サーボモーターの設定とテスト
使用ソフトウェア: Driver Software>>NI-Motion/FlexMotion
使用ソフトウェア・バージョン: 14.0
使用ソフトウェア・バージョンに特化: N/A
二次のソフトウェア: N/A
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
問題: 73xxモーションコントローラを使って、サーボモーターを制御するにはどうすればよいでしょう。
解決策:
この資料は、こちらの資料を参考に作成されています。Getting Started with NI 7340/7350 Motion Controllers and AKD Servo Drives
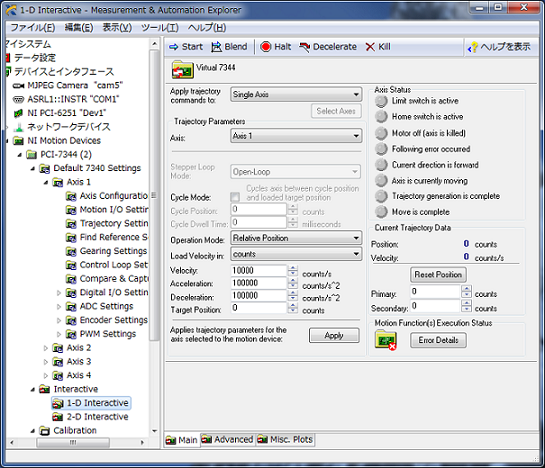
1. Measurement & Automation Explorer (MAX)を開きます。
2. モーションデバイスへ移動します。
- マイシステムを展開します。
- デバイスとインタフェースを展開します。
- NI Motion Devicesを展開します。
- Default 73xx Settingsを展開します。
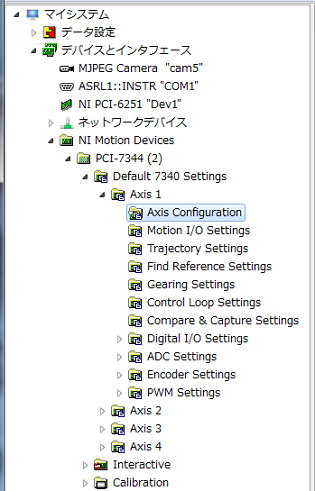
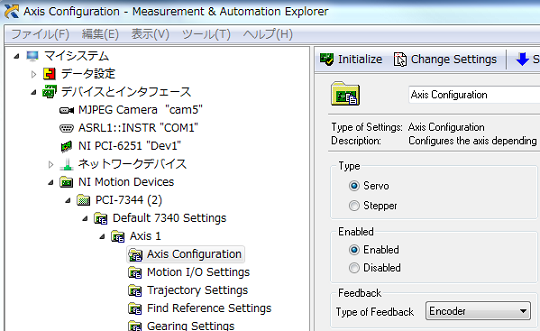
3. サーボモーターの設定を行います。
- 指定軸の下(例えばAxis1)にある、Axis Configurationオプションへ移動します。
- Axis Configurationタブにおいて、TypeをServoに指定します。
4. 一旦、Inhibit、Home、Limitスイッチを無効にします。
- Motion I/O Settingsオプションを選択します。
- すべての信号を無効にします。(Limit Filters、Forward Limit Switches、Reverse Limit Switches、Home Switch、Forward Software Limit、Reverse Software Limit、Inhibit Output)
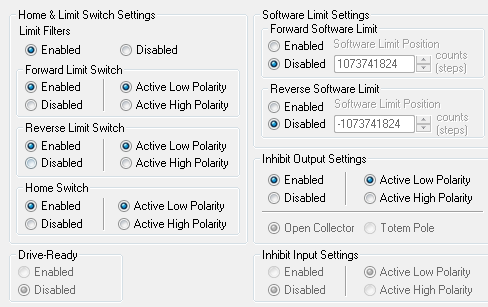
5. LimitとHomeのアクティブ状態を設定します。この作業はリミットが配線されていない場合にリミットアクティブエラーを防止するために行います。
- UMI-7764をお使いの場合 » Active Low Polarity
- UMI-7772/74をお使いの場合 » Active High Polarity
6. Inhibit Output SettingsをActive Low Polarityに設定します。
7. Control Loop Settingsオプションを選択し、下記の変更を行います。
- Kp を 50
- Kd を 30
- Ki を 0
注意:ここで設定した各パラメータはお使いのモーターに対して正しくチューンされたものではありません。単純なテストのためにこのような設定を行っています。セットアップ完了後に、Calibration » Servo Tune » Main タブからPIDチューンを行い、正しいパラメータを設定してください。サーボチューンの詳細はこちらをご覧ください。Understanding Servo Tune
8. Encoder Settingsオプションを設定します。
- Polaritiesにおいて、Line State A/B/IndexがそれぞれActive Highになっていることを確認します。
- Index Reference Criteriaにおいて、Line State A/BがそれぞれActiveになっていることを確認します。
- Encoder counts per revolution を設定します。
注1: フィードバックの精度を高めるため、NIのモーションコントローラはエンコーダからのフィードバック信号のエッジを常に読み取っています。クアドラチャエンコーダの場合、エンコーダからパルスが来るたびに4つのエッジ(A、Bのラインから立ち上がり/立下りの信号が読み取られるため)をカウントします。そのため、もしクアドラチャエンコーダが1回転につき2000パルス出力する場合、実際にコントローラは8000エッジを読み取っており、これがカウントとして認識されます。詳しくは正確なEncoder counts per revolution の値を設定するにはをご覧ください。
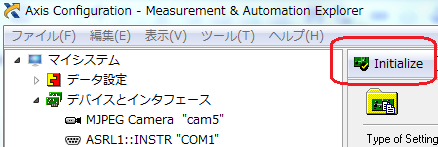
9. MAXで行った設定を、Initializeボタンを押すことで適用します。
10. 設定をテストします。
- 1-D InteractiveのMainタブへ移動します。
- Velocity、Acceleration、Decelerationを設定します。モーターに対して適切な値を設定します。
- Operation ModeをRelative Positionに設定します。
- Reset Positionボタンを押し、現在の位置データを 0にリセットします。
- Target Positionを適切な値に設定します。
- Startボタンをクリックします。
注意:正しくモーターが回転していない場合、設定を見直してみてください。
11. 必要に応じて他のオプションを設定します。
- ヘルプを表示を選択します。
- MAXヘルプを使用することで各設定について詳細が確認できます。ヘルプを表示させた状態でマウスカーソルを、内容を確認したいオブジェクト上に移動させると、ヘルプを確認できます。
12. 最後にMAXからInitializeを行い、設定を反映させます。
関連リンク:
添付:
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
報告日時: 12/29/2014
最終更新日: 02/23/2015
ドキュメントID: 6SSM4CKL