PID 출력 속도 제한기(DBL 배열)
- 업데이트 날짜:2025-07-30
- 3분 (읽기 시간)
컨트롤러 출력의 변경 속도를 제한합니다. 컨트롤 어플리케이션에서 [PID] VI 바로 뒤에 이 VI를 놓습니다. 이 VI의 DBL 인스턴스를 사용하여 한 개의 컨트롤 루프를 구현합니다. 병렬 여러 루프 컨트롤을 구현하려면 DBL 배열 인스턴스를 사용합니다.
입력/출력
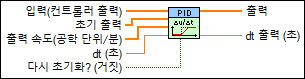
 입력(컨트롤러 출력)
—
입력(컨트롤러 출력)
—
입력(컨트롤러 출력)은 [PID] VI로부터의 현재 컨트롤 출력값을 지정합니다.
초기 출력
—
초기 출력은 이 VI의 첫번째 호출 또는 재초기화 시의 출력값을 지정합니다. 이 VI는 입력(컨트롤러 출력) 입력 배열의 크기와 맞도록 초기 출력 입력 배열의 크기를 조정합니다.
출력 속도(공학 단위/분)
—
출력 속도(공학 단위/분)는 컨트롤러 출력의 최대 변경 속도를 지정합니다. 이 VI는 입력(컨트롤러 출력) 입력 배열의 크기와 맞도록 출력 속도(공학 단위/분) 입력 배열의 크기를 조정합니다.  dt (초)
—
dt (초)
—
 다시 초기화? (거짓)
—
다시 초기화? (거짓)
—
다시 초기화?는 출력을 초기 출력값으로 다시 초기화할지 지정합니다.  출력
—
출력
—
출력은 속도 변경이 제한된 현재 컨트롤 출력을 반환합니다. 이 VI는 입력(컨트롤러 출력) 입력 배열의 크기에 근거하여 출력 배열의 길이를 결정합니다.  dt 출력 (초)
—
dt 출력 (초)
—
dt 출력(초)은 실제 시간 간격을 초 단위로 반환합니다. dt 출력(초)은 dt(초)를 –1로 설정하는 경우, dt(초)의 값 또는 계산된 간격을 반환합니다. |
여러 루프 PID 컨트롤 어플리케이션에서 이 다형성 VI의 DBL 배열 인스턴스를 사용합니다. 이 경우, 입력(컨트롤러 출력) 입력의 길이가 출력 배열의 길이를 결정합니다. 다른 입력 배열은 입력(컨트롤러 출력) 입력과 길이가 같을 필요는 없습니다. 이 VI는 다음과 같이 입력(컨트롤러 출력) 입력의 길이와 같도록 다른 입력 배열의 크기를 조정합니다:
- 입력 배열이 입력(컨트롤러 출력) 입력보다 긴 경우, 입력 배열은 입력(컨트롤러 출력) 입력의 길이와 같도록 잘라집니다. 배열 안에 있는 다른 값은 사용되지 않습니다.
- 입력 배열이 입력(컨트롤러 출력) 입력보다 짧은 경우, 입력(컨트롤러 출력) 입력의 길이와 같아질 때까지 이 입력 배열의 마지막 값을 반복합니다.
이렇게하면, 각 출력 계산에 사용해야 하는 입력값을 이 VI에 전달되는 배열 안에서 계속해서 지정하지 않아도 됩니다. 대신, 배열은 각 출력 계산에 사용하는 값 한 개로만 구성되어도 됩니다.
예제
LabVIEW 포함되는 다음 예제 파일을 참조하십시오.
- labview\examples\control\PID\PID with Noise Plant.vi