Elegir el hardware adecuado para sus aplicaciones de visión
Información general
National Instruments ofrece una variedad de opciones de hardware que soportan adquisición y procesamiento de imágenes. En este documento, explore cómo elegir entre estos diferentes formatos aprendiendo sobre el soporte de software y el soporte de cámara para cada una de estas plataformas de hardware. Vea también cómo estas opciones de hardware se clasifican en función de diferentes criterios de rendimiento, industrialidad e integración.
Contenido
- Opciones de plataforma de hardware de NI para aplicaciones de visión
- Soporte de software y SO
- Comparación de beneficios y características para cada plataforma
- Soporte de cámara y elección de cámara
Opciones de plataforma de hardware de NI para aplicaciones de visión
Las ofertas de hardware de visión de NI incluyen una variedad de potentes soluciones basadas en PC y PXI. Estas plataformas de hardware difieren de varias maneras, incluyendo el tamaño y el rendimiento, y cada una es adecuada para diferentes entornos, aplicaciones y arquitecturas de sistemas.
Los controladores NI CompactRIO y NI Single-Board RIO de más alto rendimiento también soportan adquisición y procesamiento de imágenes en anchos de banda más bajos. Esto se logra a través de una resolución de imagen más pequeña, una velocidad más baja y una mayor compresión de imágenes a las que se ofrecen en otras plataformas de visión.
Figura 1: CompactRIO y NI Single-Board RIO como una plataforma de visión

Soporte de software y SO
Los paquetes de software de visión de NI están diseñados para ejecutarse con las opciones de hardware presentadas en la Figura 1. Esto significa que puede cambiar entre plataformas e incluso reutilizar grandes porciones de código existente en cualquiera de los dispositivos de hardware de visión. También puede reducir el tiempo de desarrollo y los costos de mantenimiento asociados con múltiples sistemas manteniendo un solo paquete de software.
Las plataformas CompactRIO y NI Single-Board RIO soportan únicamente las bibliotecas de procesamiento de imágenes del Vision Development Module y no del NI Vision Builder for Automated Inspection.
PXI y | PCs industriales y de escritorio | CompactRIO/ | |
• | • | X | |
• | • | • |
Tabla 1: Soporte de software de visión para opciones del sistema de hardware
Además de usar el entorno de programación gráfica NI LabVIEW en todas las plataformas, usted puede aprovechar el Vision Development Module para programar sistemas que ejecutan un SO Windows (ver Tabla 2) desde un entorno de desarrollo basado en texto usando C, C++, Visual Lenguajes Basic y .NET (Visual Basic .NET y C#).
PXI y | PCs industriales y de escritorio | CompactRIO/ | |
Windows | • | • | X |
Real-Time | • | • | • |
Tabla 2: Soporte del sistema operativo para opciones del sistema de hardware
Comparación de beneficios y características para cada plataforma
Las diferentes plataformas se comparan en base a los siguientes nueve criterios:
- E/S integradas – la cantidad de E/S, así como la amplitud (TTL digital, opto-aislado digital, analógico)
- Menos piezas móviles para mantener – los diseños sin ventilador y las unidades de estado sólido son menos susceptibles a daños por vibración
- Tamaño compacto – el tamaño y el ajuste más pequeños se pueden diseñar físicamente en sistemas más grandes
- Consumo de energía – potencia total consumida por el sistema
- Clasificación de temperatura – rango del sistema de temperatura para el que se ha validado el sistema
- Ancho de banda de adquisición – rendimiento máximo al que se pueden adquirir imágenes en el sistema según lo definido por la combinación de resolución de imagen, profundidad de bits y velocidad de marco
- Tamaño máximo de imagen – tamaño máximo de imagen que se puede adquirir en el sistema con limitaciones de memoria y procesamiento
- Potencia de procesamiento – una mayor potencia de procesamiento se caracteriza por la velocidad y la cantidad de núcleos o co-procesadores
- Integración con otras medidas (por ejemplo, DAQ, movimiento) – conexión y disparo RTSI directos y disponibilidad de otros módulos que se pueden colocar en el sistema (módulos de la serie C, módulos PXI, tarjetas PCI) en comparación con la integración a través de conexiones Ethernet a otros dispositivos
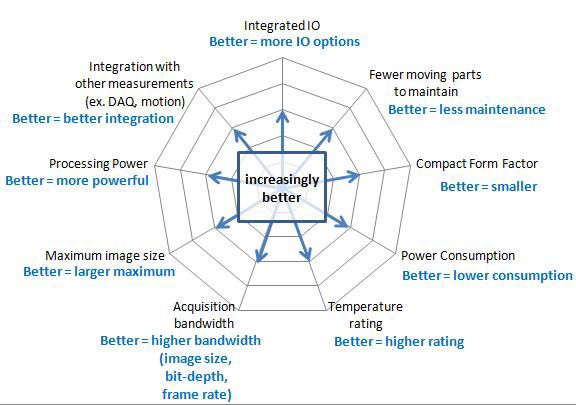
Figura 2: Diagrama de radar de referencia
La distribución de clasificaciones para cada plataforma de hardware depende de los criterios del diagrama de radar. Curiosamente, el área cubierta es aproximadamente la misma en cada diagrama, lo que también se puede ver en las puntuaciones totales similares en la Tabla 3.
