PID输出率限制器(DBL数组)
- 更新时间2025-07-30
- 阅读时长4分钟
限制PID控制器输出变化率。使该VI紧随控制应用的PID VI之后。单控制循环可通过该VI的DBL实例实现。并行多循环控制可通过DBL数组实例实现。
输入/输出
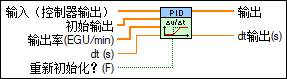
 输入(控制器输出)
—
输入(控制器输出)
—
输入(控制器输出)指定来自PID VI的当前控制输出值。
初始输出
—
初始输出指定VI第一次调用或初始化的输出值。该VI重新调整初始输出输入数组大小以匹配输入(控制器输出)输入数组的大小。
输出率(EGU/min)
—
输出率(EGU/min)指定控制器输出的最大变化率。该VI重新调整输出率(EGU/min)输入数组大小以匹配输入(控制器输出)输入数组的大小。  dt (s)
—
dt (s)
—
 重新初始化?(F)
—
重新初始化?(F)
—
重新初始化?指定是否重新初始化输出为初始输出值。  输出
—
输出
—
输出返回有限比率改变的当前控制输出。该VI根据输入(控制器输出)输入数组的大小确定输出数组的长度。  dt输出(s)
—
dt输出(s)
—
dt输出(s)返回实际的时间间隔,以秒为单位。dt输出(s)返回dt (s)的值,如果将dt (s)设置为–1,则返回计算的间隔。 |
该多态VI的DBL数组实例可用于多环PID控制应用。本例中输入(控制器输出)的长度确定输出数组的长度。其他输入数组的长度无需与输入(控制器输出)相同。该VI按如下方式将其他输入数组重新调整为输入(控制器输出)的长度:
- 如输入数组大于输入(控制器输出),则将输入数组截断为输入(控制器输出)的长度。不使用数组中的其他值。
- 如输入数组小于输入(控制器输出),则一直重复输入数组的最后一个值,直至与输入(控制器输出)的大小匹配。
这样,每个输出计算中必须使用的输入值无需在传递至该VI的数组中重复指定。相反,数组可仅包含一个用于输出计算的值。
范例
请参考LabVIEW附带的下列范例文件。
- labview\examples\control\PID\PID with Noise Plant.vi