GPIB待機関数
- 更新日2026-02-04
- 6分で読める
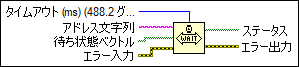
アドレス文字列で指定したデバイスが待ち状態ベクトルで指定した状態になるまで待機します。
デバイスがRQSをアサートするまで待機するには、GPIB RQS待機関数を使用します。
入力/出力
 タイムアウト (ms) (488.2 グローバル)
—
タイムアウト (ms) (488.2 グローバル)
—
タイムアウト (ms) は、関数がタイムタウトするまで待機する時間をミリ秒単位で指定します。 操作は、タイムアウト (ms) の制限時間内に完了しない場合は終了します。タイムアウトを有効にするには、待ち状態ベクトル入力にビット14を設定してください。タイムアウトを無効にするには、タイムアウト (ms) を0に設定します。 488.2を使用するには、この入力を未配線にします。次に「タイムアウト設定」関数を使用して、タイムアウト (ms) のデフォルト値を変更します。デフォルトは10000です。  アドレス文字列
—
アドレス文字列
—
アドレス文字列には、関数が通信を行うGPIBデバイスのアドレスが含まれています。 アドレス文字列には、プライマリ+セカンダリの形式を使用して、プライマリアドレスとセカンダリアドレスの両方を入力できます。プライマリとセカンダリの両方は10進数値であるため、たとえばプライマリが2でセカンダリが3の場合、アドレス文字列は2+3となります。 アドレスが指定されていない場合、関数は文字列を読み書きする前にアドレス指定を実行しません。別の方法でこれらのコマンドを送信したとみなすか、または、別のコントローラがコントローラインチャージでアドレス指定を実行するものとみなします。コントローラがデバイスのアドレスを指定することになっている場合でも、タイムリミットが切れる前にそのアドレス指定を実行しないと、関数はGPIBエラー6 (タイムアウト) で終了し、ステータスでビット14を設定します。GPIBがコントローラインチャージでない場合は、アドレス文字列を指定しないでください。 LabVIEWで使用できるGPIBコントローラが複数ある場合、「ID:アドレス」形式 (アドレスが不要な場合は「ID:」) のアドレス文字列の接頭辞で、特定の関数によって使用されるコントローラを決定します。たとえば、GPIBコントローラ2をアドレス3にトークするように設定するには、2:3の接頭辞を使用します。コントローラIDが存在しない場合、関数はコントローラ (またはバス) 番号0をデフォルトに設定します。  待ち状態ベクトル
—
待ち状態ベクトル
—
待ち状態ベクトル関数が待機中の状態を示します。 配列の各ブール要素は、デバイスが待機できる状態に対応します。複数の要素がTRUEに設定されている場合、いずれかの状態が発生すると、関数は終了します。 以下の表は、待ち状態ベクトルで指定可能な状態を定義します。この表には各要素の数値と説明も掲載されています。これらの要素はその他のGPIB関数が返す要素と同じですが、この関数ではリストされた状態のみが有効です。
 エラー入力
—
エラー入力
—
エラー入力は、このノードを実行する前に発生したエラーの状態を示します。この入力は、標準エラー入力として機能します。  ステータス
—
ステータス
—
ステータスは、各ビットがGPIBコントローラの状態を表すブール配列です。 エラーが発生すると、GPIB関数はビット15を設定します。GPIBエラーは、ステータスのビット15が設定されている場合のみ有効です。ステータスビットとGPIBエラーコードの詳細は、「GPIBステータス」関数を参照してください。 複数の状態を待機している場合、ステータスをチェックし、関数が終了した原因である状態を確認します。 LabVIEWがステータスのチェックと他の関数の実行を交互に行うため、この関数を他の関数と並行して実行できます。さらに、同時に異なるコントローラで異なる状態を待機したり、複数の状態を待機できるように、この関数への複数の呼び出しは同時に実行できます。  エラー出力
—
エラー出力
—
エラー出力には、エラー情報が含まれます。この出力は、標準エラー出力として機能します。 |