Prototyping and Testing FMCW Lidar
Overview
Prototyping and testing frequency-modulated continuous-wave (FMCW) lidar presents many challenges. Let’s discuss them, breaking them into manageable, actionable pieces, and learning practical guidance on how to surmount them, one by one, all the way to system-level test.
Introduction
When it comes to autonomy, it’s not a question of if, but when—and how. While the industry generally considers lidar an enabling technology that accelerates autonomy, it faces considerable roadblocks to becoming viable at mass production. New lidar designs offer low-cost, low-power, easily manufacturable imaging technology; however, they’re unproven and not commercially available. There’s hope, though. FMCW lidar stands to give automakers a viable sensor modality. But it’s new, and brings unknown development and validation challenges. Let’s look at how adjacent industries have used lessons learned to quell lidar-development concerns.
The semiconductor market has figured out ways to manufacture modulated laser sources and receive chains at high volume and relatively low cost. The aerospace and defense industry has prototyped large-channel-count, high-bandwidth systems with constantly varying requirements. And the automotive sector has set the stage for FMCW lidar testing by releasing FMCW radar test for their existing vehicle lines.
Let’s dive into how you can implement other industries’ strategies and best practices to take advantage of this new technology.
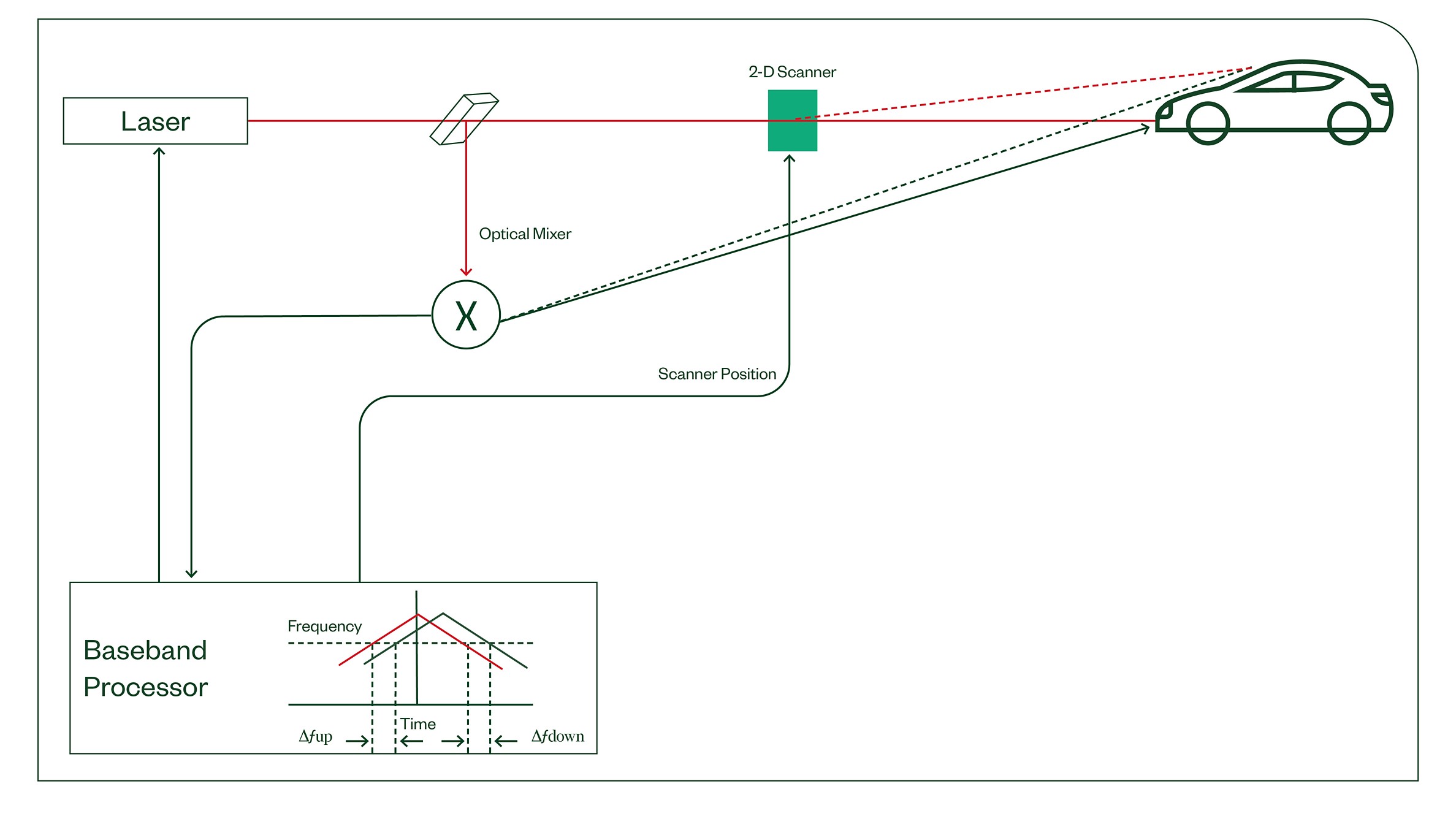
Figure 1. FMCW Lidar Architecture
Prototyping FMCW Lidar
FMCW lidar is an extremely challenging system to put together: It requires multiple perfectly synced, modulated laser sources, and at least as many A/D converters, to push massive amounts of data through complex algorithms, all to give the autonomous system a 3D worldview built out in tiny color-coded points with velocity indications. Forget about testing lidar for a moment—how do developers even build the thing?
One way involves breaking down the FMCW system into an electric domain subsystem and an optical domain subsystem for prototyping.
Prototyping the Electrical Domain Subsystem
The electrical domain subsystem consists of a generated FMCW chirp on the transmit side and a high-bandwidth analog-to-digital converter on the receive side. The more complex of the two is the receive chain, as the received FMCW wave needs to be stripped apart and compared to the reference signal—and only then can it produce the resulting point cloud.
