What is the Modbus Protocol & How Does It Work?
Overview
Contents
- What Is the Modbus Protocol?
- Protocol Data Unit
- Application Data Unit
- New Function Codes
- Network Layers
- ADU Modifications
What Is the Modbus Protocol?
Modbus is a request-response protocol implemented using a master-slave relationship. In a master-slave relationship, communication always occurs in pairs—one device must initiate a request and then wait for a response—and the initiating device (the master) is responsible for initiating every interaction. Typically, the master is a human machine interface (HMI) or Supervisory Control and Data Acquisition (SCADA) system and the slave is a sensor, programmable logic controller (PLC), or programmable automation controller (PAC). The content of these requests and responses, and the network layers across which these messages are sent, are defined by the different layers of the protocol.
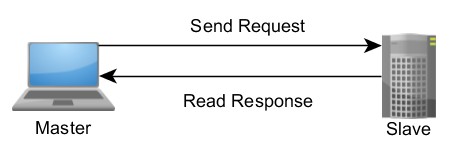
Figure 1. A Master-Slave Networking Relationship
Layers of the Modbus Protocol
In the initial implementation, Modbus was a single protocol built on top of serial, so it could not be divided into multiple layers. Over time, different application data units were introduced to either change the packet format used over serial or to allow the use of TCP/IP and user datagram protocol (UDP) networks. This led to a separation of the core protocol, which defines the protocol data unit (PDU), and the network layer, which defines the application data unit (ADU).
Protocol Data Unit
The PDU and the code that handles it comprise the core of the Modbus Application Protocol Specification. This specification defines the format of the PDU, the various data concepts used by the protocol, the use of function codes to access that data, and the specific implementation and restrictions of each function code.
The Modbus PDU format is defined as a function code followed by an associated set of data. The size and contents of this data are defined by the function code, and the entire PDU (function code and data) cannot exceed 253 bytes in size. Every function code has a specific behavior that slaves can flexibly implement based on their desired application behavior. The PDU specification defines core concepts for data access and manipulation; however, a slave may handle data in a way that is not explicitly defined in the specification.
Accessing Data in Modbus and the Modbus Data Model
Modbus-accessible data is stored, in general, in one of four data banks or address ranges: coils, discrete inputs, holding registers, and input registers. As with much of the specification, the names may vary depending on the industry or application. For example, holding registers may be referred to as output registers, and coils may be referred to as digital or discrete outputs. These data banks define the type and access rights of the contained data. Slave devices have direct access to this data, which is hosted locally on the devices. The Modbus-accessible data is generally a subset of the device’s main memory. In contrast, Modbus masters must request access to this data through various function codes. The behavior of each block is described in Table 1.
| Memory Block | Data Type | Master Access | Slave Access |
| Coils | Boolean | Read/Write | Read/Write |
| Discrete Inputs | Boolean | Read-only | Read/Write |
| Holding Registers | Unsigned Word | Read/Write | Read/Write |
| Input Registers | Unsigned Word | Read-only | Read/Write |
Table 1. Modbus Data Model Blocks
These blocks give you the ability to restrict or permit access to different data elements and also to provide simplified mechanisms at the application layer to access different data types.
The blocks are completely conceptual. They may exist as separate memory addresses in a given system, but they may also overlap. For example, coil one may exist in the same location in memory as the first bit of the word represented by holding register one. The addressing scheme is entirely defined by the slave device, and its interpretation of each memory block is an important part of the device’s data model.
Data Model Addressing
The specification defines each block as containing an address space of as many as 65,536 (216) elements. Within the definition of the PDU, Modbus defines the address of each data element as ranging from 0 to 65,535. However, each data element is numbered from 1 to n, where n has a maximum value of 65,536. That is, coil 1 is in the coil block at address 0, while holding register 54 is at address 53 in the section of memory that the slave has defined as holding registers.
