PID - Online-Selbstoptimierung (Sprungtest in offener Regelstrecke)
- Aktualisiert2025-07-30
- 5 Minute(n) Lesezeit
Bestimmt die Parameter eines PID-Reglers nach auf dem Selbstoptimierungsverfahren, das durch Auswahl einer Instanz dieses VIs festgelegt wird. Dieses VI kann zusammen mit anderen PID-VIs wie PID oder PID - Fortgeschritten zum Erzeugen und Optimieren eines PID-Reglers genutzt werden. Die polymorphe Instanz muss manuell ausgewählt werden.
Ein-/Ausgänge
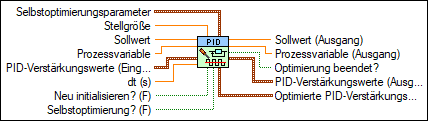
 Selbstoptimierungsparameter
—
Selbstoptimierungsparameter
—
Selbstoptimierungsparameter gibt verschiedene Parameter für die Selbstoptimierung an.
 Stellgröße
—
Stellgröße
—
Stellgröße gibt eine Menge oder einen Zustand an, der in Abhängigkeit von der Regelabweichung variiert und dadurch den Wert der direkt geregelten Größe ändert. Die Stellgröße entspricht der Reglerausgabe.
Sollwert
—
Sollwert gibt den Sollwert der Prozessvariablen an.
Prozessvariable
—
Prozessvariable gibt den gemessenen Wert der geregelten Prozessvariable an. Dieser Wert entspricht dem Rückkopplungswert einer rückgekoppelten Regelschleife.
PID-Verstärkungswerte (Eingang)
—
PID-Verstärkungswerte (Eingang) gibt die proportionale Verstärkung, die Nachstellzeit und die Vorhaltzeit des Reglers an.
dt (s)
—
dt (s) gibt das Intervall in Sekunden an, in dem das VI aufgerufen wird. Wenn dt (s) kleiner oder gleich 0 ist, arbeitet das VI mit einem internen Timer mit einer Auflösung von 1 ms. Der Standardwert lautet –1. Verwenden Sie in diesem VI den gleichen Wert für dt (s) wie in den VIs PID oder PID Advanced.  Neu initialisieren? (F)
—
Neu initialisieren? (F)
—
Neu initialisieren? gibt an, ob die internen Parameter (wie der Integrationsfehler des Reglers) neu initialisiert werden sollen. Setzen Sie Neu initialisieren? auf TRUE, wenn Ihre Anwendung in der Lage sein muss, die Regelschleife zu stoppen und neu zu starten, ohne selbst ihre Ausführung beenden zu müssen. Die Standardeinstellung lautet FALSE.
Selbstoptimierung? (F)
—
Selbstoptimierung? gibt an, dass mit der Selbstoptimierung begonnen werden soll. Dieser Eingang ist mit einem booleschen Element zu verbinden, dessen Standardeinstellung FALSE ist und dessen Schaltverhalten auf "Latch" eingestellt ist. Die Standardeinstellung lautet FALSE.  Sollwert (Ausgang)
—
Sollwert (Ausgang)
—
Sollwert (Ausgang) gibt den neuen Sollwert aus.
Prozessvariable (Ausgang)
—
Prozessvariable (Ausgang) gibt den Wert der Prozessvariablen aus. Wenn Selbstoptimierung? TRUE ist, gibt dieser Anschluss 0 aus.  Optimierung beendet?
—
Optimierung beendet?
—
Optimierung beendet? gibt nach Abschluss der Selbstoptimierung TRUE aus. Anhand dieses Ausgangswerts lässt sich der Aktualisierungszeitpunkt der PID-Verstärkungswerte (Eingang) bestimmen.  PID-Verstärkungswerte (Ausgang)
—
PID-Verstärkungswerte (Ausgang)
—
PID-Verstärkungswerte (Ausgang) gibt die aktualisierten PID-Verstärkungsparameter nach der automatischen Feinabstimmung aus. Normale Ausgangswerte sind mit den Werten in PID-Verstärkungswerte (Eingang) identisch.
Optimierte PID-Verstärkungswerte
—
Optimierte PID-Verstärkungswerte gibt die proportionale Verstärkung, die Nachstellzeit und die Vorhaltzeit des Reglers aus.
|
 Reglertyp
—
Reglertyp
—
 Relaiszyklen
—
Relaiszyklen
—
Beispiele
Die folgenden Beispieldateien sind in LabVIEW enthalten.
- labview\examples\control\PID\Autotuning PID Online and Inline.vi