Often, the transmit side uses a multichannel, tightly synchronized arbitrary waveform generator with channel requirements up to and exceeding 32 channels (with complete transmit-system prototyping). You might need only to generate the chirp signal itself (which is typically sub-100 MHz), or you might need to generate the modulated waveform (which might exceed 3 GHz). On the receive chain, high-bandwidth, multichannel, tightly synchronized digitizers connect directly to FPGAs, where you quickly and repeatedly can prototype their signal processing. Many times, these FPGAs—which have lots of digital signal processors and fast Fourier transforms onboard—need to communicate with one another to understand timing and relative position. Only then can they send the results back to a host PC to generate the 4D point cloud.
Because these prototyping systems can get extremely cumbersome, the right technology company partner can save you time and money by building all of these requirements into a single modular FMCW lidar platform.

Figure 2. NI FlexRIO IF Transceivers combine high-speed data converters with Xilinx FPGAs for applications such as lidar test that demand real-time signal processing and high-performance analog input.
Prototyping the Optical-Domain Subsystem
The optical domain requires several additional instruments, which are highly contingent on what type of laser source, photodetector, and scanning (imaging) methodology the lidar manufacturer uses.
Almost all FMCW lidar optical prototyping uses a coherent laser source, as well as a means of converting the electrical domain into the optical domain and mixing it with the optics. Many times, an electrical-to-optical converter (E2O) converts the electrical chirp into an optical chirp, and an optical-to-electrical converter (O2E) converts back to the electrical receive chain. This can require optically mixing a continuous-wave laser source onto an electrically generated chirp.
One perk of PXI is that you can use it for optical prototyping and test systems that complement the electrical systems we just learned about. For example, Coherent Solutions makes optical PXI modules that you can pair with the electrical domain equipment (often in the same synchronized system) to create a complete prototyping platform.

Figure 3. Optoelectrical PXI System
Also, you’ll need to address power, analog and digital control and measurement, and data streaming requirements to complete your FMCW lidar prototype. Companies such as NI, that offer modular instruments in a small form factor, can manage these components in a single system.
