2D直交座標回転 (配列)
- 更新日2025-07-30
- 3分で読める
反時計回りに二次元の直交座標系を回転します。X入力にデータを配線して自動的に使用する多態性インスタンスを決定するか、インスタンスを手動で選択します。
メモ 本VIは、固定座標系内の点を回転させることは ありません 。原点を中心に座標系を回転させる。
入力/出力
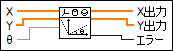
 X
—
X
—
Xは入力x座標を指定します。
Y
—
Yは入力y座標を指定します。  θ
—
θ
—
θは、回転角度をラジアンで指定します。  X出力
—
X出力
—
X出力は回転されたx座標を返します。
Y出力
—
Y出力は回転されたy座標を返します。  エラー
—
エラー
—
エラーは、VIからのエラーまたは警告を返します。エラーは「エラーコードからエラークラスタ」VIに配線して、エラーコードまたは警告をエラークラスタに変換できます。 |
次の図は、2次元の直交座標を反時計回りにθ(-π<θ≦π)だけ回転させたものである:

回転前のポイントPの座標は、(x, y)です。回転後のポイント P の座標は (x', y') です。

このとき、次の回転行列であるとします。
