Biblioteca de ImagingLab Robotics para la Guía de Referencia de DENSO
Información general
Contenido
Introducción
Esta guía de referencia introduce los conceptos básicos de la Biblioteca de ImagingLab Robotics para DENSO con ejemplos que sirven como un punto de inicio para programar su propio sistema de robótica DENSO y guiado por visión. Aprenda cómo usar la Biblioteca de ImagingLab Robotics para DENSO y explore movimientos de un solo punto, movimientos combinados y aplicaciones guiadas por visión. El robot DENSO debe funcionar con el teach pendant para sacar el mejor provecho del código ejemplo. Note que esta guía de referencia es un ejemplo configurable - no una aplicación lista para usar - y no introduce cada aspecto de la Biblioteca de ImagingLab Robotics o los robots DENSO. Si está desarrollando un sistema complicado de robótica, considere consultar un Partner de NI.
Configure su Sistema
Robslave
Para cambiar el robot a un estado de esclavo que usted puede controlar con el software NI LabVIEW, debe cargar e iniciar un programa DENSO llamado robslave.pac, el cual se vende con el software DENSO b-CAP en el controlador del robot. Use el software DENSO para descargar robslave.pac al controlador. Después de conectar el controlador, use el Denso-Robslave VI para iniciar el programa y para detener el programa al salir de la aplicación de LabVIEW.
Permitir Control con Ethernet
Todos los comandos del robot de LabVIEW son enviados por una conexión de Ethernet al controlador del robot. El controlador del robot permite control desde una dirección IP solamente, la cual se debe añadir al controlador como un cliente válido. Para hacer esto en el teach pendant, navegue a Settings»Communications Setting»Client. Con este menú, puede cambiar la dirección IP para igualar la dirección IP a la PC o el dispositivo en tiempo real que usted está conectando al robot. También debe configurar el robot para recibir comandos por Ethernet. Navegue al Settings»Communications Setting»Ext Run en el teach pendant y seleccione Ethernet como el puerto de comunicación por el cual se van a ejecutar los programas. El puerto Ethernet también debe tener permisos Leer/Escribir, las cuales son configuradas en Settings»Communications Setting»Permit.
Cableado
Para controlar el robot DENSO con LabVIEW, debe cambiar el botón del teach pendant a Auto y activar las líneas Enable Auto en el puerto de Safety I/O. Además, debe conectar la entrada Stop all Steps de la conexión de min-I/O en el controlador DENSO o la línea step-stop a una fuente de alimentación de 24 V. Ésta puede ser una fuente de alimentación externa de 24 V o puede cambiar los interruptores en el controlador para tener los 24 V alimentados internamente. Consulte el manual DENSO para más información.
Iniciación
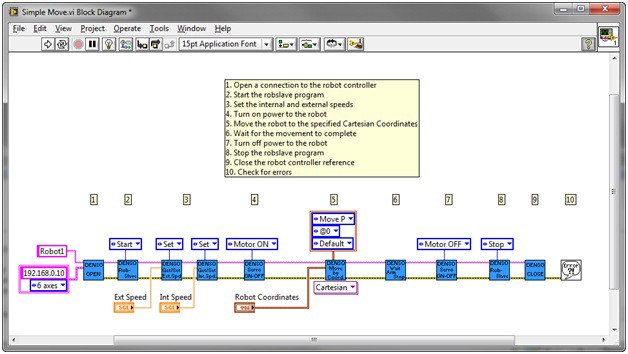
Conectar al Controlador del Robot
El primer paso para programar una aplicación de robótica DENSO es la iniciación del robot y sus parámetros. Abra una conexión al controlador del robot al usar el Denso-Open VI y especificar la dirección IP del controlador y cuántos ejes tiene el robot. Para encontrar la dirección IP del controlador del robot, navegue al Settings»Communications Settings»Address en el teach pendant de DENSO. Note que debe añadir la dirección IP de la PC o el objetivo en tiempo real que conecta al controlador del robot como un cliente válido en el menú Communications Setting como se menciona anteriormente. Las opciones del Denso-Open VI para el número de ejes son 6, 5, 4 e Indefinido. No necesita diferenciar entre modelos distintos de cada robot que tienen el mismo número de ejes. Por ejemplo, puede ejecutar algunos programas escritos para un robot de seis ejes de la serie VS usando un robot de seis ejes de la serie VP sin cambiar ningún código LabVIEW.
Establecer Velocidades
Puede establecer dos tipos de velocidad de robot diferentes en LabVIEW: externa e interna. La velocidad externa es usada más a menudo para controlar las variaciones entre los movimientos una vez desplegados. Por ejemplo, el robot se necesita mover a una velocidad más lenta al ensamblar una pieza, pero se puede mover a una velocidad más rápida al regresar para recoger otra pieza. Después que el robot ha colocado la pieza o antes de recoger una pieza, simplemente llame un external speed VI para establecer la velocidad deseada. La velocidad interna es comúnmente usada para fines de pruebas. Si una prueba necesita ser completada al 25% de la velocidad, puede establecer la velocidad interna a 25 y todas las velocidades en los movimientos del robot son escaladas a un 25% de su valor. De lo contrario, necesita ir al código y establecer cada velocidad a un 25% de su valor original. Esto puede ser tedioso porque algunas aplicaciones requieren una gran variedad de velocidades para varios movimientos. Por seguridad, establezca las velocidades internas y externas después de iniciar el robslave.pac para asegurar los movimientos del robot a la velocidad correcta cada vez que ejecuta el programa.
Encendido/Apagado
Después de abrir una conexión al controlador del robot, la energía no es alimentada al robot hasta que llama el Denso – Servo – Set ON-OFF VI. Llame este VI con la entrada de estado del motor establecida en Motor On antes de enviar cualquier comando de movimiento y cambiar la entrada de estado del motor a Motor Off cuando todo el movimiento es completado.
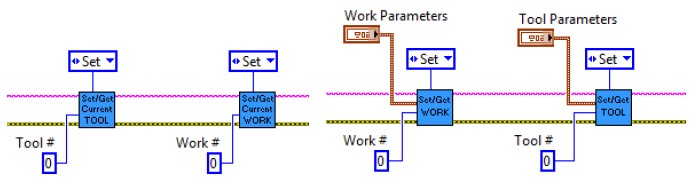
Herramientas
Con robots DENSO, el usuario puede establecer la herramienta o actuador, el cual esta sujetado al final del robot. Con esta función, cambiar el actuador no implica un cambio completo de las posiciones programadas. En cambio, esta función contrarresta automáticamente los movimientos para alcanzar la misma posición de acuerdo a los parámetros del actuador utilizado. El sistema de coordenadas o área de trabajo, define las posiciones absolutas al comandar el robot usando coordenadas Cartesianas. La Biblioteca de ImagingLab Robotics para DENSO permite al usuario establecer y editar la herramienta y área de trabajo, así como añadir nuevas herramientas y áreas de trabajo usando los VIs que se muestran en las imágenes a continuación. Estas imágenes muestran cómo establecer la herramienta/área actual y los nuevos valores para una herramienta/área específica, pero usted puede cambiar la entrada desde Set to Get para regresar los valores y configuraciones actuales.
Siguiente Paso
Continúe con el siguiente documento para aprender cómo puede programar un movimiento de un solo punto usando la Biblioteca de ImagingLab Robotics para DENSO.