The full ranges allowed by the specification are not required to be implemented by a given device. For example, a device may choose not to implement coils, discrete inputs, or input registers and instead only use holding registers 150 through 175 and 200 through 225. This is perfectly acceptable, and invalid access attempts would be handled through exceptions.
Data Addressing Ranges
Although the specification defines different data types as existing in different blocks and assigns a local address range to each type, this does not necessarily translate into an intuitive addressing scheme for the purposes of documentation or understanding a given device’s Modbus-accessible memory. To simplify the discussion of memory block locations, a numbering scheme was introduced, which added prefixes to the address of the data in question.
For example, rather than referring to an item as holding register 14 at address 13, a device manual would refer to a data item at address 4,014, 40,014, or 400,014. In each case, the first number specified is 4 to represent holding registers, and the address is specified using the remaining numbers. The difference between 4XXX, 4XXXX, and 4XXXXX depends on the address space used by the device. If all 65,536 registers are in use, 4XXXXX notation should be used, as it allows for a range from 400,001 to 465,536. If only a few registers are used, a common practice is to use the range 4,001 through 4,999.
In this addressing scheme, each data type is assigned a prefix as shown in Table 2.
| Data Block | Prefix |
| Coils | 0 |
| Discrete Inputs | 1 |
| Input Registers | 3 |
| Holding Registers | 4 |
Table 2. Data Range Prefixes
Coils exist with a prefix of 0. This means that a reference of 4001 could refer to either holding register one or coil 4001. For this reason, all new implementations are recommended to use 6-digit addressing with leading zeros, and to note this in the documentation. Thus, holding register one is referenced as 400,001 and coil 4001 is referenced as 004,001.
Data Address Start Values
The difference between memory addresses and reference numbers is further complicated by the indexing selected by a given application. As mentioned previously, holding register one is at address zero. Typically, reference numbers are one-indexed, meaning that the start value of a given range is one. Thus, 400,001 translates literally to holding register 00001, which is at address 0. Some implementations choose to start their ranges at zero, meaning that 400,000 translates to the holding register at address zero. Table 3 demonstrates this concept.
| Address | Register Number | Number (1-indexing, standard) | Number (0-indexing, alternative) |
| 0 | 1 | 400001 | 400000 |
| 1 | 2 | 400002 | 400001 |
| 2 | 3 | 400003 | 400002 |
Table 3. Register Indexing Schemes
One-indexed ranges are common and strongly recommended. In either case, the start value for each range should be noted in documentation.
Large Data Types
The Modbus standard supplies a relatively simplistic data model that does not include additional data types outside of an unsigned word and bit value. Although this is sufficient for some systems, where the bit values correspond to solenoids and relays and the word values correspond to unscaled ADC values, it is insufficient for more advanced systems. As a result, many Modbus implementations include data types that cross register boundaries. The NI LabVIEW Datalogging and Supervisory Control (DSC) Module and KEPServerEX both define a number of reference types. For example, strings stored in a holding register follow the standard form (400,001) but are followed by a decimal, the length, and the byte ordering of the string (400,001.2H, a two character string in holding register 1 where the high byte corresponds to the first character of the string). This is required because each request has finite size, and so a Modbus master must know the exact bounds of the string rather than searching for a length or delimiter like NULL.
Bit Access
In addition to allowing access to data that crosses a register boundary, some Modbus masters support references to individual bits within a register. This is beneficial as is allows devices to combine data of every type in the same memory range without having to split binary data into the coil and discrete input ranges. This is usually referenced using a decimal point and the bit index or number, depending on the implementation. That is, the first bit in the first register may be 400,001.00 or 400,001.01. It is recommended that any documentation specify the indexing scheme used.
Data Endianness
Multiregister data, like single-precision floating point value, can be easily transferred in Modbus by splitting the data across two registers. Because this is not defined by the standard, the endianness (or byte order) of this split is not defined. Although each unsigned word must be sent in network (big-endian) byte order to satisfy the standard, many devices reverse the byte order for multibyte data. Figure 2 shows an unusual but valid example of this.

