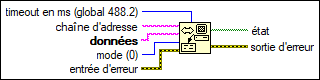
Fonction GPIB Write
- Mise à jour2026-02-04
- Temps de lecture : 5 minute(s)
Écrit des données dans le périphérique GPIB identifié par adresse.
Cliquez avec le bouton droit sur le nœud et sélectionnez Mode d'E/S synchrone»Synchrone dans le menu local pour écrire les données de manière synchrone.
Entrées/Sorties
 timeout en ms (global 488.2)
—
timeout en ms (global 488.2)
—
timeout en ms indique en millisecondes combien de temps la fonction attend avant de déclencher un timeout. L'opération est abandonnée si elle ne se termine pas dans les délais impartis par timeout en ms. Pour désactiver les timeouts, définissez timeout en ms à 0. Pour utiliser le timeout global 488.2, ne câblez pas timeout en ms ou définissez l'entrée à –1. Puis utilisez la fonction SetTimeOut pour changer la valeur par défaut de timeout en ms. La valeur par défaut est 10000.  chaîne d'adresse
—
chaîne d'adresse
—
chaîne d'adresse contient l'adresse du périphérique GPIB avec lequel la fonction communique. Vous pouvez entrer simultanément l'adresse primaire et l'adresse secondaire dans chaîne d'adresse en utilisant la forme primaire+secondaire. primaire et secondaire sont toutes deux des valeurs décimales ; par conséquent, si primaire est 2 et que secondaire est 3, chaîne d'adresse est égale à 2+3. Si vous ne spécifiez pas d'adresse, les fonctions n'effectuent pas d'adressage avant d'essayer de lire et d'écrire la chaîne. Elles supposent que vous avez envoyé ces commandes d'une autre façon ou qu'un autre contrôleur est en charge et de ce fait responsable de l'adressage. Si le contrôleur est censé effectuer l'adressage mais ne le fait pas dans les délais impartis, les fonctions s'interrompent avec une erreur GPIB de type 6 (timeout) et définissent le bit 14 à 1 dans état. Si le GPIB n'est pas le contrôleur en charge, ne spécifiez pas chaîne d'adresse. Lorsque LabVIEW peut utiliser plusieurs contrôleurs GPIB, un préfixe à chaîne d'adresse sous la forme ID:adresse (ou ID: si aucune adresse n'est nécessaire) détermine le contrôleur qui est utilisé par une fonction spécifique. Par exemple, pour définir le contrôleur GPIB 2 pour qu'il communique avec un périphérique à l'adresse 3, utilisez le préfixe 2:3. S'il n'existe pas d'ID contrôleur, la fonction prend par défaut la valeur contrôleur (ou bus) numéro 0.
données
—
données sont les données écrites par la fonction au périphérique GPIB.  mode (0)
—
mode (0)
—
mode indique comment terminer la fonction GPIB Write. Cette entrée accepte les valeurs suivantes.
 entrée d'erreur
—
entrée d'erreur
—
entrée d'erreur décrit les conditions d'erreur qui ont lieu avant l'exécution de ce nœud. Cette entrée fournit la fonctionnalité entrée d'erreur standard.  état
—
état
—
état représente un tableau de booléens dans lequel chaque bit décrit un état du contrôleur GPIB. Si une erreur se produit, la fonction définit le bit 15 à 1. erreur GPIB n'est valide que si le bit 15 d'état est défini à 1. Le tableau suivant présente la valeur numérique et l'état symbolique de chaque bit d'état. Ce tableau propose également une description de chaque bit.
 sortie d'erreur
—
sortie d'erreur
—
sortie d'erreur contient des informations sur l'erreur. Cette sortie fournit la fonctionnalité sortie d'erreur standard. |
Quand vous transférez des données à partir d'un driver de matériel ou vers lui de manière synchronisée, le thread d'appel est verrouillé pour la durée du transfert de données. En fonction de la vitesse du transfert, ceci peut gêner d'autres processus qui requièrent le thread d'appel. Toutefois, si une application nécessite que les données soient transférées aussi rapidement que possible, effectuer l'opération de manière synchrone dédie le thread d'appel exclusivement à cette opération.
Exemples
Reportez-vous aux fichiers d'exemple inclus avec LabVIEW.
- labview\examples\Instrument IO\GPIB\Simple GPIB.vi