ImagingLab Robotics Library for DENSO – Leitfaden
Überblick
Inhalt
Einführung
In diesem Leitfaden werden die grundlegenden Konzepte der ImagingLab Robotics Library for DENSO mit Beispielen vorgestellt, die als Ausgangspunkt für die Programmierung eigener DENSO-Robotik und bildverarbeitungsgestützter Systeme dienen. Hier lernen Sie die Verwendung der ImagingLab Robotics Library for DENSO kennen und erfahren mehr über Einzelpunktverschiebungen, überlagerte Verschiebungen und bildverarbeitungsgestützte Anwendungen. Der DENSO-Roboter sollte mit dem Programmierhandgerät eingesetzt werden, um den Beispielcode, der am Ende dieses Leitfadens beigefügt ist, optimal nutzen zu können. Beachten Sie, dass dieser Leitfaden keine einsatzbereite Anwendung, sondern ein konfigurierbares Beispiel beschreibt und nicht alle Aspekte der ImagingLab Robotics Library oder DENSO-Roboter vorstellt. Wenn Sie ein komplexes Robotiksystem entwickeln, sollten Sie sich an einen NI-Partner wenden.
Konfigurieren Ihres Systems
Robslave
Um den Roboter in einen Slave-Zustand zu versetzen, den Sie mit NI LabVIEW steuern können, müssen Sie das mit der Software DENSO b-CAP auf der Robotersteuerung gelieferte DENSO-Programm robslave.pac laden und starten. Laden Sie robslave.pac mit Hilfe der DENSO-Software auf die Steuerung herunter. Verwenden Sie nach dem Herstellen einer Verbindung mit der Steuerung das VI „Denso-Robslave“, um das Programm zu starten und beim Beenden der LabVIEW-Anwendung zu stoppen.
Zulassen der Ethernet-Steuerung
Alle Roboterbefehle von LabVIEW werden über eine Ethernet-Verbindung an die Robotersteuerung gesendet. Die Robotersteuerung ermöglicht die Steuerung über eine einzelne IP-Adresse, die Sie der Steuerung als gültigen Client hinzufügen müssen. Navigieren Sie dazu auf dem Programmierhandgerät zu Settings»Communication Settings»Client. In diesem Menü können Sie die IP-Adresse an die IP-Adresse des PCs oder des Echtzeitgeräts anpassen, den bzw. das Sie mit dem Roboter verbinden. Außerdem müssen Sie den Roboter so einstellen, dass er Befehle über Ethernet empfängt. Navigieren Sie auf dem Programmierhandgerät zu Settings»Communication Settings»Ext Run und wählen Sie „Ethernet“ als Kommunikations-Port aus, über den Programme ausgeführt werden sollen. Der Ethernet-Port muss zudem Lese-/Schreibberechtigungen haben, die unter Settings»Communication Settings»Permit festgelegt werden.
Verbindungen
Zur Steuerung des DENSO-Roboters mit LabVIEW müssen Sie den Schlüssel des Programmierhandgeräts auf Auto drehen und die Leitungen „Enable Auto“ am Sicherheits-I/O-Port aktivieren. Darüber hinaus müssen Sie den Eingang „Stop all Steps“ der Min-I/O-Verbindung auf der DENSO-Steuerung oder die Leitung zum Stoppen des Schritts mit einer 24-V-Versorgung verbinden. Hierbei kann es sich um eine externe 24-V-Stromversorgung handeln, oder Sie können die Jumper innerhalb der Steuerung ändern, um die 24-V-Versorgung intern bereitzustellen. Weitere Informationen finden Sie im DENSO-Handbuch.
Initialisierung
Herstellen einer Verbindung mit der Robotersteuerung
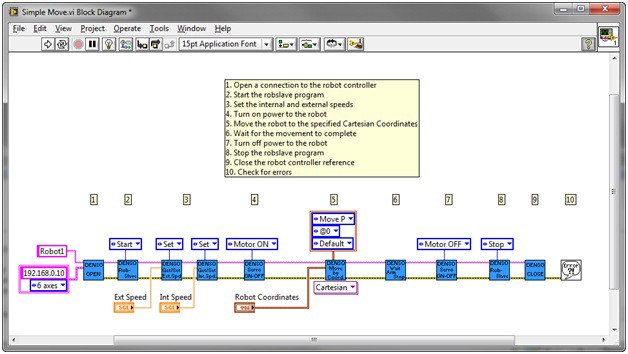
Der erste Schritt bei der Programmierung einer DENSO-Robotikanwendung ist die Initialisierung des Roboters und seiner Parameter. Stellen Sie mit Hilfe des VIs „Denso-Open“ eine Verbindung zur Robotersteuerung her und geben Sie die IP-Adresse der Steuerung und die Anzahl der Achsen des Roboters an. Um die IP-Adresse der Robotersteuerung zu ermitteln, navigieren Sie auf dem DENSO-Programmierhandgerät zu Settings»Communication Settings»Address. Beachten Sie, dass Sie, wie oben erwähnt, die IP-Adresse des PCs oder Echtzeit-Zielsystems, das mit der Robotersteuerung verbunden ist, im Menü mit den Kommunikationseinstellungen des Roboters als gültigen Client hinzufügen müssen. Die Optionen des VIs „Denso-Open“ für die Anzahl der Achsen lauten „6“, „5“, „4“ und „Undefiniert“. Sie müssen nicht zwischen verschiedenen Modellen der einzelnen Roboter unterscheiden, die dieselbe Anzahl von Achsen aufweisen. So können Sie beispielsweise einige Programme, die für einen sechsachsigen Roboter der VS-Serie entwickelt wurden, mit einem sechsachsigen Roboter der VP-Serie ausführen, ohne LabVIEW-Code zu ändern.
