass is selected by the programmable switch. After an adjustable (0dB-30dB) gain stage, the signal is down-converted to baseband IQ through one mixing stage. A 2-channel, 100MS/s, and 14-bit ADC filters and samples the baseband I and Q analog signals. The digitized I and Q data flow through parallel onboard signal processing (OSP) processes that applies DC offset correction and digital down conversion using the CORDIC algorithm. The algorithm also corrects minor frequency offsets to achieve the desired RF center frequency then applies filtering and decimation to the 100 MS/sec input signal to the user-specified IQ rate. The down converted samples are then passed to the host computer at a baseband I/Q Rate of up to 25 MS/s in 16-bit mode and 50 MS/s in 8-bit mode over the standard Gigabit Ethernet connection to the host computer for processing.
The highlighted section in Figure 1 represents the GPS disciplined clock 10MHz OCXO reference clock. The GPS-disciplined reference clock provides improved frequency accuracy, synchronization capabilities, and GPS position information. The reference clock is shared among both the transmit and receive paths from which the local oscillators (LO) are derived.
Frequency Accuracy, Stability and Phase Noise Defined
Software defined radio with ZIF architectures commonly use a lower frequency (10 MHz) precision reference from which a tunable local oscillator (LO) can be derived for the direct down conversion process. Accuracy and stability of that reference can have big impact on the receiver’s ability to recover the transmitted signal. Accuracy or stability errors in the reference can be magnified in the derived LO.
Frequency accuracy is the degree of conformity of a measured or calculated frequency to an ideal or specified reference. The difference between the measured frequency and the specified (desired) frequency is known as the frequency offset. The concept of stability illustrated in Figure 2 shows how the frequency changes over time.
Figure 2 Frequency vs Time (Courtesy of NIST)
Frequency stability breaks down into three categories: long term stability, which is usually measured over periods of hours, days or more; short term stability, which is usually measured over periods of fractional seconds to one day; and phase noise, which deals with very short time scales and produces effects that look more like unwanted modulation changing the shape of the waveform rather than a wandering frequency.
Long term stability is dominated by a progressive change in frequency, called drift, that all oscillators undergo. Aging is often used synonymously with drift, but technically drift doesn't have to arise from an aging process. Drift often proceeds in one direction and may be predictable based on past performance, at least for a few days. In some oscillators drift may be more random and can change direction. Long-term drift will affect the accuracy of the oscillator's frequency unless it is corrected for.
Short term stability resembles noise and is not normally predictable. It reflects the uncertainty of the oscillator's frequency at a given instant in time. Phase noise is usually thought of in the frequency, rather than the time, domain. Like short term stability, it results from the inherent noise in any component that contains moving atoms (i.e., everything that's not either a total vacuum, or at absolute zero temperature).
Some oscillators are also specified for stability over variables other than time, such as temperature, power supply voltage, shock, and even gravitational effects.
GPS-Disciplined Clock
The United States Global Positioning System (GPS) is well known for its consumer applications of helping drivers navigate the country side. The underlying technology uses a network of satellites precisely timed by a ground network of high precision Rubudium based Atomic Clocks. Through time based triangulation of RF signals, the GPS is able to derive both a highly accurate time (within 50uS) and position (within 6-10 meters). In this way, GPS transfers the precise timing capabilities of the Atomic Clock ground stations to relatively low-cost device that can then be used to improve accuracy and stability of a software defined radio application.
GPS receivers designed for timing purposes output a pulse-per-second (PPS) signal that is accurate on the scale of nanoseconds. The GPS signal is controlled by the US Naval Observatory, so it can be received with an accuracy of a few parts in 10-13. That PPS signal can be used to steer, or discipline, an oven controlled crystal oscillator (OCXO) in a phase lock loop (PLL) configuration. Essentially, a PPS signal derived from the OCXO is compared to the GPS PPS, and a control circuit adjusts the oscillator frequency to keep the two PPS signals at the same time offset, or phase.