Figure 2. Byte Order Swap for Multiword Data
It is up to the master to understand how the slave is storing information in memory and to decode it properly. It is recommended that documentation reflect the word order used by the system. Endianness can also be added as a system configuration option, with underlying encode and decode functions, if flexibility in implementation is required.
Strings
Strings can be easily stored in Modbus registers. For simplicity, some implementations require that string lengths be multiples of two, with any additional space filled with null values. Byte order is also a variable in string interactions. String format may or may not include a NULL as the final value. As an example of this variability, some devices may store data as shown in Figure 3.
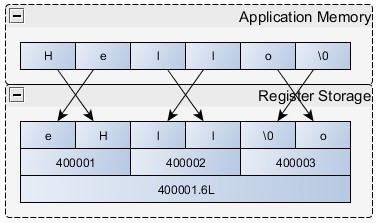
Figure 3. Byte Order Reversal in Modbus Strings
Understanding Function Codes
In contrast to the data model that can vary significantly from device to device, function codes and their data are defined explicitly by the standard. Each function follows a pattern. First, the slave validates inputs like function code, data address, and data range. Then, it executes the requested action and sends a response appropriate to the code. If any step in this process fails, an exception is returned to the requestor. The data transport for these requests is the PDU.
The Modbus PDU
The PDU consists of a one-byte function code followed by up to 252 bytes of function-specific data.

The function code is the first item to be validated. If the function code is not recognized by the device receiving the request, it responds with an exception. Should the function code be accepted, the slave device begins decomposing the data according to the function definition.
Because the packet size is limited to 253 bytes, devices are constrained on the amount of data that can be transferred. The most common function codes can transfer between 240 and 250 bytes of actual data from the slave data model, depending on the code.
Slave Function Execution
As defined by the data model, different functions are defined to access different conceptual blocks of data. A common implementation is to have codes access static memory locations, but other behaviors are available. For example, function code 1 (read coils) and 3 (read holding registers) may access the same physical location in memory. In contrast, function code 3 (read holding registers) and 16 (write holding registers) may access completely different locations in memory. Thus, the execution of each function code is best considered as part of the slave data model definition.
Regardless of the actual behavior performed, all slave devices are expected to follow a simple state diagram for each request. Figure 5 shows an example of this for code 1, read coils.
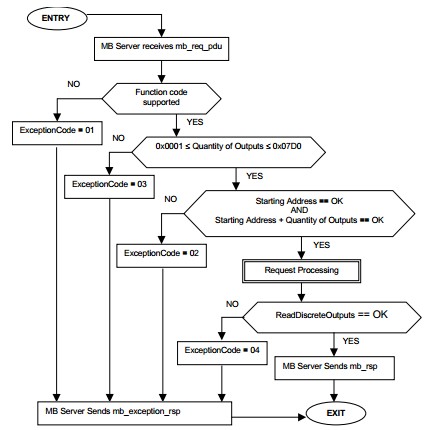
Figure 5. Read Coils State Diagram From the Modbus Protocol Specification
Each slave must validate the function code, the number of inputs, the starting address, the total range, and the execution of the slave-defined function that actually performs the read.
Although static address ranges are shown in the state diagram above, the needs of real-world systems can cause these to vary somewhat from the defined numbers. In some cases, slave devices cannot transfer the maximum number of bytes defined by the protocol. That is, rather than allowing a master to request 0x07D0 inputs, it can only respond with 0x0400. Similarly, a slave data model may define the range of acceptable coil values as address 0 through 500. If a master makes a request for 125 starting at address 0, this is OK, but if a master makes the same request starting at address 400, the final coil will be at address 525, which is out of range for this device and would result in exception 02 as defined by the state diagram.
