Innovaciones en la validación de ADAS/AD: La evolución de las arquitecturas HIL en Valeo con NI
Martin Zmrhal, líder del equipo de desarrollo de herramientas de software, Valeo
Brenda Vargas, Marketing de soluciones sénior, unidad de negocios de transporte, NI
Aspectos destacados del caso de estudio
- La evolución de los sistemas HIL es esencial para cumplir con los cambiantes requisitos de las nuevas tecnologías y lograr el objetivo de tener vehículos más seguros en las carreteras.
- El equipo de Valeo DVS utilizó tres arquitecturas HIL a lo largo del tiempo, cada una con capacidades únicas para cumplir con la creciente complejidad de ADAS/AD.
- La colaboración NI-Valeo avanza en la validación de ADAS con sistemas NI PXI estandarizados, asegurando la satisfacción de los OEM en la dinámica industria automotriz.
"En Valeo, creemos que las habilidades, la alineación de software/hardware y la consistencia de la plataforma son las claves para cubrir los desafiantes requisitos de validación de ADAS. Y estamos seguros de que NI y la plataforma NI PXI nos darán lo que necesitamos para seguir el ritmo de los desafíos de la industria y mantener contentos a nuestros clientes al cumplir con las expectativas."
—Martin Zmrhal, líder del equipo de desarrollo de herramientas de software, Valeo
El desafío
Los sistemas ADAS y AD son cada vez más complejos y las arquitecturas HIL tradicionales ya no pueden satisfacer las necesidades de la industria. Valeo necesitaba un sistema HIL que pudiera proporcionar el rendimiento, la precisión y la escalabilidad necesarios para satisfacer las necesidades actuales y futuras.
La solución
El equipo de Valeo DVS utilizó la nueva arquitectura HIL de NI basada en la plataforma NI PXI además de la tecnología RDMA. La nueva arquitectura ofrece estandarización, rendimiento y precisión, lo que les permite desarrollar e implementar sistemas HIL de manera más rápida y eficiente, además de garantizar la seguridad y fiabilidad de los sistemas ADAS/AD.
En el corazón de la revolución de la movilidad
La búsqueda por reemplazar a los conductores humanos con sistemas autónomos avanzados promete una mayor productividad, mayor comodidad y menos accidentes en nuestras carreteras. Sin embargo, este ambicioso objetivo conlleva una serie de desafíos y preocupaciones, particularmente relacionados con problemas críticos de fallas del sistema y seguridad. Lograr niveles más altos de automatización de vehículos exige pruebas exhaustivas en un número casi infinito de escenarios del mundo real.
Para abordar este desafío, las compañías automotrices se esfuerzan por desarrollar continuamente tecnologías y estrategias de pruebas de validación. Una de esas compañías es Valeo, líder mundial en soluciones de tecnología automotriz. Valeo ha jugado un papel pionero en dar forma al panorama de la electrificación, los sistemas de asistencia avanzada al conductor (ADAS) y la conducción autónoma (AD). Con un legado de innovación y el compromiso de ofrecer soluciones de vanguardia, la colaboración de Valeo con NI evoluciona continuamente hacia un futuro más seguro.
Descripción general de ADAS y estacionamiento automatizado (AP)
A medida que crece la complejidad del sistema ADAS, se vuelve cada vez más difícil probar estos sistemas solo en vehículos reales. La validación virtual es una tendencia de la industria, impulsada por la necesidad de reducir el tiempo de las pruebas, los costos y la capacidad de probar escenarios extremos que son desafiantes en condiciones del mundo real.
Este desafío es particularmente cierto en los sistemas AP, que se basan en la fusión de sensores para crear un mapa virtual del entorno del vehículo para permitir maniobras de estacionamiento autónomas. Dada la complejidad de estos sistemas, se requiere una extensa validación, que involucra miles de casos de pruebas con cada versión de software. Sin embargo, probar todo el sistema en el vehículo objetivo generalmente es imposible debido a la falta de disponibilidad del vehículo antes del lanzamiento al mercado.
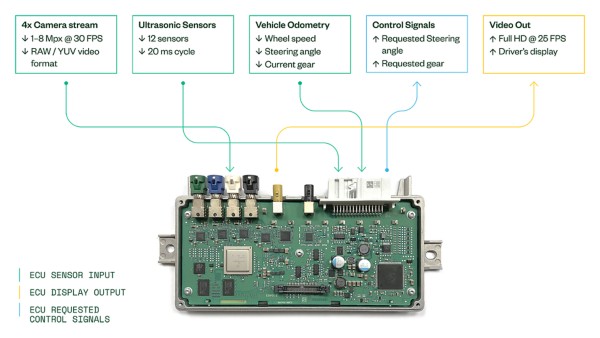
Figura 1: Arquitectura de la ECU de estacionamiento automatizado de Valeo
Para superar los desafíos, el equipo de sistemas de visión de conducción (DVS) de Valeo utiliza un enfoque de pruebas integral basado en tecnología de hardware-in-the-loop (HIL) de ciclo abierto y ciclo cerrado. Este enfoque implica realizar pruebas del software que se ejecuta en la unidad de control electrónico (ECU) fuera del vehículo, utilizando un banco de pruebas dedicado dentro del entorno de laboratorio:
- HIL de reproducción de ciclo abierto—Este método implica inyectar datos pregrabados de la carretera real en la ECU. Se utiliza principalmente para probar algoritmos de visión artificial y velocidades de detección.
- HIL virtual de ciclo cerrado—Los datos del sensor sintético se generan y se alimentan a la ECU. Esta configuración permite la retroalimentación de la ECU para simular el comportamiento del vehículo con precisión.
Si bien las pruebas en vehículos proporcionan dinámicas y entornos del mundo real, son costosas, requieren mucho tiempo y están sujetas a varias restricciones. Por otro lado, las pruebas HIL virtuales ofrecen ventajas en términos de escalabilidad, automatización y rentabilidad, pero carecen del realismo de los escenarios del mundo real. Es importante tener en cuenta que a medida que aumenta la fidelidad de su entorno de simulación, más se acercan sus pruebas HIL a la realidad.
El papel de Valeo DVS
Valeo DVS juega un papel crucial en el desarrollo de sistemas de visualización envolvente para vehículos, utilizando cámaras automotrices con lentes de ojo de pez, sensores ultrasónicos y ECUs. Estos sistemas son parte de las funciones de AP y asistencia al conductor. El equipo de herramientas e infraestructura de pruebas de Valeo es responsable de proporcionar herramientas de validación a lo largo del ciclo de vida del desarrollo del producto, desde el diseño de I&D hasta el registro en el vehículo, las pruebas HIL y las pruebas de fin de línea (EOL) en producción.
Evolución de las arquitecturas HIL en la validación ADAS/AD
El panorama dinámico en esta área ha impulsado la evolución continua de las arquitecturas HIL. Estos sistemas se han adaptado para satisfacer las cambiantes necesidades de la industria, garantizando que permanezcan a la vanguardia de los nuevos avances tecnológicos y los requisitos en constante expansión.
Actualmente, el equipo de Valeo DVS utiliza tres arquitecturas HIL diferentes y desarrolladas en colaboración con NI, cada una de las cuales aporta capacidades de prueba únicas.
HIL basada en interfaz de extensión multisistema (MXI)
Esta primera generación del sistema HIL desarrollado por el equipo de Valeo DVS utiliza un motor de simulación interno llamado Vosstrex, que se adapta al conjunto de sensores de Valeo. El sistema consta de un conjunto de modelos de una cámara de ojo de pez y sensores ultrasónicos, que alimentan los datos sintéticos desde la PC de simulación basada en Windows al sistema NI PXI y la ECU.
Específicamente en el sensor de la cámara, representan los datos sintéticos del motor de simulación; los datos pasan a través de una comunicación entre procesos a una aplicación de LabVIEW al sistema NI PXI usando MXI Express. En el sistema PXI, los FPGAs FlexRIO actúan como interfaz entre el software y el hardware, emulando señales de cámara auténticas y datos de bajo nivel que luego se suministran a la ECU.
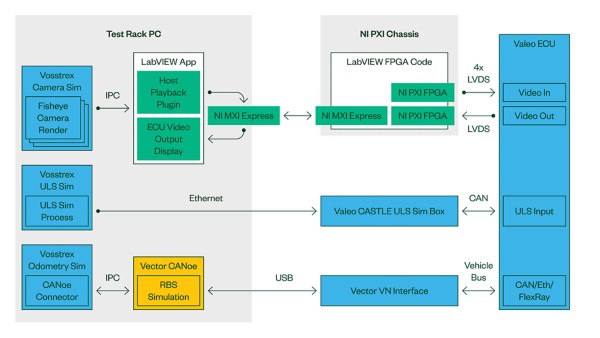
Figura 2: Diagrama de arquitectura HIL basada en ciclo cerrado MXI
La arquitectura es particularmente adecuada para el caso de uso principal, que involucra maniobras de baja velocidad como estacionamiento, lo que la hace adecuada para sus necesidades específicas. Además, su simulación Vosstrex, si bien proporciona suficiente fidelidad visual, ofrece una base sólida para futuras mejoras.
Sin embargo, esta arquitectura enfrenta ciertos desafíos. El principal son las limitaciones de rendimiento de la interfaz MXI, que restringen las velocidades de transferencia de datos. Además, la ausencia de sincronización del tiempo entre los tres componentes clave (cámaras, datos ultrasónicos y métricas del vehículo) plantea otra limitación. A pesar de estos desafíos, el sistema sigue siendo funcional para las aplicaciones de baja velocidad previstas y los avances en los motores de simulación de terceros ofrecen oportunidades para simulaciones aún más realistas en el futuro.
Actualmente, Valeo tiene alrededor de 50 probadores HIL que brindan soporte a nueve sitios de Valeo en todo el mundo, proporcionando pruebas para más de 12 proyectos OEM. Este sistema HIL ayudó a establecer un framework de validación del sistema en una etapa temprana del proyecto y proporcionó la propiedad total del código fuente a Valeo. Gracias a su capacidad para desarrollar en LabVIEW, pueden continuar realizando mejoras en todo el sistema, incluyendo la implementación de FPGA y el motor de simulación, a medida que los proyectos continúan evolucionando.

Figura 3: Granja HIL en la sede de Valeo
HIL Basado en HDMI
La necesidad de evolucionar el sistema de arquitectura HIL basado en MXI surgió por un requisito de un OEM europeo premium. Parte de los requisitos eran simular 12 cámaras de alto megapíxel, lo que significaba cuadruplicar el ancho de banda del sistema anterior y utilizar dos motores de simulación diferentes que operan en Linux. Al colaborar con NI, Valeo diseñó una solución que cumplía con estos criterios.
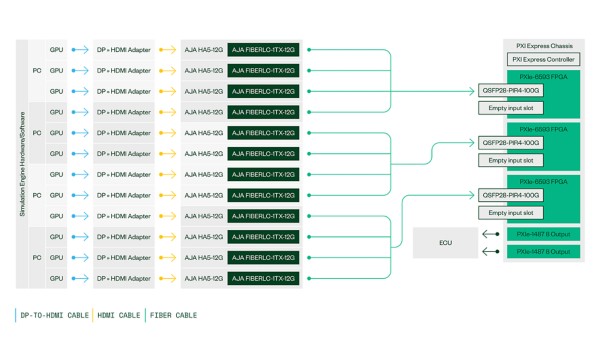
Figura 4: Arquitectura de simulación de doce cámaras
La configuración en la Figura 4 emplea cuatro PCs y 12 tarjetas gráficas, con cada GPU dedicada a simular una cámara individual. Una PC basada en Linux ejecuta la simulación, ejecutando el modelo de sensor de cámara para cada una de esas 12 cámaras. Las salidas físicas de la GPU están conectadas a los FPGAs PXI mediante conexiones HDMI, lo que implica varias conversiones en esta ruta de transmisión. Específicamente, incluye una conversión inicial de HDMI a interfaz digital serial (SDI), seguida de una conversión posterior de SDI a MIPI CSI. Se introduce un FPGA adicional en el flujo de trabajo para facilitar este proceso de conversión. Una vez que se completan estas conversiones, los datos se pueden alimentar a la interfaz de video automotriz para FPD-Link III (PXIe-1486) y GMSL2 (PXIe-1487), y los FPGAs sirven como las interfaces cruciales de software a hardware responsables de emular las señales del sensor que actúan como entradas a la ECU.

Figura 5: Simulación de sensor de cámara basada en HDMI
En términos de ancho de banda, el sistema funciona a una velocidad de 4.5 gigabytes por segundo para inyectar datos de video en la ECU. Una ventaja notable de esta configuración es su agnosticismo de simulación. Si bien en este caso se utiliza el motor de simulación basado en Linux, la misma ruta de datos podría admitir datos de otros proveedores de simulación. El FPGA adicional requerido para la conversión HDMI->SDI agrega costo, pero también agrega la capacidad para un mayor procesamiento de datos de imagen en esta nueva ruta de datos.
Sin embargo, esta configuración viene con ciertas limitaciones. En primer lugar, la interfaz HDMI presenta desafíos, que requieren una herramienta de conversión bastante compleja para hacer la transición de HDMI a SDI y luego a CSI. Básicamente, comparte una limitación similar con la configuración anterior en la que no hay sincronización entre los datos de la cámara y los ultrasonidos o simulación adicional del bus del vehículo. Lo que es más importante, este sistema HIL no se puede emplear de manera efectiva como un HIL de reproducción de ciclo abierto, lo que lo hace inadecuado para reproducir datos pre-capturados usando las GPUs.
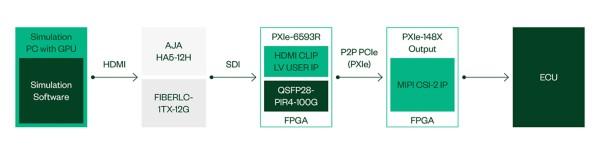
Figura 6: Arquitectura de canalización de inyección de video
HIL basado en RDMA
La última generación ofrecida por NI se conoce como el sistema RDMA HIL que utiliza acceso directo a memoria remota a través de Ethernet convergente (RoCE). Este sistema está construido sobre RDMA, una interfaz empleada para el intercambio de datos sin problemas entre la PC principal y NI PXI. RDMA establece una conexión basada en Ethernet que facilita la transferencia de datos de video con baja latencia, alto ancho de banda y elimina la necesidad de copias de memoria al permitir un enlace directo entre la memoria de la PC y la memoria del controlador PXI en tiempo real. Desde una perspectiva arquitectónica de alto nivel, el flujo de datos comienza con la PC de simulación, transmitida a través de RDMA al controlador PXI en tiempo real ubicado dentro de un chasis PXI que aloja los FPGAs necesarios responsables de alimentar la ECU. Este sistema puede funcionar como configuración de ciclo abierto y ciclo cerrado, lo que permite que la reproducción de datos pre-capturados y la retroalimentación, se integren nuevamente en el controlador en tiempo real.
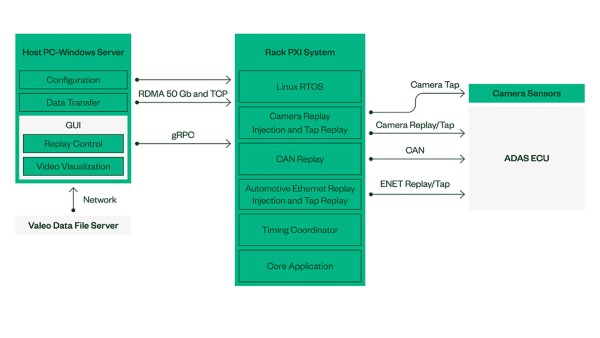
Figura 7: HIL de reproducción de ciclo abierto RDMA
Esta arquitectura ofrece el rendimiento más alto observado hasta el momento, con un solo módulo RDMA capaz de proporcionar hasta 6.25 gigabytes por segundo de transferencia de datos. Otra ventaja significativa radica en la arquitectura unificada para configuraciones HIL de ciclo abierto y ciclo cerrado, donde la distinción gira principalmente en torno a la selección de la fuente de datos, ya sea que se origine a partir de archivos de almacenamiento o simulación, lo que permite la reutilización. Sin embargo, la principal ventaja radica en la introducción de mecanismos de sincronización precisos, que alinean los datos de video a la perfección con las señales del bus del vehículo. Esta sincronización se extiende más allá de las cámaras para cubrir varios sensores, proporcionando un conjunto de datos completo y sincronizado. Valeo, por ejemplo, está evaluando activamente la incorporación de estos sistemas HIL, reemplazando potencialmente a los MXI HIL existentes como parte de su estrategia futura.
Sin embargo, hay algunos factores a considerar al usar RDMA. Su motor de simulación debe ser compatible con RDMA, lo que requiere llamar a una DLL de biblioteca de cliente RDMA desde el motor de simulación. En los casos en que no sea factible integrar una DLL externa con su motor de simulación, una alternativa es emplear convertidores HDMI a RDMA. Este enfoque esencialmente crea una configuración híbrida que combina elementos de la configuración anterior, pero con la advertencia de introducir latencia y fluctuación adicionales, debido al paso de conversión adicional (HDMI a RDMA).
Una solución integral: Kit de desarrollo de software (SDK) NI AD
El sistema HIL basado en NI RDMA está diseñado para ser independiente del simulador y cumplir con todos los requisitos del cliente. Esta versatilidad es posible gracias a la utilización del kit de desarrollo de software (SDK) NI AD. El SDK facilita una rápida integración entre la emulación de bus de sensores y el software de simulación. El AD SDK proporcionado es un conjunto de complementos que ofrecen una interfaz consistente, lo que simplifica la integración entre el proveedor del simulador y el sistema AD HIL. Aprovechando el soporte de LabVIEW y gRPC, el SDK proporciona una API de simulación, que ofrece una interfaz bien definida para una integración perfecta. Este enfoque permite a las compañías de simuladores de terceros trabajar con sus herramientas familiares, lo que les permite crear puntos de prueba sencillos que soportan la depuración y los procesos de CI/CD. Esto, a su vez, contribuye a la reducción de la complejidad de la comunicación del sistema entre el software de simulación y el sistema ADAS HIL, lo que le da al usuario final el poder de elegir qué proveedor de simulador utilizar.
Colaboración de NI y Valeo
La asociación entre NI y Valeo consiste en colaboración de I&D, acceso anticipado a prototipos de NI, servicios de ingeniería y desarrollo de sistemas HIL listos para usar. Esta colaboración ha permitido a Valeo mantenerse a la vanguardia de la validación de ADAS.
La plataforma NI PXI permitió al equipo de Valeo crear sistemas de validación estandarizados en todo el mundo y reutilizar componentes de pruebas aprovechando la modularidad, la sincronización precisa del tiempo y el soporte para interfaces automotrices esenciales que proporciona la plataforma.
Conclusión
La evolución de los sistemas HIL en Valeo, en colaboración con NI, muestra la importancia de adaptar las metodologías de pruebas para enfrentar los desafíos que surgen por sistemas ADAS/AD cada vez más complejos. El sistema HIL basado en RDMA representa un importante paso adelante, ofreciendo capacidades de alto rendimiento y sincronización. Valeo mantiene su compromiso de aprovechar los sistemas de NI para abordar las cambiantes necesidades de la validación ADAS/AD, garantizando la satisfacción de sus clientes en la industria automotriz.
La marca comercial registrada Linux® se utiliza conforme a una sublicencia otorgada por LMI, el licenciatario exclusivo de Linus Torvalds, propietario de la marca en todo el mundo.
Un partner de NI es una entidad comercial independiente de NI y no tiene agencia o relación de empresa conjunta con NI y no forma parte de ninguna asociación comercial con NI.