三维直角坐标系旋转(欧拉角)(数组)
- 更新时间2025-07-30
- 阅读时长4分钟
使用欧拉角方法将三维直角坐标系按逆时针方向旋转,并返回给定点的新坐标。通过连线数据至X输入端可确定要使用的多态实例,也可手动选择实例。
输入/输出
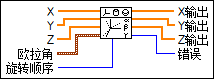
 X
—
X
—
X指定输入的x坐标。
Y
—
Y指定输入的y坐标。
Z
—
Z指定输入的z坐标。  欧拉角
—
欧拉角
—
欧拉角指定欧拉角,以弧度为单位。
 旋转顺序
—
旋转顺序
—
旋转顺序指定了旋转坐标的坐标轴的次序。 例如,X-Y-Z表示第一个、第二个和第三个旋转分别为x轴、y轴和z轴。Z-X-Z是默认次序。
 X输出
—
X输出
—
X输出返回旋转后的x坐标。
Y输出
—
Y输出返回旋转后的y坐标。
Z输出
—
Z输出返回旋转后的z坐标。  错误
—
错误
—
错误返回VI的任何错误或警告。将错误连接至错误代码至错误簇转换VI,可将错误代码或警告转换为错误簇。 |
 phi
—
phi
—
根据欧拉旋转理论,你可以用欧拉角j、θ和ψ来描述一个坐标旋转,如下图所示(以默认旋转顺序 Z-X-Z 为例):

旋转可描述为下列三个步骤:
- 将X轴、Y轴和Z轴绕Z轴旋转j(-π<j≤π),得到X'、Y'和Z轴。
- 将X'-、Y'-和Z轴围绕X'-轴旋转θ(0≤θ≤π),得到X'-、Y''-和Z'-轴。
- 将X''、Y''和Z''轴围绕Z''轴旋转ψ(-π < ψ ≤ π),得到X''、Y'''和Z''轴的结果。
如通过下列三个矩阵B, C和D表述点(x, y, z)的旋转:
 ;
;  ;
;  ,
,在新坐标系中,点的坐标(x', y', z')为

A = BCD。