Lineares ODE-System (numerisch)
- Aktualisiert2025-07-30
- 4 Minute(n) Lesezeit
Löst ein n-dimensionales homogenes lineares Differentialgleichungssystem mit konstanten Koeffizienten und gegebener Anfangsbedingung.
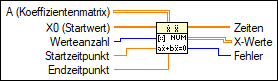
Ein-/Ausgänge
 A (Koeffizientenmatrix)
—
A (Koeffizientenmatrix)
—
A ist die (n, n)-Matrix, mit der das lineare System beschrieben wird.  X0 (Startwert)
—
X0 (Startwert)
—
X0 ist der Vektor n zur Beschreibung der Anfangsbedingung x[10], …, x[n0]. Zwischen X0 und X besteht eine eineindeutige Beziehung.  Werteanzahl
—
Werteanzahl
—
Werteanzahl ist die Anzahl der äquidistanten Zeitwerte zwischen Startzeitpunkt und Endzeitpunkt. Der Standardwert lautet 10.  Startzeitpunkt
—
Startzeitpunkt
—
Startzeitpunkt ist der Startpunkt der gewöhnlichen Differentialgleichung. Der Standardwert lautet 0.
Endzeitpunkt
—
Endzeitpunkt ist der Endpunkt des Zeitintervalls, das untersucht werden soll. Der Standardwert lautet 1,0.  Zeiten
—
Zeiten
—
Zeitwerte ist ein Array, das die Zeitschritte darstellt. Beim Euler-Verfahren werden dieselben Zeitschritte zwischen Startzeitpunkt und Endzeitpunkt verwendet.  X-Werte
—
X-Werte
—
X-Werte ist die Matrix der Lösung X an den äquidistanten Zeitpunkten.  Fehler
—
Fehler
—
Fehler gibt alle Fehler oder Warnungen des VIs aus. Fehler können durch falsche Eingaben für X, X0 und F(X,t) entstehen. Zur Umwandlung eines Fehlercodes oder einer Warnung in einen Fehler-Cluster verbinden Sie Fehler mit dem VI Fehler-Cluster aus Fehlercode. |
Die Lösung des VIs basiert auf der Bestimmung der Eigenwerte und -vektoren der zugrundeliegenden Matrix A und wird in Form von Zahlenwerten angezeigt.
Lineare Systeme können wie folgt beschrieben werden:
 X(0) = X0
X(0) = X0bei Startzeitpunkt= 0.
Hier gilt:
X(t) = (x0(t), …, xn(t))und A ist eine reelle (n, n)-Matrix. Das lineare System kann durch Bestimmen der Eigenwerte und -vektoren von A gelöst werden. S steht für alle Eigenvektoren, die über den gesamten n-dimensionalen Bereich aufgespannt sind. Durch die Transformation Y(t) = SX(t) ergibt sich
 Y(0) = SX0
Y(0) = SX0Die Matrix SAS–1 ist diagonal, daher liegt die Lösung auf der Hand. Die Lösung X(t) kann durch Rücktransformation bestimmt werden:
X(t) = S–1Y(t)In folgender Abbildung sind die vier Komponenten der Lösung der linearen Differentialgleichung dargestellt, die durch das folgende System beschrieben wird:
mit
x1(0) = 1 x2(0) = 2 x3(0) = 3 x4(0) = 4
In der nachfolgenden Parameterliste sehen Sie, wie die Gleichung auf dem Frontpanel einzugeben ist:
- A: [–7, –6, 4, 1; –6, 2, 1, –2; 4, 1, 0, 2; –1, –2, 2, –7]
- X0: [1, 2, 3, 4]
- Startzeitpunkt: 0,00
- Endzeitpunkt: 1,00