ni.com is experiencing intermittent service disruptions.
Support teams are actively working on the resolution.
ni.com is experiencing intermittent service disruptions.
Support teams are actively working on the resolution.
All source measure units (SMUs) have a DC power boundary that shows the voltage and current limits of the instrument for both sinking and sourcing operations. Additionally, certain SMUs can operate beyond the basic DC power boundary by pulsing current or voltage instead of supplying a constant DC source. Even with output restrictions in the extended pulse boundary, these SMUs are extremely useful for high-power IV characterization and simplify the overall complexity.
Testing in pulsed mode offers two key benefits:
Sourcing high power is useful for IV characterization of devices such as high-brightness LEDs, power insulated gate bipolar transistors (IGBTs), and MOSFETs, while sinking high-power pulses is useful when the SMU acts as a load for devices such as power management ICs. SMUs with an extended pulsing boundary give you the ability to perform high-power tests without stacking multiple SMUs together to achieve higher power.
In general, power provided by the SMU is dissipated as heat in the device under test (DUT). This increases the temperature and changes the electrical and physical properties of the DUT. At a certain temperature, the properties of the DUT change so dramatically that you either get skewed IV data or cause damage to the DUT. Pulsing power instead of supplying a constant DC source reduces the average power dissipation through the DUT and minimizes the effects of self-heating. In practice, test engineers find pulse testing highly desirable because it leaves room for testing high-power devices without the need to put together elaborate thermal management systems.
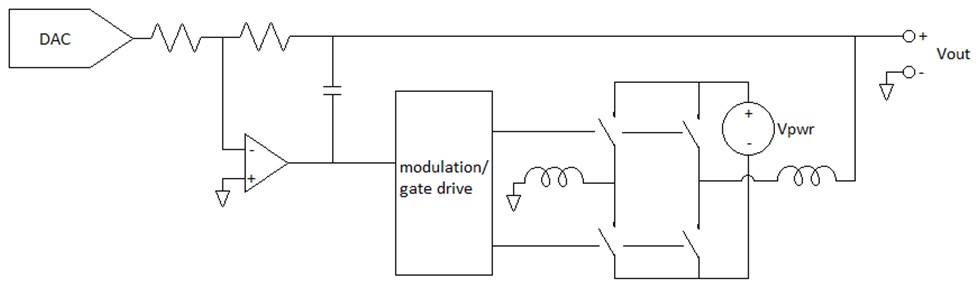
SMUs with extended pulsing range typically use a unique output architecture to temporarily achieve power above the rated DC boundary. For example, the NI PXIe-4139 precision system SMU can generate pulses up to 500 W compared to 20 W DC.
By supporting the internal power supply of the SMU (Vpwr) with sufficient internal capacitance, the maximum DC output of 20 W can be temporarily exceeded, giving the NI PXIe-4139 the ability to supply brief large pulses of power without limitations imposed by the output stage.
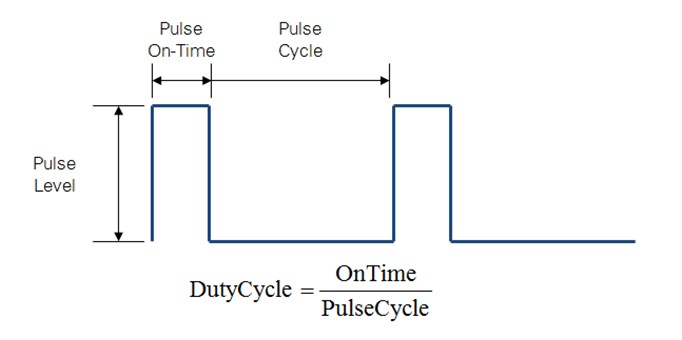
Because SMUs like the NI PXIe-4139 are temporarily outputting more power than they draw from their power supply, they are constrained in how fast and how long they can output that power. Typically there are restrictions on key pulsing specs to ensure the SMU can consistently output the desired power and does not overheat from sinking too much power. When operating the SMU in the extended pulse boundary, it is important to note pulse specifications such as duty cycle, maximum power, maximum pulse on-time, minimum pulse on-time, and minimum pulse cycle.
