ブリッジベースセンサでトルクを測定する
このドキュメントでは、トルク計測の基本と、センサ仕様の違いによるトルクセンサの性能への影響について説明します。センサを決定したら、トルク測定の適切な調節、収集、視覚化に必要なソフトウェアとハードウェアを検討することができます。また、必要に応じて追加の信号調節を検討することもできます。
トルクとは?
力とは、物体間の相互作用を測る基準です。あらゆる作用には、同等の逆反応があります。力は物体に対するプッシュまたはプルともいいます。振幅と方向の両方を表すベクトル量です。
トルクとは、軸を中心に物体を回転させる力の性質を指します。力をプッシュ/プルと表現するのと同様、トルクは物体のツイストと表現できます。トルクを表すSI認定単位はニュートンメートル (Nm) です。シンプルに定義すると、トルクは力に距離を乗算したものと同等です。ここで時計回りのトルクは通常正で、反時計回りのトルクは通常負となります。トルクセンサは、トーションバーに取り付けた歪みゲージからなります。バーが回転すると、ゲージはトルクに比例したバーの剪断応力に応答します。

トルクを測定する
トルクの測定には、反作用トルクセンサと回転トルクセンサの2つの一般的な方法があります。主な違いは、テスト対象デバイスと回転できるかどうかです。
反作用
反作用トルクとは、力がかけられたり吸収されたときに、装置の回転部分によって固定部分に課される回転力 (モーメント) のことです。負荷源が固定されているときに駆動源が回転しようとすると、トルクが検知されます。反作用トルクセンサは動きが制限されており、ハウジングやカバーがセンサ要素に固定されているため、360度回転することはできません。そうしたセンサは、一般に反復的にかくはんするような動きのトルク測定に使用されます。それらのセンサはベアリングやスリップリングといった回転要素を一切使用しないため、設置や使用のコスト効果が優れています。
回転
回転トルクセンサは、設計と用途が反作用トルクセンサに似ていますが、トルクセンサが被検体と直列に設置される点が異なります。トルクセンサの軸は360度回転するため、回転要素からの信号を固定面に伝達する手段が必要です。
これを実現するには、スリップリング、回転トランス、テレメトリの3つの一般的な取り付け方法のいずれかを使用します。
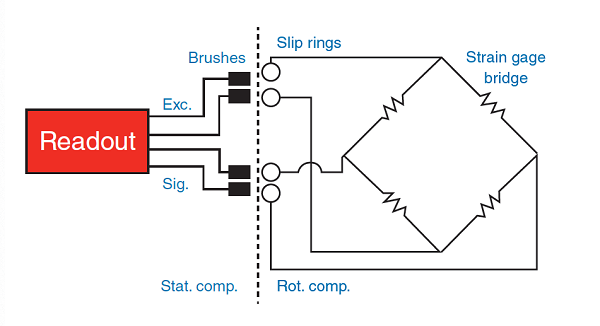
スリップ
スリップリング方式では、歪みゲージブリッジが回転軸に設置された4個のスリップリングに接続されています。シルバーグラファイトのブラシでスリップリングをこすることで、入ってくるブリッジ励起と送り出される信号の電気経路が作られます。ACとDCのいずれかを使用して、歪みゲージブリッジを励起します。
回転
トランス方式において、回転トランスが従来のトランスと異なるのは、1次巻線と2次巻線のどちらが回転しているかという点のみです。1つのトランスを使用してAC励起電圧を歪みゲージブリッジに伝送し、2つ目のトランスを使用して信号出力をトランスデューサの回転していない部分に送信します。そのため、2個のトランスが4個のスリップリングの代わりとなり、トランスデューサの回転要素と固定要素の間での直接的な接触は必要なくなります。
デジタル
デジタルテレメトリ方式では、接触点が一切ありません。システムは、レシーバ/トランスミッタモジュール、結合モジュール、信号処理モジュールから成り立っています。トランスミッタモジュールは、トルクセンサに統合されています。これはセンサ信号をラジオ周波数搬送波に増幅、デジタル化、変調するもので、その信号はキャリパ結合モジュール (レシーバ) によって受信されます。その後、デジタル計測データが信号処理モジュールによって復元されます。
適切なトルクセンサを選択する
トルクセンサの選択は、原則として容量のニーズと物理的/環境的要件が基準となります。