Chip-Level Component Validation Methodologies
In the development phase, you need to follow several verification and validation procedures to ensure that the FMCW lidar fulfills its promises. It’s easiest to break the lidar test requirements into chip-, module-, and system-level test.
As with the prototyping system, you’ll want to test the electrical and optical domains separately at first. You need to validate chips and application-specific integrated circuits for each of the components. Here’s a list of chip-level component validation methodologies:
Electrical Domain
Transmit and receive (TIA, CDR, IC driver)
- 2-or 4-port S-parameters with a VNA
- >1 GS/s AWG for driving the components electrically
- >3 GS/s scope for analyzing outputs
- Power meters
- BERT and sampling scope for digital components and building eye diagrams
- TDR for faster and lower-cost S-parameters
- Power supplies
Optical Domain
Transmit (laser, modulator, scanner)
- O2E and vector signal analyzer for relative intensity noise
- OSA for side-mode suppression ratio
- Optical scope, spectrometer, and laser source for chirp linearity (there are other techniques for this)
- Swept laser power source and measurement unit
- Variable optical attenuators and switches for signal routing and measurement
Receive (photodetector)
- Coherent optical laser source
- E2O and AWG or vector signal generator
- Optical mixers
One major challenge of testing optical chips is aligning the optics to measurement equipment. Several companies specialize in this capability, including PI-USA, with their optical alignment technology.
Figure 4. PI USA Parallel Optical Alignment (Image Courtesy of PI USA)
Module-Level FMCW Lidar Testing
When you bring the chips together into a module, you can aggregate several component-level tests. While all of our previously discussed tests are valid for module-level testing, they’re not broken down into individual-component key performance indicators (KPIs); rather, they contain the KPIs for the entire module.
If you’re moving device- and module-level testing from bench to production, it’s best to reuse the validation hardware and test software. Many of the test processes we discussed are used in a production environment—either at the wafer level or the production-module level at an off-shore assembly and test house or contract manufacturer. And because optimizing unit test cost translates to minimizing tester cost, test time, and floor space, you’ll once again benefit from partnering with a company such as NI that can repackage bench test equipment into a production tester and utilize PXI to optimize test time.
