NI does not actively maintain this document.
This content provides support for older products and technology, so you may notice outdated links or obsolete information about operating systems or other relevant products.
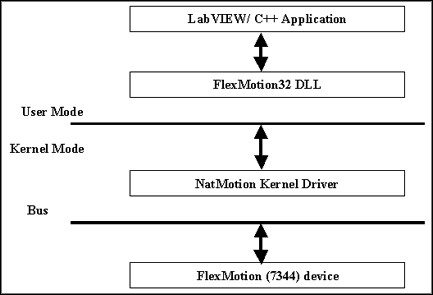
The following image shows how FlexMotion programs communicate with the FlexMotion board:
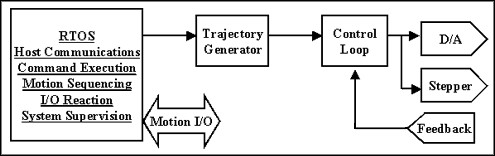
The basic components of a motion controller fall into three categories:
The following image shows the motion controller components and how they interact:
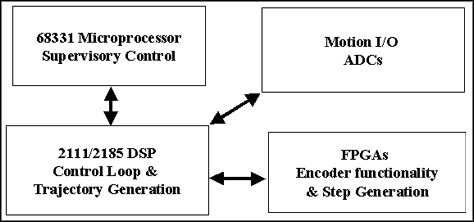
The FlexMotion board includes the following four components:
The following image shows the interaction of the different FlexMotion components:
The following sections describe the FlexMotion components in more detail.
The 68331 Microprocessor
The 68331 microprocessor has the following functions:
The Task or Thread priority is as follows:
The interrupt priority is as follows:
The onboard programs, which you download to the processor, have the following characteristics:
The DSP
The DSP has the following functions:
FPGAs
The FPGAs have the following functions:
Motion I/O
In addition to the I/O dedicated for motion, FlexMotion includes the following I/O components: