三维直角坐标系旋转(方向余弦)(数组)
- 更新时间2025-07-30
- 阅读时长3分钟
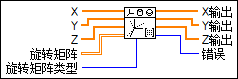
使用方向角方法将三维直角坐标系按逆时针方向旋转。通过连线数据至X输入端可确定要使用的多态实例,也可手动选择实例。
输入/输出
 X
—
X
—
X指定输入的x坐标。
Y
—
Y指定输入的y坐标。
Z
—
Z指定输入的z坐标。  旋转矩阵
—
旋转矩阵
—
旋转矩阵指定3 x 3的方向余弦矩阵。如旋转矩阵类型是方向余弦,则旋转矩阵中的每个元素必须在[-1, 1]的范围内。  旋转矩阵类型
—
旋转矩阵类型
—
旋转矩阵类型确定旋转矩阵是否包含方向角或方向余弦。
 X输出
—
X输出
—
X输出返回旋转后的x坐标。
Y输出
—
Y输出返回旋转后的y坐标。
Z输出
—
Z输出返回旋转后的z坐标。  错误
—
错误
—
错误返回VI的任何错误或警告。将错误连接至错误代码至错误簇转换VI,可将错误代码或警告转换为错误簇。 |
对于一个点 P,α、β和γ是矢量OP的方向角,如下图所示:

方向角的余弦为方向余弦。
旋转前,点P的坐标为(x, y, z)。旋转后,点P的坐标为(x', y', z')

A是旋转矩阵,其定义如下:

α1、β1和γ 1 是X'轴与X、Y和Z轴的方向角。α2、β2和γ 2是Y'轴与X、Y和Z轴的方向角。