Standard Function Codes
The definition of each standard function code is in the specification. Even for the most common function codes, there are inevitable mismatches between the functions enabled on the master and what the slave can handle. To address this, early versions of the Modbus TCP specification defined three conformance classes. The official Modbus Conformance Test Specification does not reference these classes and instead defines conformance on a per-function basis; however, they can still be convenient for understanding. It is recommended that any documentation follow the test specification and define their conformance by which codes they support, rather than by the legacy classifications.
Class 0 Codes
Class 0 codes are generally considered the bare minimum for a useful Modbus device, as they give a master the ability to read from or write to the data model.
| Code | Description |
| 3 | Read Multiple Registers |
| 16 | Write Multiple Registers |
Table 4. Conformance Class 0 Codes
Class 1 Codes
Class 1 function codes consist of the other codes necessary to access all of the types of the data model. In the original definition, this list included function code 7 (read exception). However, this code is defined by the current specification as a serial-only code.
| Code | Description |
| 1 | Read Coils |
| 2 | Read Discrete Inputs |
| 4 | Read Input Registers |
| 5 | Write Single Coil |
| 6 | Write Single Register |
| 7 | Read Exception Status (serial-only) |
Table 5. Conformance Class 1 Codes
Class 2 Codes
Class 2 function codes are more specialized functions that are less commonly implemented. For example, Read/Write Multiple Registers may help reduce the total number of request-response cycles, but the behavior can still be implemented with class 0 codes.
| Code | Description |
| 15 | Write Multiple Coils |
| 20 | Read File Record |
| 21 | Write File Record |
| 22 | Mask Write Register |
| 23 | Read/Write Multiple Registers |
| 24 | Read FIFO |
Table 6. Conformance Class 2 Codes
Modbus Encapsulated Interface
The Modbus encapsulated interface (MEI) code, function 43, is used to encapsulate other data within a Modbus packet. At present, two MEI numbers are available, 13 (CANopen) and 14 (Device Identification).
Function 43/14 (Device Identification) is useful in that it allows for the transfer of up to 256 unique objects. Some of these objects are predefined and reserved, such as vendor name and product code, but applications can define other objects to transfer as generic data sets.
This code is not commonly implemented.
Exceptions
Slaves use exceptions to indicate a number of bad conditions, from a malformed request to incorrect inputs. However, exceptions can also be generated as an application-level response to an invalid request. Slaves do not respond to requests issued with an exception. Instead, the slave ignores incomplete or corrupted requests and begins waiting for a new incoming message.
Exceptions are reported in a defined packet format. First, a function code is returned to the requesting master equal to the original function code, except with its most significant bit set. This is equivalent to adding 0x80 to the value of the original function code. In lieu of the normal data associated with a given function response, exception responses include a single exception code.
Within the standard, the four most common exception codes are 01, 02, 03, and 04. These are shown in Table 7 with standard meanings by each function.
| Exception Code | Meaning |
| 01 | The received function code is not supported. To confirm the original function code, subtract 0x80 from the returned value. |
| 02 | The request attempted to access an invalid address. In the standard, this can happen only if the starting address and the requested number of values exceeds 216. However, some devices may restrict this address space in their data model. |
| 03 | The request had incorrect data. In some cases, this means that there was a parameter mismatch, for example between the number of registers sent and the “byte count” field. More commonly, the master requested more data than either the slave or protocol allows. For example, a master may read only 125 holding registers at a time, and resource-limited devices may restrict this value to even fewer registers. |
| 04 | An unrecoverable error occurred while attempting to process the request. This is a catchall exception code that indicates the request was valid, but the slave could not execute it. |
Table 7. Common Modbus Exception Codes
The state diagram for every function code should cover at least exception code 01 and usually includes exception code 04, 02, 03, and any other defined exception codes are optional.
Application Data Unit
In addition to the functionality defined at the PDU core of the Modbus protocol, you can use multiple network protocols. The most common protocols are serial and TCP/IP, but you can use others like UDP as well. To transmit data necessary for Modbus across these layers, Modbus includes a set of ADU variants that are tailored to each network protocol.
