用于DENSO的ImagingLab机器人库参考指南
概述
内容
简介
本参考指南介绍了用于DENSO的ImagingLab机器人库的基本概念,并提供了范例,可据此开始自行编程DENSO机器人和视觉引导系统。了解用于DENSO的ImagingLab机器人库的使用方法,以及单点移动、混合移动和视觉引导应用程序。请遵循示教器操作DENSO机器人,以充分利用本指南末尾的范例代码。注意,本参考指南为可配置范例,并非一站式应用程序,也不应将其视作ImagingLab机器人库或DENSO机器人的详尽介绍。如需开发复杂的机器人系统,可咨询NI合作伙伴。
配置系统
Robslave
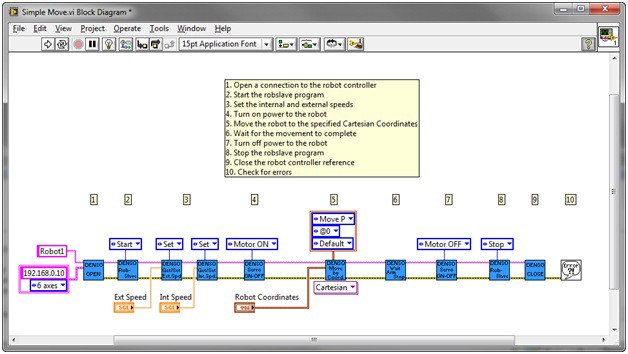
如需将机器人切换为可通过NI LabVIEW软件控制的从属状态,必须加载并启动名为robslave.pac的DENSO程序,该程序包含在机器人控制器上的DENSO b-CAP软件中。使用DENSO软件下载robslave.pac至控制器。连接至控制器后,使用Denso-Robslave VI启动程序,并在退出LabVIEW应用程序时停止程序。
支持以太网控制
LabVIEW的所有机器人命令均通过以太网连接发送至机器人控制器。仅可通过一个IP地址控制机器人控制器,因此必须将IP地址作为有效的客户端添加至控制器。选择设置»通信设置»客户端,可在示教器上进行操作。通过该菜单,您可以更改IP地址,使其与连接到机器人的计算机或实时设备的IP地址保持一致。还必须将机器人设置为通过以太网接收命令。在示教器上选择设置»通信设置»外部运行,选择以太网作为运行程序的通信端口。以太网端口还必须具有读取/写入权限,可在设置»通信设置»权限中进行设置。
连线
如需使用LabVIEW控制DENSO机器人,必须将示教器的键转至自动,并打开安全I/O端口上的启用自动线。此外,必须将DENSO控制器min-I/O连接的停止所有步骤输入端或步进停止线连接至24 V电源。可以是外部24 V电源,或者将控制器内的跳线更改为内部24 V电源。详细信息见DENSO手册。
初始化
连接至机器人控制器
编程DENSO机器人应用程序的第一步是初始化机器人及其参数。使用Denso-Open VI打开与机器人控制器的连接,并指定控制器的IP地址和机器人的轴数。如需查找机器人控制器的IP地址,请在DENSO示教器上导览至设置»通信设置»地址。注意,必须将连接至机器人控制器的计算机或实时终端的IP地址添加为上述机器人通信设置菜单中的有效客户端。Denso-Open VI的轴数选项为6、5、4和未定义。无需区分具有相同轴数的机器人的不同型号。例如,可使用VP系列六轴机器人运行为VS系列六轴机器人编写的程序,无需更改任何LabVIEW代码。
设置速度
可在LabVIEW中设置两种不同的机器人速度类型:外部和内部。外部速度通常用于控制部署后移动间的变化。例如,组装零件时,机器人可能需要以较慢的速度移动,但返回拾取另一个零件时,机器人可以较快的速度移动。机器人放置零件后或拾取零件前,只需调用外部速度VI即可设置当前所需速度。内部速度通常用于测试。如需以25%的速度完成测试,可将内部速度设置为25,机器人移动过程中的所有速度将缩减至其值的25%。否则,需输入代码并将每个速度设置为原始值的25%。由于某些应用程序需要多种速度来实现不同移动,因此这可能会很繁琐。为了安全起见,请在启动robslave.pac后设置内部和外部速度,以确保每次运行程序时机器人以正确的速度移动。
上电/断电
打开与机器人控制器的连接后,只有调用Denso – Servo – Set ON-OFF VI后,机器人的电源才会打开。发送任何移动命令前,调用该VI,将电机状态输入设置为电机开,并在所有移动完成后将电机状态输入更改为电机关。
工件和工具
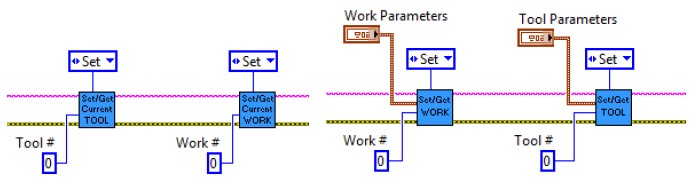
通过DENSO机器人,用户可设置当前工具或末端执行器,将其连接至机器人末端。使用该功能,更改末端执行器无需完全更改已编程的位置。相反,该功能根据所用末端执行器的参数自动偏移运动,以达到相同的目标位置。使用直角坐标系和横坐标命令机器人时,坐标系或工作区定义了绝对位置。用于DENSO的ImagingLab机器人库支持用户设置和编辑当前工具和工作区,以及使用下列截图中显示的VI添加新工具和工作区。这些截图显示了如何设置当前工具/工件和特定工具/工件的新值,但可将输入从设置改为获取,以返回当前值和设置。
后续步骤
继续阅读下列文档,了解如何通过用于DENSO的ImaginaLab机器人库为单点移动编程。