容量―適切な容量を選ぶには、予測される最大/最小トルクを特定する必要があります。外力トルクとモーメントによってさらに圧力が加わり、疲労が加速するため、センサの確度と性能に影響が出ます。軸、半径、曲げ以外のあらゆるトルクは外力とされ、事前に特定する必要があります。設置方法によってそのような負荷の影響を最小限にすることができない場合は、センサのマニュアルを参照して、外力負荷がセンサの定格内であるかどうかを確認します。
物理的/環境的要件―あらゆる物理的制約 (長さや直径など) や、トルクセンサのシステムへの設置方法などについて検討します。どのような環境でセンサを稼動させるかについて考えておくことで、さまざまな温度範囲や湿度、汚染物質 (油、泥、埃など) の影響を受ける環境でも適正な性能が保証できます。
回転/分 (rpm)―回転トルクセンサでは、トルクセンサが回転する時間長と速度を理解して、RPMを特定する必要があります。
トルクセンサの信号調節
トルクセンサには、調節済みと未調節があります。調節済みセンサは、計測用の通常回路のほかにフィルタ、信号アンプ、励起リード線に必要なコンポーネントを搭載しているため、DAQデバイスに直接接続することができます。未調節センサを使用している場合は、優れたブリッジベースのトルク計測システムを構築するために、いくつかの信号調節要素について検討する必要があります。次の項目の1つ以上が必要になる場合があります。
- ホイートストンブリッジ回路に電力を供給する励起―歪み測定リソースで詳細を見る
- リモートセンシング―リード線が長いために生じる励起電圧の誤差を補正する
- 増幅―計測分解能を高め、SN比を向上する
- フィルタ処理―外部の高周波数ノイズを除去する
- オフセットヌル―歪みがない場合、ブリッジのバランスを整えて、0 Vを生成する
- シャントキャリブレーション―ブリッジの出力が既知の予測値かどうかを確認する
これらの誤差の補正方法や、ブリッジベースのトルク計測に関するその他のハードウェアの注意事項については、「高確度のセンサ計測を実現するためのテクニカルガイド」をダウンロードしてください。
トルクセンサをNIハードウェアに接続する
センサまたはテストのニーズを把握したら、次の重要なステップとして、そのデータを収集するためのハードウェアを決定します。収集ハードウェアの品質によって、収集するデータの品質が決まります。
NIは、トルクデータ収集用に設計され、さまざまなトルクブリッジベースのセンサと互換性のある、幅広い力/ブリッジ計測ハードウェアを提供しています。
シンプルなハードウェアのセットアップ
トルクセンサに適した推奨ハードウェア
CompactDAQ歪み/負荷バンドルを使用すると、トルクセンサを各種の歪み/ブリッジ入力モジュールやCompactDAQシャーシに簡単に接続できます。

その他のトルク測定向け製品
以下の製品をトルクセンサとの接続に使用できます。これらの製品は、圧力、力、トルクの測定を集録することもできます。ブリッジベースまたはその他の圧力センサによる圧力測定、歪みゲージによる歪み測定、ブリッジベースロードセルによる負荷測定について検討し、NI製品で使用する適切なセンサをお選びください。



参考資料
- http://sensing.honeywell.com/white-paper-effectivelyusingpressureloadandtorquesensorswithtodaysdataacqusitionsystems-008883-2-en.pdf
- http://www.pcb.com/linked_documents/force-torque/catalog/sections/ftq200g_0107_6.pdf
- http://www.futek.com/load_cell_selection.aspx
- http://www.himmelstein.com/images/B705.pdf