Common Features
Modbus requires certain features to provide reliable communication. The Unit ID or Address is used in each ADU format to provide routing information to the application layer. Each ADU comes with a full PDU, which includes the function code and associated data for a given request. For reliability, each message includes error-checking information. Finally, all ADUs provide a mechanism for determining the beginning and end of a request frame, but implements these differently.
Standard Formats
The three standard ADU formats are TCP, remote terminal unit (RTU), and ASCII. RTU and ASCII ADUs are traditionally used over a serial line, while TCP is used over modern TCP/IP or UDP/IP networks.
TCP/IP
The TCP ADUs consists of the Modbus Application Protocol (MBAP) Header concatenated with the Modbus PDU. The MBAP is a general-purpose header that depends on a reliable networking layer. The format of this ADU, including the header, is shown in Figure 6.

The data fields of the header indicate its use. First, it includes a transaction identifier. This is valuable on a network where multiple requests can be outstanding simultaneously. That is, a master can send requests 1, 2, and 3. At some later point, a slave can respond in the order 2, 1, 3, and the master can match the requests to the responses and parse data accurately. This is useful for Ethernet networks.
The protocol identifier is normally zero, but you can use it to expand the behavior of the protocol. The length field is used by the protocol to delineate the length of the rest of the packet. The location of this element also indicates the dependency of this header format on a reliable networking layer. Because TCP packets have built-in error checking and ensure data coherency and delivery, packet length can be located anywhere in the header. On a less inherently reliable network such as a serial network, a packet could be lost, having the effect that even if the stream of data read by the application included valid transaction and protocol information, corrupted length information would make the header invalid. TCP provides a reasonable amount of protection against this situation.
The Unit ID is typically unused for TCP/IP devices. However, Modbus is such a common protocol that many gateways are developed, which convert the Modbus protocol into another protocol. In the original intended use case, a Modbus TCP/IP to serial gateway could be used to allow connection between new TCP/IP networks and older serial networks. In such an environment, the Unit ID is used to determine the address of the slave device that the PDU is actually intended for.
Finally, the ADU includes a PDU. The length of this PDU is still limited to 253 bytes for the standard protocol.
RTU
The RTU ADU appears to be much simpler, as shown in Figure 7.

Unlike the more complex TCP/IP ADU, this ADU includes only two pieces of information in addition to the core PDU. First, an address is used to define which slave a PDU is intended for. On most networks, an address of 0 defines the “broadcast” address. That is, a master may send an output command to address 0 and all slaves should process the request but no slave should respond. Besides this address, a CRC is used to ensure the integrity of the data.
However, the reality of the situation in more modern implementations is far from simple. Bracketing the packet is a pair of silent times—that is, periods where there is no communication on the bus. For a baud rate of 9,600, this rate is around 4 ms. The standard defines a minimum silence length, regardless of baud rate, of just under 2 ms.
First, this has a performance drawback as the device must wait for the idle time to complete before the packet can be processed. More dangerous, however, is the introduction of different technologies used for serial transfer and much faster baud rates than when the standard was introduced. With a USB-to-serial converter cable, for example, you have no control over the packetization and transfer of data. Testing shows that using a USB-to-serial cable with the NI-VISA driver introduces large, variably sized gaps in the data stream, and these gaps—periods of silence—trick specification-compliant code into believing that a message is complete. Because the message is not complete, this usually leads to an invalid CRC and to the device interpreting the ADU as being corrupted.
In addition to issues with transmission, modern driver technologies abstract serial communication significantly and typically require a polling mechanism from the application code. For example, neither the .NET Framework 4.5 SerialPort Class nor the NI-VISA driver provide a mechanism for detecting silence on a serial line except by polling the bytes on the port. This results in a sliding scale of poor performance (if polling is performed too slowly) or high CPU usage (if polling is performed too quickly).