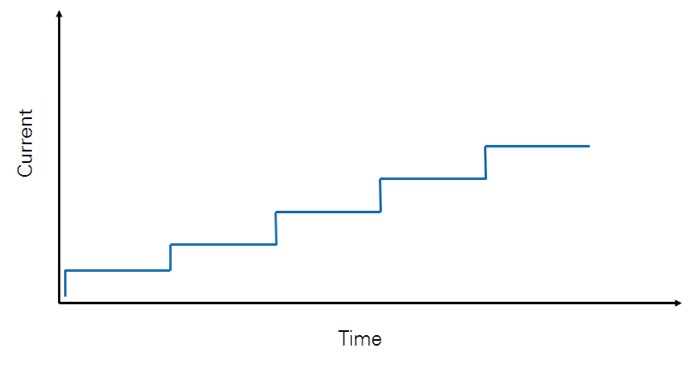
Most semiconductor test applications with SMUs involve some form of source and measure action. A basic DC sweep incrementally increases the output until the sequence is completed, as in the chart below, which shows a five-step sequence of current values.
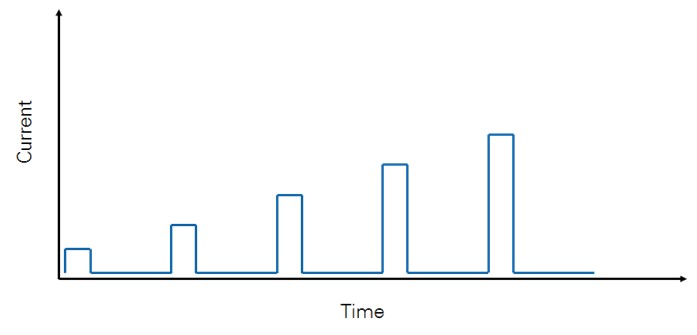
A pulsed sweep and a DC sweep are similar in that you likely output a setpoint, wait for it to settle, and take a measurement. The main difference with pulse testing is that the source returns to a bias level after a short pulse duration. In most cases, bias level is set in order to turn off the DUT (for example, 0V or 0A).
Under ideal conditions, the pulse sequence and DC sequence in the above two graphs return the same IV data. However, as previously mentioned, the DC sequence dissipates more heat through the DUT, which can cause abnormal behavior and yield poor test results. This is why pulse testing is preferred for these types of applications.
When testing in pulse mode, the pulse width should be long enough for your device to reach a full on state to take settled measurements, but short enough to minimize self-heating of the DUT. The importance of a fast, clean SMU response is magnified when pulsing because the SMU is always starting from the pulse bias level instead of gradually increasing the output in small, incremental steps.
Depending on the impedance of your DUT and the desired pulse characteristics, the transient response of the SMU can either be too fast or too slow. When the response is too fast, the output overshoots or becomes unstable, potentially causing damage to the DUT. When the response is too slow, the SMU never reaches its desired output during the pulse on-time. In both of these extremes, the SMU doesn’t settle fast enough to take a measurement and you must extend the pulse width. This slows the overall test sequence and increases the heat dissipation in the DUT.
