3D直交座標回転 (方向) (配列)
- 更新日2025-07-30
- 4分で読める
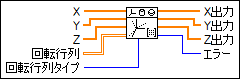
三次元の直交座標を方向法を使用して反時計方向に回転させます。X入力にデータを配線して自動的に使用する多態性インスタンスを決定するか、インスタンスを手動で選択します。
入力/出力
 X
—
X
—
Xは入力x座標を指定します。
Y
—
Yは入力y座標を指定します。
Z
—
Zは入力z座標を指定します。  回転行列
—
回転行列
—
回転行列は、3 x 3の方向の余弦行列を指定します。回転行列タイプが方向余弦の場合、回転行列の各要素は [-1, 1]の範囲内である必要があります。  回転行列タイプ
—
回転行列タイプ
—
回転行列タイプは、回転行列行列が方向角または方向余弦を含むかどうかを決定します。
 X出力
—
X出力
—
X出力は回転されたx座標を返します。
Y出力
—
Y出力は回転されたy座標を返します。
Z出力
—
Z出力はシフトされたz座標を返します。  エラー
—
エラー
—
エラーは、VIからのエラーまたは警告を返します。エラーは「エラーコードからエラークラスタ」VIに配線して、エラーコードまたは警告をエラークラスタに変換できます。 |
ある点 Pに対して、下図のようにα、β、γをベクトルOPの方向角とする:

方向角の余弦は方向余弦です。
回転前のポイント P の座標は (x, y, z) です。回転後のポイント P の座標は (x', y', z') です。

ここで、Aは以下のように定義される回転行列です。

α1、β1、γ 1はX'軸のX軸、Y軸、Z軸に対する方向角、α2、β2、γ 2はY'軸のX軸、Y軸、Z軸に対する方向角、α3、β3、γ 3はZ軸のX軸、Y軸、Z軸に対する方向角とする。