NI-XNET CAN, LIN, and FlexRay Platform Overview
Overview
Contents
- NI-XNET: Top Performance With Less Programming
- NI-XNET Key Features and Benefits
- Products
- One API for CAN, LIN, and FlexRay
- One API for Windows and Real-Time OSs
- Learn More
NI-XNET: Top Performance With Less Programming
NI-XNET interfaces combine the performance and flexibility of low-level microcontroller interfaces with the speed and power of Windows and LabVIEW Real-Time OS development. Designed from the ground up for performance and ease of use in demanding applications such as hardware-in-the-loop simulation, these interfaces work well in high-signal-count, low-latency environments.
The key technology behind the performance of NI-XNET is the NI-XNET device-driven DMA engine. This patent-pending technology reduces system latency, a common pain point for PC-based CAN, LIN, and FlexRay interfaces, from milliseconds to microseconds. The engine works with onboard per-port processors to move CAN, LIN, and FlexRay frames and signals between the interface and the user program without CPU interrupts, freeing host processor time for processing complex models and applications.
NI-XNET Key Features and Benefits

- NI-XNET driver software: Writes frame and signal applications in NI LabVIEW and NI LabWindows™/CVI as well as C/C++. The same read and write functions are used for CAN, LIN, and FlexRay, greatly simplifying systems that use multiple networks.
- NI-XNET device-driven DMA engine: Streams full FlexRay (up to 10 Mbit/s per FlexRay channel), CAN, and LIN bus loads on all ports with no frame loss.
- Dedicated per-port processors: Manage up to 192 hardware-accelerated frames, reducing host system load and software complexity.
- Integration with NI products: Take advantage of the microsecond-level timestamping, external timebase support, and PXI/RTSI triggering that enable NI-XNET interfaces to integrate with hundreds of NI PCI, PXI, and C Series devices for a wide variety of custom applications, ranging from synchronized data acquisition and bus-level measurements to fault-insertion and large distributed systems.
- Bundled software: Receive NI-XNET CAN, LIN, and FlexRay interfaces, including the NI-XNET driver and API, NI-XNET Bus Monitor, and NI-XNET Database Editor, at no extra cost.
Get Started With the NI-XNET API for LabVIEW - Integrated signal databases: Automatically translate CAN, LIN, and FlexRay frames to engineering-level signals, a feature often found only in turnkey applications, because the NI-XNET API works with the interface processors. Featuring integrated support for industry-standard signal databases including FIBEX, CANdb (.DBC), LDF, and NI-CAN (.NCD), NI-XNET simplifies building custom applications to work with other tools in complex embedded design workflows.
Learn More About FIBEX and the NI-XNET Database Editor - Backward compatibility: Achieve compatibility with most legacy NI-CAN Frame and Channel API applications written for NI Series 2 and USB CAN interfaces using NI-XNET interfaces. The NI-XNET NI-CAN Compatibility layer operates at the driver level, ensuring a drop-in performance boost to established in-house applications without time-consuming code refactoring and recompiling.
Learn About the NI-CAN Compatibility Layer - Integrated transceivers: Simplify setup, increase reliability, and avoid hidden costs with the integrated, onboard transceivers in NI-XNET CAN, LIN, and FlexRay interfaces. NI-XNET CAN interfaces are available in high-speed/FD, low-speed, and software-selectable models.
- Signal database support: Work with industry-standard CAN, LIN, and FlexRay signal database formats including FIBEX, CANdb, LDF, and NI-CAN (.NCD). With support for up to 128 hardware-accelerated frames, NI-XNET devices offload repetitive processing from the host system. NI-XNET interfaces integrate and synchronize with NI LabVIEW software and PXI modular instrumentation.
Products
| Network, Ports | PCI | PXI | C Series |
| NI-XNET FlexRay, 2-port | PCI-8517/2 | PXI-8517/2 | |
| NI-XNET CAN, high-speed/FD, 1- or 2-port | PCI-8512 | PXI-8512 | NI 9862 |
| NI-XNET CAN, software-selectable/FD, 1- or 2-port | PCI-8513 | PXI-8513 | |
| NI-XNET LIN, 2-port | PCI-8516/2 | PXI-8516/2 | |
| NI-XNET LIN, 1-port | NI 9866 |
One API for CAN, LIN, and FlexRay
NI-XNET CAN Programming
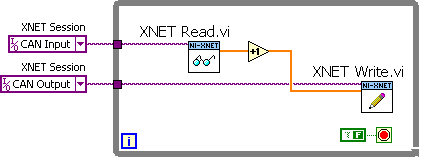
Figure 1. Simple NI-XNET Example Code for Reading and Writing CAN Signals
NI-XNET FlexRay Programming

Figure 2. The Same NI-XNET Code Adapted to Reading and Writing FlexRay Signals by Changing the Session Inputs
Emerging embedded networks, especially in the automotive industry, are combining CAN, LIN, and FlexRay buses to maximize performance while maintaining cost benefits and reducing transition efforts. A common API simplifies the development and maintenance of applications that prototype, simulate, and test these hybrid embedded networks. With the extra performance benefits of the FlexRay bus comes added complexity and bandwidth requirements for test, simulation, and prototyping systems.
The NI-XNET API is designed to make it easier for both new and experienced CAN, LIN, and FlexRay engineers to get up and running quickly with CAN, LIN, and FlexRay applications. With the tight integration of the LabVIEW project, more than 140 out-of-the-box examples, example signal databases, and comprehensive documentation, NI-XNET makes it easier to develop CAN, LIN, and FlexRay applications. NI-XNET also makes it easy to use the same software application in different environments and use cases by working with the same NI-XNET API for PCI, PXI, NI CompactDAQ, and NI CompactRIO.
One API for Windows and Real-Time OSs
Real-time processing of CAN, LIN, and FlexRay signal and frame data is crucial for accurate hardware-in-the-loop simulation and rapid control prototyping. LabVIEW applications for NI-XNET devices work on both Windows and LabVIEW Real-Time targets with little to no code modification, which simplifies building and maintaining code across platforms. NI-XNET interfaces are designed to operate in a real-time environment with minimum jitter and maximum performance, making simulations more accurate and test systems more reliable.
NI Device-Driven DMA Engine
NI-XNET interfaces combine the performance of low-level microcontroller programming with the speed and power of Windows and LabVIEW Real-Time OS development. The patent-pending NI-XNET device-driven DMA engine reduces system latency, a common pain point for PC-based CAN interfaces, from milliseconds to microseconds. The engine enables the onboard processor to move CAN frames and signals between the interface and the user program without CPU interrupts, freeing host processor time for processing complex models and applications.
Learn More
The mark LabWindows is used under a license from Microsoft Corporation. Windows is a registered trademark of Microsoft Corporation in the United States and other countries.