ADAS/AD验证创新:法雷奥与NI合作开发HIL架构
案例分析要点
- 对于满足不断变化的新技术要求和实现更安全车辆驾驶的目标,HIL系统的发展至关重要。
- 在此期间,法雷奥DVS团队使用了3种HIL架构,每种架构都具有独特的功能,从而应对日益复杂的ADAS/AD。
- NI与法雷奥协同合作,通过标准化的NI PXI系统推进ADAS验证,确保OEM在瞬息万变的汽车行业中称心如意。
“在法雷奥,我们认为技能、软件/硬件一致性和平台一致性是从容面对挑战性ADAS验证需求的关键。我们相信,NI和NI PXI平台会帮助我们应对行业挑战,并通过满足期望让客户满意。”
-法雷奥软件工具开发团队负责人,Martin Zmrhal
挑战
随着ADAS和AD系统日益复杂,传统HIL架构已无法满足行业需求。法雷奥需要一个在性能、精度和可扩展性上都能满足当前和未来需求的HIL系统。
解决方案
法雷奥DVS团队使用了NI的全新HIL架构,该架构基于NI PXI平台和RDMA技术。新架构兼具标准化、高性能和准确性,使团队在更快速、高效地开发和部署HIL系统的同时,保证ADAS/AD系统的安全性和可靠性。
汽车行业变革势在必行
使用先进的自动驾驶系统取代人类驾驶员,有望提高生产力、增强舒适性,并减少道路事故。然而,这一雄心勃勃的目标也伴随着挑战和担忧,特别是与系统故障和安全相关的关键问题。要实现更高水平的车辆自动化,就需要针对无数真实场景进行全面测试。
汽车企业为应对这一挑战,正努力开发技术并验证测试策略。汽车技术解决方案的全球领导者法雷奥便是其中之一。法雷奥在推动电气化、高级驾驶辅助系统(ADAS)和自动驾驶(AD)领域发展过程中发挥了先锋作用。法雷奥秉承创新传统,致力于提供尖端解决方案,其与NI的合作正朝着更安全的未来飞速前进。
ADAS和自动泊车(AP)概述
随着ADAS系统日益复杂,仅使用真实车辆进行测试变得极具挑战性。对减少测试时间和成本的需求,以及对真实条件下具有挑战性的极端场景进行测试的能力,使虚拟验证成为一种必然的行业趋势。
此类挑战在AP系统中尤为突出,因为该系统依靠传感器融合来创建车辆周围环境的虚拟地图,从而实现自动泊车操作。考虑到这些系统的复杂性,需对其进行广泛的验证,其中每个软件版本都涉及数千个测试用例。然而,由于目标车辆在上市前通常不可用,因此无法测试整个系统。
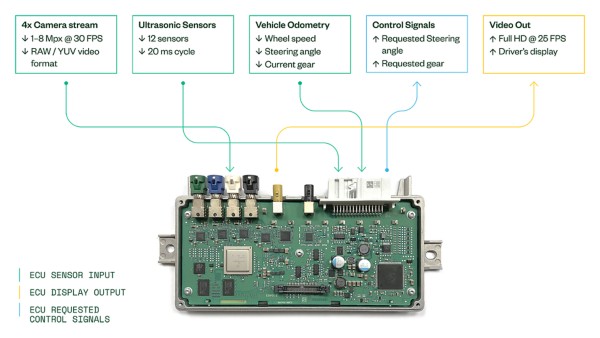
图1: 法雷奥自动泊车ECU架构
法雷奥驾驶视觉系统(DVS)团队为克服这些挑战,采用了基于开环和闭环硬件在环(HIL)技术的综合测试方法。该方法涉及利用实验室环境中的专用测试台,对在车辆外部电子控制单元(ECU)中运行的软件进行测试:
- 开环回放HIL-该方法会将预先记录的真实道路数据注入ECU。主要用于测试计算机视觉算法和检测率。
- 闭环虚拟HIL-生成合成传感器数据并将其输入ECU。该设置支持来自ECU的反馈,以准确仿真车辆行为。
一方面,车载测试提供了真实的动态和环境,但成本高昂又耗费时间,而且存在各种限制。另一方面,虚拟HIL测试在可扩展性、自动化和成本效益方面具有优势,但缺乏实际场景的真实性。需要注意的是,HIL测试会随着仿真环境保真度的提高越来越接近现实。
法雷奥DVS的作用
法雷奥DVS利用带鱼眼镜头的汽车相机、超声波传感器和ECU,在开发汽车全景影像系统方面发挥着至关重要的作用。这些系统是AP和驾驶员辅助功能的一部分。法雷奥的测试工具和基础架构团队负责在整个产品开发生命周期中提供验证工具,包括从研发设计到车载记录、HIL测试以及生产中的生产线终端(EOL)测试。
ADAS/AD验证中HIL架构的发展
在该领域中,动态景观推动HIL架构不断发展。这些系统已适应了行业不断变化的需求,可确保始终处于新技术进步和日益增长的需求的前沿。
目前,法雷奥DVS团队与NI合作开发了3种不同的HIL架构,且每种架构都具有独特的测试功能。
基于多系统扩展接口(MXI)的HIL
法雷奥DVS团队开发的第一代HIL系统使用了一款名为Vosstrex的内部仿真引擎,该引擎专为法雷奥的传感器组而设计。该系统由一组鱼眼相机和超声波传感器模型组成,可将Windows仿真PC的合成数据传输至NI PXI系统和ECU。
尤其是相机传感器可以渲染来自仿真引擎的合成数据;使用MXI Express可以将数据通过进程间通信传输至LabVIEW应用,再传输至NI PXI系统。在PXI系统中,FlexRIO FPGA充当软件和硬件之间的接口,以仿真真实相机信号和底层数据,并将其提供给ECU。
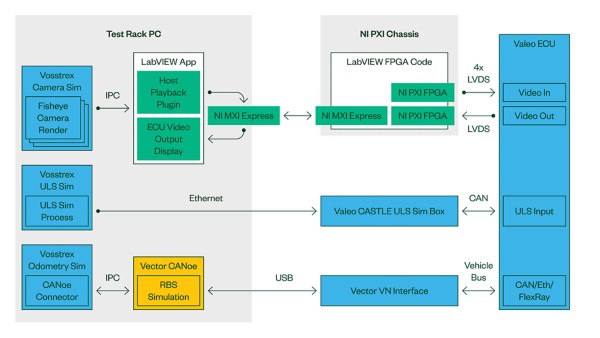
图2: 基于闭环MXI的HIL架构图
该架构可有效用于包括停车等低速操作在内的主要用例,以使其满足特定需求。此外,Vosstrex仿真在提供足够的视觉保真度的同时,为进一步增强效果奠定了坚实基础。
但这种架构确实面临一些挑战。首先是MXI接口的吞吐量限制了数据传输速率。其次,相机、超声波数据和车辆指标这3个关键部分之间缺乏时间同步性。尽管存在这些挑战,但该系统仍能满足其预期的低速应用需求,并且第三方仿真引擎的发展也为未来实现更真实的仿真提供了可能性。
目前,法雷奥拥有约50台HIL测试仪,这些测试仪为法雷奥全球9个生产基地提供支持,并且为超过12个原始设备制造商(OEM)项目提供测试服务。该HIL系统有助于法雷奥在项目早期阶段建立系统验证框架,并拥有全部源代码的所有权。得益于LabVIEW的开发功能,法雷奥可随着项目发展继续提升整个系统,包括FPGA实现和仿真引擎。

图3:法雷奥工厂的HIL集群
基于HDMI的HIL
一家欧洲顶级OEM的需求推动了基于MXI的HIL架构系统的发展。其中一些需求是要仿真12台高像素相机,这意味着所需带宽是以前系统的4倍,并要利用2个运行在Linux中的不同仿真引擎。法雷奥通过与NI合作,构建了满足上述标准的解决方案。
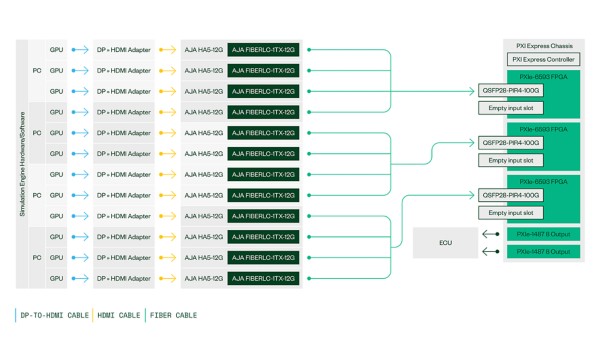
图4: 12台相机仿真架构
图4中的配置使用了4台PC和12个显卡,每个GPU专用于仿真一台相机。由基于Linux的PC执行仿真,为12台相机中的每一台运行相机传感器模型。使用HDMI连接可将物理GPU输出连接至PXI FPGA,传输路径中涉及多个转换。具体来说,其中包括从HDMI到数字分量串行接口(SDI)的初始转换,然后是从SDI到MIPI CSI的后续转换。这需要在工作流程中额外引入一个FPGA,以促进完成该转换过程。完成这些转换后,可将FPGA作为关键的软件到硬件接口,用于仿真作为ECU输入的传感器信号,以将数据馈送至FPD-Link III (PXIe-1486)和GMSL2 (PXIe-1487)的汽车视频接口。

图5: 基于HDMI的相机传感器仿真
在带宽方面,系统以每秒4.5 GB的速度将视频数据注入ECU。该设置的一个显著优势在于其独立于仿真内容。虽然本例中使用的是基于Linux的仿真引擎,但同一数据路径还可支持来自其他仿真提供商的数据。HDMI->SDI转换所需的额外FPGA确实增加了成本,但也增强了系统在新数据路径中进一步处理图像数据的能力。
但该配置存在一定局限性。首先,HDMI接口带来了挑战:需要相当复杂的转换工具链才能将输入从HDMI转换为SDI,随后再转换为CSI。归根结底,它具有与前述设置类似的限制,即相机数据和超声波之间缺少同步和多余的车辆总线仿真。最重要的是,该HIL系统无法有效地用作开环回放HIL,因此无法使用GPU回放预先捕捉到的数据。
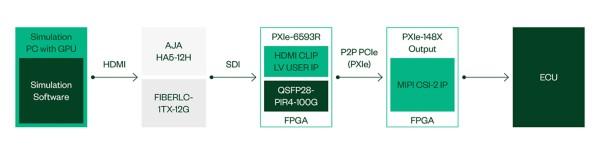
图6: 视频注入流水线架构
基于RDMA的HIL
RDMA HIL系统是NI的最新一代产品,使用了基于融合以太网的远程直接内存访问(RoCE)。该系统基于RDMA(用于在主机PC和NI PXI之间进行无缝数据交换的接口)构建。RDMA可建立基于以太网的连接,实现低延迟、高带宽的视频数据传输,并通过在计算机内存和PXI实时控制器内存之间建立直接链接,而无需内存副本。从高级架构的角度来看,数据流从仿真PC开始,通过RDMA传输到位于PXI机箱内的PXI实时控制器,该机箱还装有用于为ECU供电的必要FPGA。该系统可以以开环和闭环配置运行,支持回放预先捕捉到的数据并将反馈集成回实时控制器。
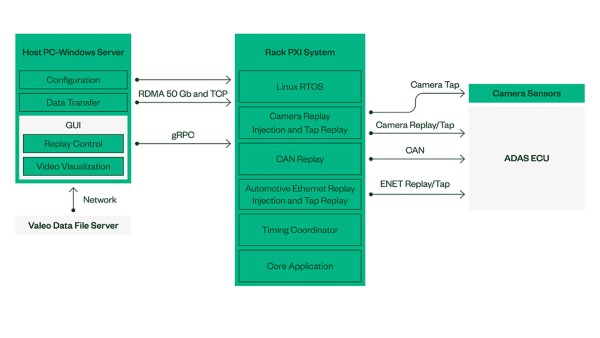
图7: RDMA开环回放HIL
该架构提供了目前所能观察到的最高吞吐量性能,即单个RDMA模块的数据传输速率高达6.25 GB/s。另一显著优势是其开环和闭环HIL设置的架构统一,主要区别在于数据源的选择,但无论数据源来自存储文件还是仿真均可复用。然而,其主要优势还是在于引入了精确的同步机制,可以将视频数据与车辆总线信号顺畅对应。这种同步不仅限于相机,还涵盖了各种传感器,从而提供全面的同步数据集。例如,法雷奥正在积极评估这些HIL系统的整合,并在其未来战略中,可能会用于取代现有的MXI HIL。
但是,使用RDMA时需要考虑一些因素。仿真引擎必须与RDMA兼容,这要求从仿真引擎调用RDMA客户端库DLL。如果无法将外部DLL与仿真引擎集成,则另一种方法是使用HDMI到RDMA转换器。该方法本质上是创建一个结合了先前配置元素的混合设置,但需注意,额外的转换步骤(HDMI到RDMA)会引入附加延迟和抖动。
全面的解决方案: NI AD软件开发套件(SDK)
NI基于RDMA的HIL系统独立于仿真器设计,可满足客户所有需求。客户使用NI AD软件开发套件(SDK)可实现多种功能。 SDK有助于快速集成传感器总线仿真与仿真软件。随附的AD SDK插件组可提供一致的接口,从而简化仿真器提供商和AD HIL系统之间的集成。利用LabVIEW和gRPC支持,该SDK配备了仿真API,为无缝集成提供定义明确的接口。该方法支持第三方仿真器公司使用熟悉的工具创建简单测试点,从而支持调试和CI/CD流程。与此同时,该软件套件还可降低仿真软件和ADAS HIL系统之间系统通信的复杂程度,使最终用户灵活选择仿真器供应商。
NI与法雷奥协同合作
NI与法雷奥之间的合作伙伴关系包括研发合作、NI原型的早期使用、工程服务以及一站式HIL系统开发。这一协同合作使法雷奥始终处于ADAS验证领域的前沿。
法雷奥团队借助NI PXI平台,在全球范围内实现标准化验证系统,并利用该平台提供的模块化、精确时间同步以及对基本汽车接口的支持,从而实现测试组件复用。
结论
在法雷奥与NI携手合作期间,其HIL系统的发展过程展示了在应对日益复杂的ADAS/AD系统所带来的挑战时,调整测试方法的重要性。基于RDMA的HIL系统提供了高吞吐量和同步能力,在HIL系统的发展历程中迈出了重要一步。法雷奥始终致力于利用NI系统来满足日新月异的ADAS/AD验证需求,确保客户在瞬息万变的汽车行业中称心如意。
注册商标Linux®的使用获得了Linus Torvalds专属授权商LMI的再授权,Linus Torvalds拥有Linux®注册商标在全球范围内的所有权。
本案例分析涉及的产品
NI合作伙伴是独立于NI的商业实体,与NI之间不存在代理或合资关系,亦不属于NI相关业务的一部分。