PXI y | PCs industriales y de escritorio | CompactRIO/ | ||
Idoneidad industrial | E/S integradas | 5 | 5 | 5 |
Menos partes móviles | 3 | 3 | 5 | |
Tamaño compacto | 2 | 2 | 4 | |
Consumo de potencia | 2 | 2 | 5 | |
Rango de | 4 | 3 | 5 | |
Rendimiento | Ancho de banda | 4 | 5 | 1 |
Tamaño máximo de imagen | 4 | 5 | 1 | |
Potencia de procesamiento | 4.5 | 5 | 2 | |
Integración con | 5 | 4 | 4 | |
TOTAL | 33.5 | 34 | 32 | |
Tabla 3: Comparación de clasificaciones para todas las plataformas de hardware de NI Vision
Sistemas PXI y PXI Express
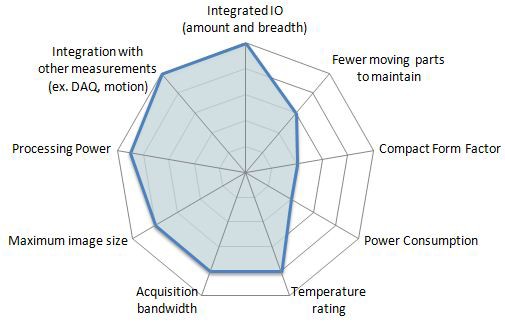
Figura 3: Diagrama de radar para sistemas PXI y PXI Express
Características
- Soporte para todos los estándares de imágenes
- Temporización, disparo e integración insuperables con un disparo en estrella, que es una señal de disparo de alto rendimiento que se puede utilizar para sincronizar todos los módulos en un chasis PXI
- Gran disponibilidad de tarjetas insertables relacionadas con visión y sin visión
PCs industriales y de escritorio
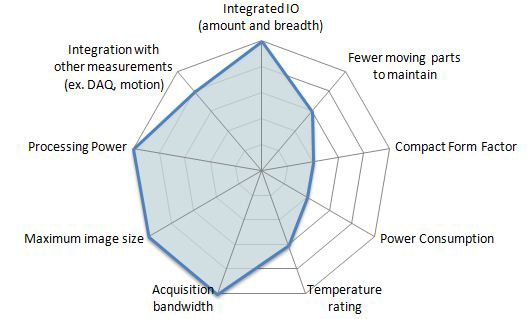
Figura 4: Diagrama de radar para sistemas de PC
Características
- Gran disponibilidad de tarjetas insertables relacionadas con visión y sin visión
- Tiempo dedicado a calificar PCs para compatibilidad con tarjetas insertables
- Disponibilidad de vida útil más corta que los sistemas validados de NI (sistema embebido de visión, PXI)
- No se necesitan tarjetas insertables si se utilizan puertos integrados USB 2.0, USB3, IEEE 1394, [Gigabit] Ethernet
(aunque las tarjetas insertables ofrecen E/S y descarga) - Opciones ilimitadas para procesadores, memoria, almacenamiento, etc.
CompactRIO y NI Single-Board RIO
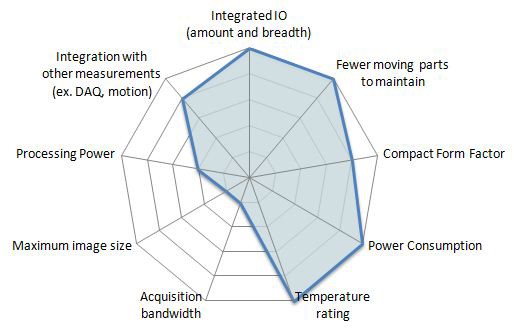
Figura 5: Diagrama de radar para sistemas CompactRIO y NI Single-Board RIO
Características
- E/S modulares (combinar según la aplicación)
- Temperatura nominal de -40 a +70 °C
- NI Single-Board RIO es una versión sin cubierta adecuada para dispositivos OEM/embebidos
- Menor ancho de banda de adquisición y alta carga de descompresión de imagen en el procesador
(actualmente adecuado para adquirir formatos jpeg usando cámaras IP)
Soporte de cámara y elección de cámara
Cuando se trata de elegir un sistema de visión, la compatibilidad de la cámara a menudo puede ser el factor decisivo final. Las posibilidades varían mucho según el estándar de imágenes que elija y el tipo de sensor de imágenes necesario para la aplicación determinada. Con la amplia selección de cámaras en el mercado y la gran cantidad de estándares soportados por National Instruments, es posible que necesite ayuda para seleccionar su sistema de visión. Las tablas 3 y 4 brindan información sobre qué soluciones de hardware deben considerarse junto con los diferentes tipos de cámaras.
Figura 6: Los sistemas de visión de National Instruments son compatibles con cámaras de muchos proveedores.

PXI y | PCs industriales y de escritorio | CompactRIO/ | |
Paralelo digital | • | • | — |
Camera Link | • | • | — |
GigE Vision | • | • | — |
IEEE 1394 | • | • | — |
USB 2.0 (DirectShow) | • | • | — |
IP | • | • | • |
Sensor de imagen integrado | — | — | — |
1Bajo ancho de banda solo a través de un módulo analógico que no es de NI
Tabla 4. Soporte del sistema para estándares de imágenes
PXI y | PCs industriales y de escritorio | CompactRIO/ | |
Escaneo de área (2D) | • | • | • |
Idoneidad para escaneo de línea | • | • | —1 |
Imágenes en color | • | • | • |
Infrarrojos | • | • | —1 |
Sensores de perfilado láser 3D2 | • | • | — |
Imágenes UV | • | • | — |
Imágenes de rayos X | • | • | —1 |
1Hay opciones limitadas disponibles que hacen posibles estas combinaciones de sensor-sistema si la plataforma de hardware es un requisito.
2Las medidas 3D también se pueden implementar utilizando múltiples cámaras y/o fuentes de luz estructurada junto con algoritmos de triangulación.
Tabla 5. Idoneidad de los sistemas para diferentes tipos de sensores