Integrating GPIB, Ethernet/LXI, USB, PXI Express, VXI, and Other Standards into a Hybrid Test System
Overview
With emerging instrument control standards based on communications buses such as USB and LAN including LXI, developers face the question of how to integrate these instruments into their systems. Stand-alone instrumentation has continued to evolve by taking advantage of newer buses and standards such as USB and LXI, giving users a variety of instrumentation connectivity, each with its own strengths. At the same time, a test system might feature modular instrumentation buses such as VXI, PXI or PXI Express for applications that require software flexibility, low latency, and high throughput. Thus, for various reasons, developers might need to combine multiple buses or integrate additional buses into their test systems. By taking advantage of hybrid test systems that combine components from multiple platforms, they can easily integrate new buses into existing test systems to help balance design considerations, take advantage of various technologies, and extend the life of their systems. To integrate platforms such as PXI, PXI Express, VXI, GPIB, USB, LAN/LXI, and Serial into one system, developers need to select the right the software framework , which is vital to ensuring successful integration and ease of flexibility in adjusting to changing instrumentation buses.
Contents
- Hybrid Test Systems
- Stand-alone Instrumentation Buses: GPIB, USB, and LAN including LXI
- Modular Instrumentation Buses: VXI, PCI, PXI, PCI Express, and PXI Express
- Importance of Software Framework
- Summary
Hybrid Test Systems
When designing test systems, developers often have a variety of considerations to balance. To meet system needs, they can create hybrid systems to take advantage of various test platforms. For instance, a system might require the software flexibility and high throughput provided by modular instrumentation buses such as VXI, PXI, PXI Express, and PCI Express as well as the specialized functionality in a stand-alone instrument like those based on USB or LAN including LXI. Hybrid test systems combine components from multiple ATE platforms such as PXI, PCI, GPIB, VXI, USB, or LAN/LXI into one system. In addition, by using hybrid systems, engineers can easily integrate new components into their existing setups without a complete redesign.
The key to creating these hybrid test systems is to design the system with an extensible layered architecture that helps to streamline maintenance and upgrades. By designing hybrid multiple platform test systems with the five-layer architecture shown in the figure, developers can clearly separate hardware from software. This simplifies the integration of multiple platforms and eases maintenance and upgrades by requiring only minor changes in specific layers as opposed to redesigning the system to accommodate new components. The architecture starts from the bottom with the Device I/O Layer, which contains the individual instruments used that can be based on multiple instrumentation buses including PXI, VXI, USB, or LAN/LXI. Moving up the architecture, the Computing Layer includes the embedded and remote controllers used to control modular instrumentation and connect to different stand-alone buses. Above sits the Measurement and Control Services Layer with the hardware and instrument drivers that bridge the hardware to software. The fourth layer, the Application Layer, is composed of the individualized test programs such as a digital multimeter measurement or a power spectrum. The architecture ends with the System Management Layer that offers a framework to call the test programs as well as log data, generate reports, and manage users.
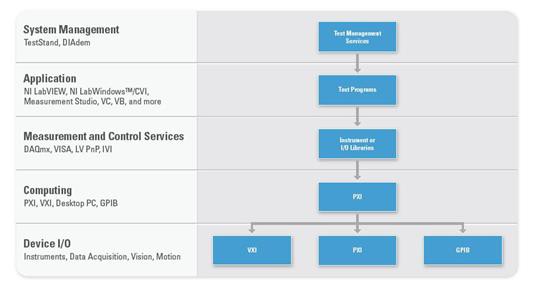
VXI, PXI, USB, and LAN/LXI and extend systems with new technologies.
Stand-alone Instrumentation Buses: GPIB, USB, and LAN including LXI
A variety of instrumentation buses – GPIB, USB, LAN including LXI, and serial – are available for stand-alone instruments. These buses have different strengths, which makes some more suitable for applications than others. With GPIB, users benefit from a proven instrumentation bus technology and a wide variety of instrumentation. In USB, users can take advantage of the wide availability and ease of connectivity. With LAN/LXI, users can meet their distributed needs and address distance needs. With the variety of instrumentation buses available, users can select the appropriate instrument for their needs based on factors such as measurement functionality, bandwidth, latency, performance, and connectivity.