The GPS PPS signal in the short term (less than a thousand seconds) is quite noisy. Various factors cause it to bounce around by perhaps 50 to 150 nanoseconds. That doesn't sound like much, but in fractional frequency terms, it's not so great—even 100 nanoseconds per second is only 1x10-8. Over time this noise averages out to zero, so day-over-day the GPS PPS is several orders of magnitude better.
On the other hand, a good crystal oscillator is easily better than 1x10-11 from second to second; the very best may be a few parts in 10-13. But in the long term, aging can move an OCXO off frequency by parts in 10-9 per week—or even per day!
The idea of the GPS disciplined oscillator (GPSDO) is to combine the good short term stability of the crystal oscillator with the excellent long term stability of the GPS signal. The crossover point is usually somewhere around 1000 seconds, below that time, the crystal oscillator stability predominates; over longer times, the output frequency tracks GPS.
Synchronization with GPS Disciplined Oscillators on NI USRP-293x
The NI USRP includes an advanced timing engine that derives all clock signals from a common 10 MHz reference. This includes independent local oscillators for transmit and receive, the ADC and DAC sample clocks, and the clock for the FPGA processor. The NI USRP-293x models have an integrated GPS-disciplined OCXO clock that replaces the standard, less accurate temperature compensated crystal oscillators (TCXO) GPS-disciplining utilizes the Global Positioning System (GPS) satellite network time to provide a closed-loop control of the 10 MHz OCXO, resulting in near perfect frequency accuracy and setting the internal clock to UTC time within less than 100ns rms. Two GPS-disciplined USRP devices are nearly as accurate as physically sharing a 10 MHz clock and PPS between two USRP devices. This functionality can be enabled by simply connecting a GPS antenna with a clear view of the sky to the SMA RF connector on the back of the USRP. It takes approximately 1 minute to lock to the GPS signal.
| Model | Frequency | GPS-Disciplined | Frequency Accuracy (No GPS Antenna) |
|---|---|---|---|
| USRP-2920 | 50 MHz – 2.2 GHz | No | ± 2.5 ppm |
| USRP-2921 | 2.4 - 2.5 GHz and 4.9 - 5.9 GHz | No | ± 2.5 ppm |
| USRP-2922 | 400 MHz – 4.4 GHz | No | ± 2.5 ppm |
| USRP-2930 | 50 MHz – 2.2 GHz | Yes | ± 25 ppb |
| USRP-2932 | 400 MHz – 4.4 GHz | Yes | ± 25 ppb |
Table 1 Frequency accuracy for selected NI USRP Software Defined Radio Device models
The OCXO facilitates ease of use in a system prototype because frequency offset correction and synchronization is less cumbersome since the two communicating USRP devices can be largely considered frequency synchronized. The integrated GPS improves clock precision through disciplining. Using the disciplining technique, the GPS signals make minor corrections to the OCXO, thus pushing the USRP frequency accuracy error towards zero (0.01 ppb). The distributed USRP systems can effectively act as time synchronized, phase coherent devices even though they might be separated over great distances.
GPSDO-Enabled Hardware Extends Research Capabilities
Most wireless communication technologies require a very stable and accurate reference clock for high frequency accuracy in frequency division duplex (FDD) applications, and tight phase synchronization in time division duplex (TDD) applications. USRP software defined radios with GPSDOs are the ideal option for prototyping both FDD- and TDD-based wireless systems. Table 1 shows a summary for some of FDD wireless technologies’ target frequency accuracy.
Technology | Target Frequency Accuracy |
Stratum 4 & 4E | ±32 ppm |
Stratum 3 & 3E | ±4.6 ppm |
GSM & WCDMA-FDD | ±0.05 ppm |
LTE | ±0.05 ppm |
Home BS LTE | ±0.25 ppm |
Table 2. Target frequency accuracy for some FDD wireless technologies
Such tight frequency reference specification for FDD technologies are hard to meet with a regular TCXO clock. When using a device with a TCXO reference clock, users are forced to add an external OCXO reference clock and some extra wiring to achieve the needed frequency accuracy. These extra components make system setup and troubleshooting more time consuming.
