ODE Linear nth Order Numeric VI
- Updated2025-07-30
- 4 minute(s) read
Solves an nth-order, homogeneous linear differential equation with constant coefficients in numeric form.
Inputs/Outputs
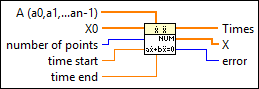
 A (a0,a1,...an-1)
—
A (a0,a1,...an-1)
—
A is the vector of coefficients of the different derivatives of a function x(t), starting with the coefficient of the lowest order term. The coefficient of the highest order derivative is assumed to be equal to 1.0 and does not need to be entered.
X0
—
X0 is the vector of the start condition x[10], …, x[n0]. There is a one-to-one relation between the components of X0 and X.  number of points
—
number of points
—
number of points is the number of equidistant time points between time start and time end. The default is 10.  time start
—
time start
—
time start is the start point of the ODE. The default is 0.
time end
—
time end is the end point of the time interval under investigation. The default is 1.0.  Times
—
Times
—
Times is an array representing the time steps. The method yields equidistant time steps between time start and time end.
X
—
X is the vector of the solution x at the equidistant time points as specified in the Times array.  error
—
error
—
error returns any error or warning from the VI. Errors are produced by using the wrong inputs X, X0, and F(X,t). You can wire error to the Error Cluster From Error Code VI to convert the error code or warning into an error cluster. |
Consider the nth-order linear homogeneous differential equation
x(n) + an – 1x(n – 1) + … + a1x(1) + a0x = 0with
x(0) = x00 x(1)(0) = x10 ⋮ x(n – 1)(0) = xn – 10where 0 represents the more general value of time start. There is a strong connection between the equation
x(n) + an – 1x(n – 1) + … + a1x(1) + a0x = 0and the zero finding problem
z n + an – 1z n – 1+ … + a1z + a0 = 0The n zeros of the last equation determine the structure of the solution of the ODE. If we have n distinct complex zeros λ1, …, λ n, the general solution of the nth-order differential equation can be expressed by
x(t) = β1exp(λ1t) + … + βnexp(λnt)The unknowns can be determined by the start condition
x(0) = β1 + … + βn x(1)(0) = β1λ1 + … + βnλn ⋮ x(n – 1)(0) = β1λ1n – 1 + … + βnλnn – 1The case of repeated eigenvalues λ1, …, λn is more complex and is not treated here. An error code of –23017 is given if this happens.
By convention, the value of the highest coefficient is taken as 1.0, and does not need to be entered in the A control. The other coefficients are entered starting with the lowest order coefficient.
To solve the differential equation
x'' – 3 x' + 2 x = 0with the I.C. as with x(0) = 2 and x'(0) = 3, enter A = [2, -3] and X0 = [2, 3].