A common method for addressing these issues is to break the layer of abstraction between the Modbus PDU and the networking layer. That is, the serial code interrogates the Modbus PDU packet to determine the function code. Combined with other data in the packet, the length of the remaining packet can be discovered and used to determine the end of the packet. With this information, a much longer time-out can be used, allowing for transmission gaps, and application-level polling can occur much more slowly. This mechanism is recommended for new development. Code that does not employ this may experience a larger than expected number of “corrupted” packets.
ASCII
The ASCII ADU is more complex than RTU as shown in Figure 8, but also avoids many of the issues of the RTU packet. However, it has some of its own disadvantages.

Resolving the issue of determining packet size, the ASCII ADU has a well-defined and unique start and end for each packet. That is, each packet begins with “:” and ends with a carriage return (CR) and line feed (LF). In addition, serial APIs like NI-VISA and the .NET Framework SerialPort Class can easily read data in a buffer until a specific character—like CR/LF—is received. These features make it easy to process the stream of data on the serial line efficiently in modern application code.
The downside of the ASCII ADU is that all data is transferred as hexadecimal characters encoded in ASCII. That is, rather than sending a single byte for the function code 3, 0x03, it sends the ASCII characters “0” and “3,” or 0x30/0x33. This makes the protocol more human-readable, but also means that twice as much data must be transferred across the serial network and that the sending and receiving applications must be capable of parsing the ASCII values.
Extending Modbus
Modbus, a relatively simple and open standard, can be modified to suit the needs of a given application. This is most common for communication between an HMI and PLC or PAC, as this is a situation in which a single organization has control over both endpoints of the protocol. Developers of sensors, for example, are more likely to adhere to the written standard because they typically only control the implementation of their slave, and interoperability is desirable.
In general, modifying the protocol is not recommended. This section is merely provided as an acknowledgment of the mechanisms that others have used to adjust the behavior of the protocol.
New Function Codes
Some function codes are defined, but the Modbus standard does allow you to develop additional function codes. Specifically, function codes 1 through 64, 73 through 99, and 111 through 127 are public codes that are reserved and guaranteed to be unique. The remaining codes, 65 through 72 and 100 through 110, are for user-defined use. With these user-defined codes, you can use any data structure. Data can even exceed the standard 253 byte limit for the Modbus PDU, but the entire application should be validated to ensure that other layers work as expected when the PDU exceeds the standard limit. Function codes above 127 are reserved for exception responses.
Network Layers
Modbus can run on many network layers besides serial and TCP. A potential implementation is UDP because it is suited to the Modbus communication style. Modbus is a message-based protocol at its core, so UDP’s ability to send a well-defined packet of information without any additional application-level information, like a start character or length, makes Modbus extremely simple to implement. Rather than require an additional ADU or reuse an existing ADU, Modbus PDU packets can be sent using a standard UDP API and be received fully formed on the other end. Although TCP is advantageous for some protocols because of the built-in acknowledgement system, Modbus performs acknowledgement at the application layer. However, using UDP in this way does eliminate the transaction identifier field in the TCP ADU, which rids the possibility of multiple simultaneous outstanding transactions. Therefore, the master must be a synchronous master or the UDP packet must have an identifier to help the master organize requests and responses. A suggested implementation would be to use the TCP/IP ADU on a UDP network layer.
ADU Modifications
Finally, an application could choose to modify an ADU, or use unutilized portions of an existing ADU like TCP. For example, TCP defines a 16-bit length field, a 16-bit protocol, and an 8-bit unit ID. Given that the largest Modbus PDU is 253 bytes, the high byte of the length field is always zero. For Modbus/TCP, the protocol field and unit ID are always zero. A simple extension of the protocol might send three packets simultaneously by changing the protocol field to a non-zero number and using the two unused bytes (unit ID and the high byte of the length field) to send the lengths of two additional PDUs (see Figure 9).

Figure 9. Sample Modification of the TCP ADU