According to 3GPP, mobile technologies such as LTE-TDD and TD-SCDMA require at least 3 us of phase synchronizations. These requirements apply to both the radio interface and the base stations. Base stations usually have integrated GPS receivers as a clock source to meet the synchronization requirements. Therefore, the USRP devices with an integrated GPS receiver create an ideal platform for rapidly prototyping such technologies.
The GPS-disciplined clock on the USRP also allows for synchronization among geographical distances. This property makes the device ideal for distributed MIMO, spectrum monitoring and triangulation, cognitive radio, and adaptive beamforming.

Figure 3 Integrated GPSDO on the NI USRP-293x
NI-USRP Driver for LabVIEW
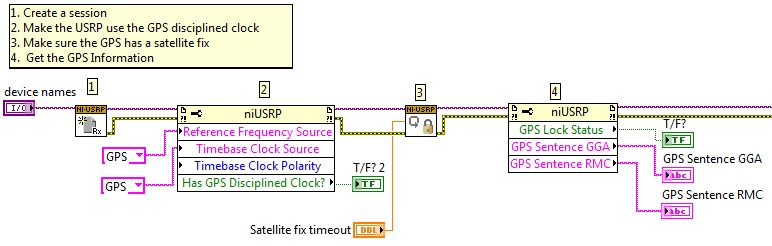
NI-USRP 1.2 added full support for the NI USRP-2930 and NI USRP-2932 devices. The NI USRP-293x devices use the internal OCXO reference clock by default. When a GPS antenna with a clear view of the sky is connected to the back RF SMA connector, the user can then utilize the GPS disciplining capabilities. The NI-USRP 1.2 driver allows the user easily select the reference frequency and timebase clock sources with a property node as shown in Figure 4.

Figure 4 Reference Frequency and Timebase Clock Selections
When using GPS-enabled devices, the NI-USRP driver provides easy access to NEMA location information. Every fetch (Rx) contains a high-precision GPS timestamp, allowing multiple radios to act as a synchronized antenna array around the lab, test range, or entire world.
GPS Receiver Specifications
| GPS Module on the NI USRP-293x Specifications | |||
|---|---|---|---|
| 1 PPS Accuracy | ±50 ns to UTC RMS (1-Sigma) GPS Locked | ||
| Holdover Stability | <±11 μs over 3 hour period at +25C | ||
| 1 PPS Output (OCXO Flywheel Generated) | 3.3 VDC CMOS | ||
| RS232 Control | NMEA & SCPI-99 Control Commands, Integrated into UHD | ||
| GPS Frequency | L1, C/A 1574 MHz | ||
| GPS Antenna | Active (3V compatible) or Passive | ||
| GPS Receiver | 50 Channels, Mobile, WAAS, EGNOS, MSAS capable | ||
| Sensitivity | Acquisition -144 dBm, Tracking -160 dBm | ||
| TTFF | Cold Start: <45 sec, Warm Start: 1 sec, Hot Start: 1 sec | ||
| ADEV | 1E-11 at 1 s | ||
| Warm Up Time / Stabilization Time | <5 min at +25C to 1E-08 Accuracy | ||
| Supply Voltage (Vdd) | 6 VDC | ||
| Power Consumption | <1.8 W Max, 1.35 W Typical | ||
| Operating Temperature | 0 °C to +60 °C | ||
| Storage Temperature | -45 °C to 85 °C | ||
| Oscillator Specifications | |||
| Frequency Output | 10 MHz | ||
| 10 MHz Retrace | ±2E-08 after 1 hour at 25 °C | ||
| Frequency Stability Over Temperature (Unlock Condition) | ±2.5E-08 | ||
| Warm-Up Time | <1 min at +25 °C | ||
| Phase Noise at 10 MHz | 1Hz | -80 dBc/Hz | |
| 10 Hz | -110 dBc/Hz | ||
| 100 Hz | -135 dBc/Hz | ||
| 1 kHz | -145 dBc/Hz | ||
| 10 kHz | <-145 dBc/Hz | ||
Example for a GPS Antenna :
66800-52 from Trimble
http://www.trimble.com/embeddedsystems/pdf/022542-024_GPS_Antenna_DS_1210_US_LR. pdf