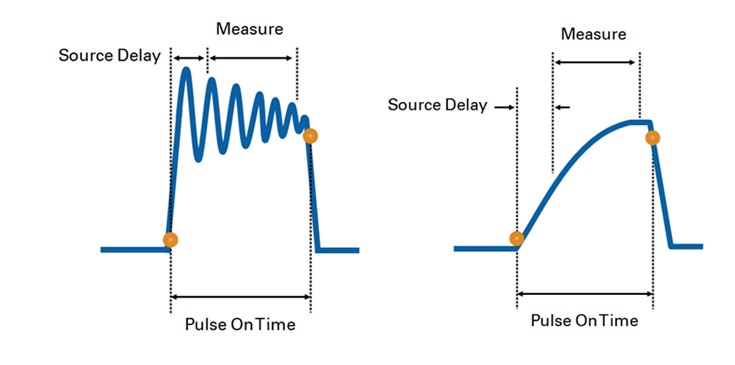
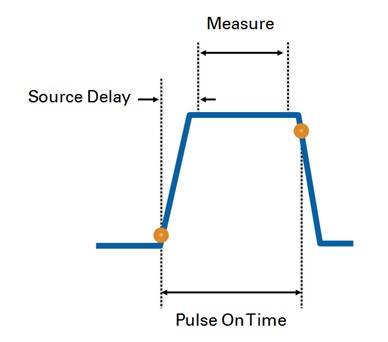
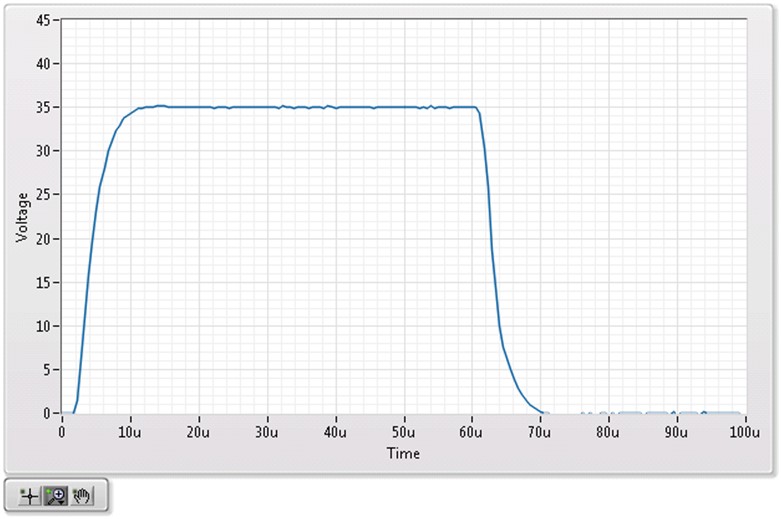
When generating very narrow pulses, it’s critical to avoid the two situations above because they give you poor IV data. To ensure the SMU generates a clean pulse, such as in the figure below, you need to capture the detailed transient characteristics of the response with an instrument that can sample fast enough. This is traditionally served with an external oscilloscope; however, certain newer SMUs have built-in digitizer features.
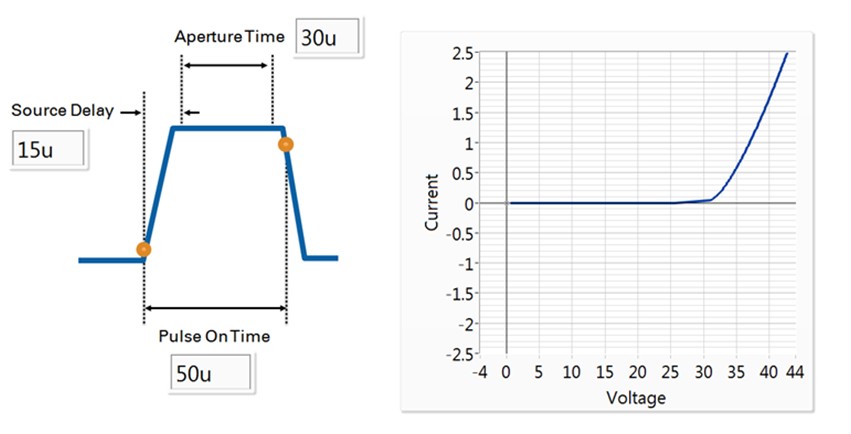
Another advantage of digitizing the pulse is that it gives you the ability to visualize the required source delay and measure window (aperture time). SMUs typically start measuring immediately after the source delay, so optimizing this value is critical for pulsing. If the source delay is too short, the SMU starts measuring while the output is still ramping, giving you incorrect data. If the source delay is too long, the measure window shrinks and the measurement accuracy is reduced.
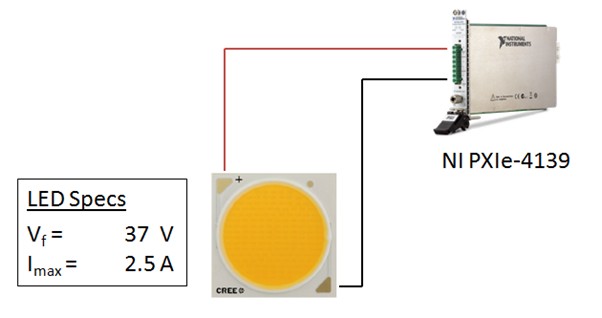
To demonstrate pulsing with an SMU, we’re going to use the NI PXIe-4139 to characterize a high-power LED from CREE. Because of the IV requirements of the LED (37 Vf, 2.5 Imax), we need to operate the SMU in the extended pulsing boundary, which gives us the ability to pulse up to 500 W compared to the traditional 20 W DC boundary.