Festlegen von Geschwindigkeiten
In LabVIEW können zwei verschiedene Robotergeschwindigkeitstypen festgelegt werden: extern und intern. Externe Geschwindigkeit wird am häufigsten verwendet, um die Variationen zwischen Bewegungen nach der Bereitstellung zu regeln. So muss sich der Roboter z. B. beim Zusammenbau eines Teils langsamer bewegen, kann sich jedoch beim Zurückkehren zum Aufnehmen eines weiteren Teils schneller bewegen. Nachdem der Roboter das Teil platziert hat oder bevor er es aufnimmt, rufen Sie einfach das VI für externe Geschwindigkeit auf, um die aktuell gewünschte Geschwindigkeit einzustellen. Interne Geschwindigkeit wird in der Regel zu Testzwecken verwendet. Wenn ein Test mit einer Geschwindigkeit von 25 Prozent abgeschlossen werden soll, können Sie die interne Geschwindigkeit auf 25 festlegen, sodass alle Geschwindigkeiten der Roboterbewegungen auf 25 Prozent zurückgesetzt werden. Anderenfalls müssen Sie in den Programmcode wechseln und jede Geschwindigkeit auf 25 Prozent ihres ursprünglichen Werts festlegen. Dies kann mühsam sein, da einige Anwendungen für verschiedene Bewegungen eine Vielzahl von Geschwindigkeiten erfordern. Legen Sie nach dem Start von robslave.pac die interne und externe Geschwindigkeit fest, um sicherzustellen, dass sich der Roboter bei jeder Ausführung des Programms mit der richtigen Geschwindigkeit bewegt.
Einschalten/Ausschalten
Nach dem Herstellen einer Verbindung mit der Robotersteuerung wird der Roboter erst eingeschaltet, wenn Sie das VI „Denso – Servo – ON-OFF“ aufrufen. Rufen Sie dieses VI auf, wobei der Motorstatus-Eingang vor dem Senden von Bewegungsbefehlen auf Motor EIN festgelegt ist, und ändern Sie den Motorstatus-Eingang nach Abschluss aller Bewegungen in Motor AUS.
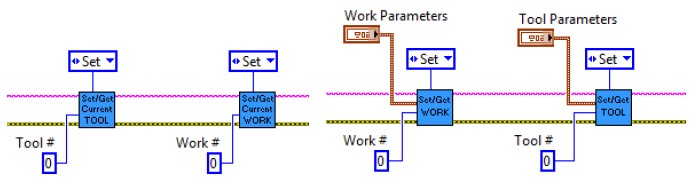
Arbeitsbereich und Werkzeug
Bei DENSO-Robotern kann der Benutzer das aktuelle Werkzeug (Endeffektor) festlegen, das am Ende des Roboters angebracht ist. Mit dieser Funktion erfordert das Ändern des Endeffektors keine vollständige Änderung der programmierten Positionen. Stattdessen versetzt diese Funktion die Bewegungen automatisch, um basierend auf den Parametern des verwendeten Endeffektors dieselbe Zielposition zu erreichen. Das Koordinatensystem (Arbeitsbereich) definiert die absoluten Positionen, wenn der Roboter mit Hilfe der kartesischen und Trans-Koordinaten gesteuert wird. Die ImagingLab Robotics Library for DENSO ermöglicht dem Benutzer das Festlegen und Bearbeiten des aktuellen Werkzeugs und Arbeitsbereichs sowie das Hinzufügen neuer Werkzeuge und Arbeitsbereiche mit Hilfe der in den folgenden Screenshots dargestellten VIs. Diese Screenshots veranschaulichen, wie das aktuelle Werkzeug/der aktuelle Arbeitsbereich und neue Werte für ein bestimmtes Werkzeug/einen bestimmten Arbeitsbereich festgelegt werden. Sie können jedoch den Eingang von „Set“ in „Get“ ändern, um die aktuellen Werte und Einstellungen auszugeben.
Nächster Schritt
Im folgenden Dokument erfahren Sie, wie Sie eine Einzelpunktbewegung mit Hilfe der ImagingLab Robotics Library for DENSO programmieren können.
