3D直交座標移動 (配列)
- 更新日2026-02-04
- 3分で読める
インストールパッケージ: Full or Professional Edition
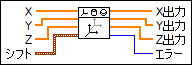
x軸、y軸、z軸に沿って三次元の直交座標をシフトします。 x入力にデータを配線して自動的に使用する多態性インスタンスを決定するか、インスタンスを手動で選択します。
入力/出力
 X
—
X
—
Xは入力x座標を指定します。
Y
—
Yは入力y座標を指定します。
Z
—
Zは入力z座標を指定します。  シフト
—
シフト
—
シフトは、各軸のシフト量を指定します。
 X出力
—
X出力
—
X出力はシフトされたx座標を返します。
Y出力
—
Y出力はシフトされたy座標を返します。
Z出力
—
Z出力はシフトされたz座標を返します。  エラー
—
エラー
—
エラーは、VIからのエラーまたは警告を返します。エラーは「エラーコードからエラークラスタ」VIに配線して、エラーコードまたは警告をエラークラスタに変換できます。 |
 dx
—
dx
—
以下の図は、dxとdyとdzによる3次元の直交座標のシフトを示しています。

シフト前のポイント P の座標は (x, y, z) です。シフト操作後のポイント P の座標は (x', y', z') で、以下の計算されます。
x' = x + dx y' = y + dy z' = z + dz