Programmation linéaire - méthode du simplexe
- Mise à jour2026-02-04
- Temps de lecture : 3 minute(s)
Requiert: Full or Professional Edition
Détermine la solution d'un problème de programmation linéaire.
Entrées/Sorties
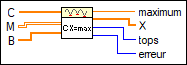
 C
—
C
—
C est un vecteur décrivant la fonction linéaire à maximiser.  M
—
M
—
M est une matrice décrivant les différentes contraintes.
B
—
B est un vecteur décrivant les membres de droite des inégalités de contraintes.  maximum
—
maximum
—
maximum est la valeur maximale, si elle existe, de x sous les contraintes.  X
—
X
—
X est le vecteur solution.  tops
—
tops
—
tops est le temps, en millisecondes, consacré à la totalité du calcul.  erreur
—
erreur
—
erreur renvoie toute condition d'erreur ou de mise en garde du VI. La non-existence d'une solution X donne lieu à une erreur. Vous pouvez câbler erreur au VI Convertir un code d'erreur en cluster d'erreur pour convertir le code d'erreur ou la mise en garde en cluster d'erreur. |
La formule suivante définit le problème d'optimisation résolu par ce VI.
cx = max!avec les contraintes x ≥ 0 et mx ≥ b.
Pour le problème d'optimisation cx = max!, utilisez les définitions suivantes :
X =(x1, ..., xn) C =(c1, ..., cn) B =(b1, ..., bk) M est une matrice kpar n.Pour résoudre le problème d'optimisation, vous devez décider s'il existe un vecteur optimal X. Si ce vecteur X existe, vous devez le déterminer.
La résolution d'un problème de programmation linéaire est un processus à deux étapes. Suivez les étapes suivantes pour résoudre un problème de programmation linéaire.
- En premier lieu, convertissez le problème d'origine en un problème sous forme normale restreinte, essentiellement sans inégalités dans la formulation.
- Résolvez la forme normale restreinte du problème.
Exemples
Reportez-vous aux fichiers d'exemple inclus avec LabVIEW.
- labview\examples\Mathematics\Optimization\Geometrical Analysis with Linear Programming.vi