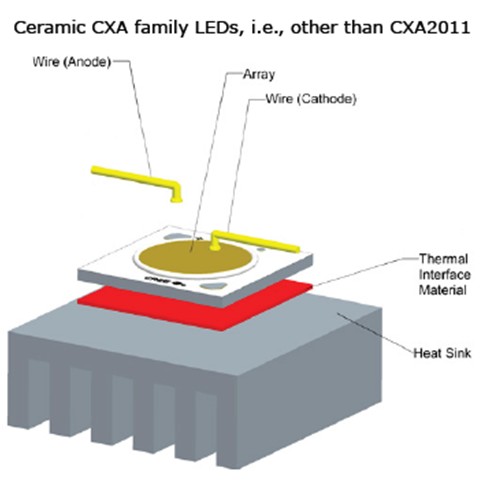
For the IV characterization of this LED, we’re going to sweep current into the LED from 0 to 2.5 A. Characterizing this LED with a traditional DC sequence presents two challenges. First, we would need to connect several SMUs in parallel to achieve the required current and voltage for the IV sweep. The additional SMUs not only complicate the setup from a wiring and programming perspective, but also increase the cost and size of the test system. Secondly, we would be sourcing up to 100 W of power into this small LED. Without installing a heat sink, as recommended in the figure below, we would damage this LED by applying a DC source for too long. Using the SMU in pulsed mode avoids these two challenges by giving us the ability to perform a full IV sweep on the LED with a single instrument and no external heat sink.
To execute the test as fast as possible while minimizing heat dissipation through the LED, we will use the minimum pulse width, which is 50 µs, for the instrument. Creating usable 50 µs pulses is challenging, so to ensure we get clean, stable pulses from the SMU, we’re going to use two unique features of the NI PXIe-4139. First, we’ll use the instrument as a digitizer to examine the detailed transient characteristics of the pulse. Secondly, we’re going to use NI SourceAdapt technology to customize the pulse for a fast rise time with no overshoot or oscillations.
When generating high-power, narrow pulses, it’s important to ensure the SMU response is fast and stable. The SMU used in this example, NI PXIe-4139, has a built-in digitizer mode that can sample up to 1.8 MS/s, so we can use the measure function of the same SMU to digitize the output. Without this feature, you need an external oscilloscope that can measure both current and high voltage.
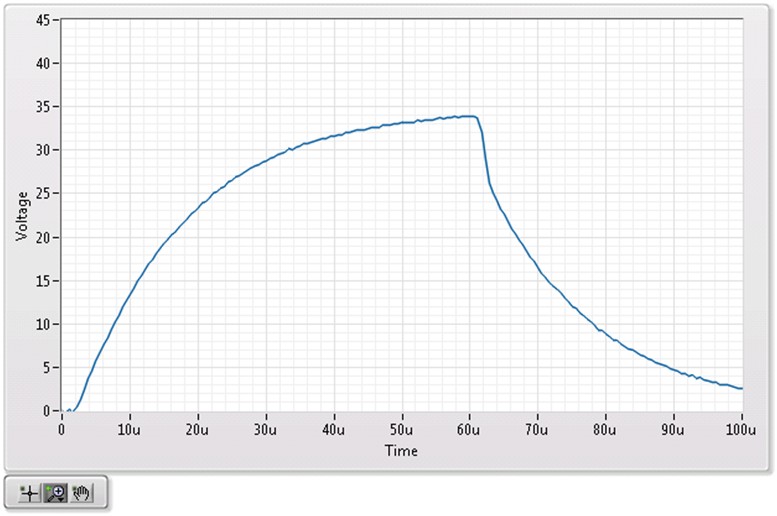
Digitizing the SMU pulse gives you the ability to examine the detailed pulse characteristics and verify the SMU can take an accurate measurement at each step in the sequence. In this case, we can see that the SMU doesn’t settle within the 50 µs window, so we cannot accurately acquire IV data with these settings. At this point, we need to either extend the pulse on-time or adjust the response of the SMU.
The NI PXIe-4139 is equipped with technology called NI SourceAdapt, which gives you the ability to customize the transient response of the SMU. In this example, we need to use this feature to improve the rise time of the pulse while maintaining a stable response with no overshoots.
The figure above shows the pulse characteristics after adjusting the SourceAdapt settings. By looking at the pulse above, we can determine the necessary settling and aperture time of the SMU, and feel confident that the final IV sweep will return accurate data. The graph below shows the SMU sweeping from 0 to 2.5 A, and measuring the voltage and current at each point of the sequence.
Pulsing is an incredibly useful subset of SMU functionality that gives you the ability to test high-power devices without complicating your test setup with multiple SMUs and heat sinks. Because of these advantages, many test engineers prefer pulsing to traditional DC sequences. When developing tests with high-power pulses, the SMU response, pulsing specifications, and the ability to examine the pulse characteristics are all essential in acquiring good IV data.