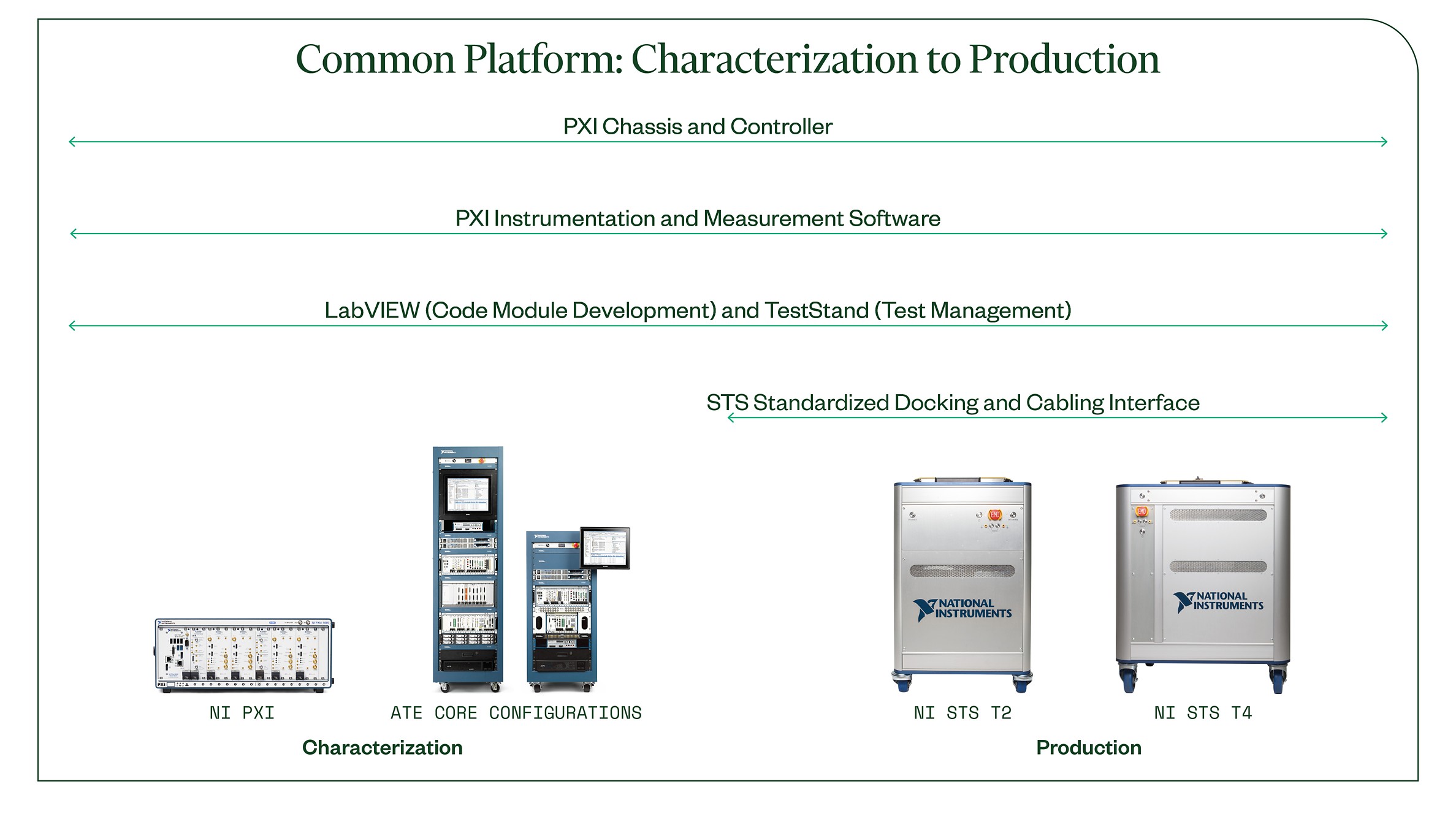
Figure 5. Common Platform from Characterization to Production
System-Level FMCW Lidar Testing
At this point, all lidar hardware and software come together to receive system-level testing. The ideal system-level testing would place a complete FMCW lidar into a small chamber and optically simulate a real-world long-range environment that tricks the lidar into building a point cloud emulating that real-world environment. As of this writing, there is no low-cost, commercially available FMCW full point-cloud-emulation methodology.
However, we optically can simulate objects and targets, which is extremely beneficial for validating optics and algorithms and performing calibration, and during production test. NI Partners such as Konrad Technologies, Dvin Technologies, and Averna offer lidar object emulation and environmental simulation solutions.
We also can digitally inject signals behind the optics to make the lidar system think it’s seeing a complete point cloud.
Because there is no ideal system-level validation, most engineers rely on field testing. They place known objects and their characteristics either indoors or outdoors for the lidar system to image. Then, they validate the lidar performance against ground truth and pass/fail the system. While many companies currently use this for lidar system end-of-line production test, it’s difficult to scale.
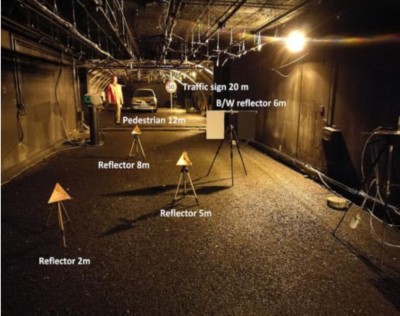
Figure 6. Lidar Field Testing Range1
Conclusion
Lidar technology is constantly evolving. There’s so much work left to be done to make self-driving cars a reality, and FMCW lidar stands to be a major contributor. But based on the challenges we’ve seen here, it’s clear that companies with differing domain expertise need to collaborate to make lidar a commercially viable reality. Let’s work together to connect those challenges to solutions that deliver results. Our NI ADAS/Autonomy Team is ready to meet you, so contact us and let's get started.
An NI Partner is a business entity independent from NI and has no agency, partnership, or joint-venture relationship with NI.