Regeneration Considerations Using the NI C Series Drive Modules
Overview
Contents
- C Series Motor Drive Modules Overview
- What is Regeneration?
- Determining if Regeneration is a Problem for Your Application
- Calculating Additional Capacitance
- Summary
C Series Motor Drive Modules Overview
NI 9501 – C Series Stepper Motor Drive
The NI 9501 connects directly to hybrid (2-phase) step motors.
NI 9502 – C Series PMSM Brushless Servo Drive
The NI 9502 connects directly to permanent magnet synchronous brushless motors. These motors are often also referred to as AC Servo, Brushless DC, Brushless AC, or Brushless Motors.
NI 9505 – C Series DC Brushed Motor Drive with Encoder Feedback
The NI 9505 connects directly to a DC brushed motor and provides support for incremental encoder feedback.
What is Regeneration?
When a load is accelerated electrical energy is converted into mechanical energy; this is the basic definition of a motor. When a moving motor and load are required to decelerate rapidly, the conversion is reversed; this is the basic definition of a generator. The kinetic and potential energy of the load drives the motor's shaft which generates energy back to the drive; this is called regenerative energy or simply regeneration.
During regeneration, a portion of the energy is dissipated, or lost, due to friction in the mechanical system. The majority of the energy is dissipated within the motor terminal resistance, cabling, and drive electronics due to I2 * R losses. The regenerative energy not lost is added back to the electrical energy already stored in the capacitors of the motor drive and the DC power supply. The additional energy causes the voltage on the capacitors to increase. Typically, the energy generated during regeneration is satisfactorily absorbed by the mechanical system, motor, and capacitance. In some cases, usually due to a high inertial mismatch between the load and motor, excessive energy is added to the capacitors causing the voltage to rise. If the voltage exceeds the overvoltage detection for either the motor drive or power supply the component shuts down, disabling the motor. If the voltage rises too high it could cause permanent damage to the motor drive, power supply, or both. Figure 1 provides a simplified illustration of the power supply and motor drive connection.
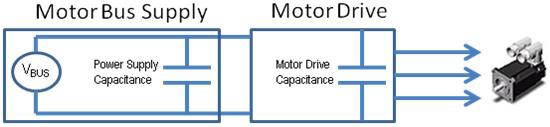
Figure 1: Motor Bus Power Supply and Drive Connection
Determining if Regeneration is a Problem for Your Application
In order to ascertain if regeneration will be problematic you must determine the voltage rise on the capacitors. In most cases, you will want to ensure the voltage never exceeds the overvoltage detection level for the motor drive or power supply otherwise the component will shut down, disabling the motor. If the maximum overvoltage level is exceeded permanent damage may occur. The solution for handling excessive regenerative energy with the NI C Series drive modules is to add more capacitance to the motor bus supply to absorb the regenerative energy. Details for calculating how much additional capacitance may be needed for your application are found in the Calculating Additional Capacitance section.
Determining the voltage rise on the capacitors can be quantified experimentally or mathematically.
Experimental Method
The simplest method for quantifying the voltage rise on the capacitors is to measure the motor bus voltage supply during deceleration events. Caution must be used with this approach as the voltage may rise to a level that causes permanent damage. The recommended approach is to begin with a slow speed then gradually increase velocity to match the application requirements while monitoring the motor supply.
If you experimentally determine the voltage rises to an unacceptable level then you will need to add more capacitance onto the motor bus supply. The amount of capacitance required can be found in the Calculating Additional Capacitance section.
Mathematical Method
To calculate the amount of regenerative energy the following information must be known:
| System Component | Overvoltage Detection | Maximum Allowable Voltage | Output Capacitance |
| NI PS-16 | 35 VDC | 40 VDC | 7000 μF |
| NI 9505 | 32VDC | 40 VDC | 750 μF (with NI 9931 accessory) 300 μF (without NI 9931 accessory) |
| NI 9501 | 32VDC | 40 VDC | 750 μF |
| NI 9502 | 32VDC | 40 VDC | 750 μF |
Table 1: System Component Specifications
The following example includes the components specified below:
NI 9502 Motor Drive Specifications
Output Capacitance 750 μF
NI AKM11E-ANCN2-00 Brushless Motor Specifications
Motor Terminal Resistance 3.11Ω
Torque Constant .064 Nm / A
Motor Rotor Inertia 1.7E-6 Kg-m2
NI PS-16 Power Supply Specifications
Output Voltage +24VDC
Output Capacitance 7000 μF
Load and Application Specifications
Maximum Velocity 2000 RPM
Deceleration Time 5 Seconds
Inertial Mismatch 20 (Load inertia is assumed to be 20 times greater than the motor rotor inertia)
Mechanical Efficiency .95 (Frictional losses due to the mechanical system such as gears, belts, etc.)
| Label | Unit | Description |
| ERegen | Joules | Regenerative energy generated during deceleration period |
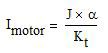
| Imotor | Amps | Motor current during deceleration period |
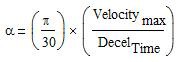
| α | Rad/Sec2 | Deceleration Rate |
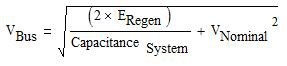
| VBus | Volts | Final voltage across motor bus capacitors during regeneration |
| VNominal | Volts | Nominal DC output voltage of the power supply |
| CapacitanceSystem | Farads | System Capacitance = power supply capacitance + motor drive capacitance |
| Velocitymax | Rev/min | Maximum speed |
| DecelTime | Seconds | Deceleration period |
| J | Kg-m2 | System inertia = rotor inertia * inertial mismatch |
| Kt | Nm / A | Motor torque constant |
| η | None | Efficiency of mechanical system (must be less than 1) |
| ECap | Joules | Energy stored by the system capacitance |
| CapacitanceAdditional | Farads | Additional capacitance required to absorb the regenerative energy |
| VoltageMax | Volts | Maximum motor bus voltage allowed during regeneration |
Formulas

Step 1
Calculate the deceleration rate:
= 41.89 radians / sec2
Step 2
Calculate the motor current:
= 0.02 Amps
Step 3
Calculate the regenerative energy not dissipated by the motor:

= 0.70 Joules
Step 4
Calculate the voltage that will be generated on the motor bus capacitance:
= 27.52 Volts
Step 5
Determine if the motor bus supply is too high.
Since 27.52V is less than the overvoltage detection level for both the NI 9502 and NI PS-16 there is no issue caused by the regenerative energy in this example.
In this example, no additional motor bus capacitance was required.
Calculating Additional Capacitance
Changing the inertial mismatch in the previous example from 20 to 100 results in Vbus equal to 37.95V. Since this is greater than the overvoltage detection level of 32V for the NI 9502 additional capacitance is required.
Step 1
Calculate the energy storage needed by the system capacitance:
=5.58 Joules
Step 2
Determine the maximum acceptable motor bus supply voltage.
In our case, we will allow the supply to rise up to +28V, which is well below the overvoltage detection threshold of the NI 9502 while providing guard band.
VoltageMax = 28V
Step 3
Calculate the additional capacitance required:
=14,232μF
Summary
This document details the process to calculating regenerative energy and additional capacitance required for the application. It demonstrates that lower inertial mismatches result in considerably lower regenerative energy. Moreover, lower inertial mismatch provides much better system response and stability. NI recommends an inertial mismatch of 10 or lower.