GPIB – Designed specifically for test and measurement and instrument control applications, the General Purpose Interface Bus (GPIB) has been a robust and reliable communication bus for 30 years and is still going strong. Using a parallel bus, GPIB provides an instrumentation bus with low latency. The IEEE 488.2-1987 revision strengthened the standard by defining precisely how controllers and instruments communicate through GPIB. In addition, the IEEE 488.1-2003 revision defined a high-speed data transfer mode, increasing the bandwidth by eight times to give users 8 MB/s bandwidth for GPIB instrument control. Not a PC industry bus, GPIB is rarely natively available on a PC. Instead, users typically use a plug-in board, such as the NI PCI-GPIB, or external converters, like the GPIB-USB, to add GPIB instrument control functionality to their PCs. Providing a wide breadth of instrumentation with nearly 10 million devices on the market, GPIB has long been a prevalent and trusted communication bus for stand-alone instruments.
USB – The Universal Serial Bus (USB) has become a popular communication bus choice for stand-alone instruments due to its ubiquity on PCs, its plug-and-play ease of use, and its high-bandwidth capabilities. With the widespread availability of USB ports on computers, developers can take advantage of the easy connection and configuration to quickly integrate USB-based instruments in their systems. The release of USB 2.0 established a new category of high-speed devices that can reach a maximum transfer rate of 480 Mb/s and reduced the minimum frame latency from 1 ms to 250 µs. In addition, the USB Test and Measurement Class (USBTMC) specification addresses the communication requirements of a broad range of test and measurement devices, from simple sensors to mainframes with multiple measurement functions. The USBTMC sets a protocol built on top of USB that allows GPIB-like communication with USB devices so that from the user’s point of view, the USB device behaves just like a GPIB device. For example, developers can use the VISA Write function to send the “*IDN?” query and the VISA Read function to retrieve the response. The USBTMC protocol supports service requests, triggers, and other GPIB-specific operations.
LAN Including LXI – A mature technology, LAN (Local Area Network) is typically used in test systems in nonmeasurement capacities including general networking and remote data storage. LAN is ideally suited for distributed systems and remote monitoring. With wide availability on computers today, LAN has grown in popularity as a communication bus for stand-alone instruments. Because LAN can support long cable lengths using switches, routers, and repeaters, users do not have to keep instrumentation local and can distribute stand-alone instruments throughout a network. In addition, the VXI-11 specification provides a standard set of protocols for communication with message-based instruments over TCP/IP. Part of the VXIbus set of specifications, the VXI-11 specification defines a network instrument protocol for controller-device communication over a TCP/IP network. The LXI (LAN eXtensions for Instrumentation) standard defines classes of instruments based on LAN and includes optional synchronization based on IEEE 1588 technology as well as optional triggering specifications with the LXI trigger bus. LXI instruments are a subset of LAN stand-alone instruments. When applying these additional specifications of the LXI standard, users can add a level of timing and synchronization to low-frequency distributed and remote monitoring systems.
With all of these instrumentation buses, users still face the same challenges they see with any stand-alone instrument. While stand-alone instruments can be beneficial in that they might offer specialized functionality or performance, these instruments are vendor-defined, proprietary instruments. As a result, developers face limited integration and expandability and are forced to work with a proprietary software model.
Modular Instrumentation Buses: VXI, PCI, PXI, PCI Express, and PXI Express
With modular instrumentation, developers can take advantage of open, multivendor standards and software flexibility to create a user-defined solution for their specific application needs. By using a modular architecture and open standards, they can easily integrate components from multiple vendors into one system and scale the system as needed. With high throughput, low latency, and software flexibility, developers can create a user-defined test system that is able to meet many application performance needs. Modular instrumentation buses deliver better throughput and latency in comparison to stand-alone instrumentation buses, which helps with many application needs like high-speed data streaming. By taking advantage of an open software model and PC processing power, users can extract all the measurements they require from the data provided by modular instruments. This gives users the flexibility to design a system as needed and pay only for the components required for the application.
VXI – The VXI Consortium was formed in 1987 with a charter that defined a multivendor instrument-on-a-card standard. Since that time, the consortium has defined system-level components required for hardware interoperability. The IEEE officially adopted the VXI specification, IEEE 1155, in March 1993. The VXIplug&play Systems Alliance, founded in September 1993, sought a higher level of system standardization to cover all VXI system components. By focusing on software standardization, the alliance defined standards to make VXI systems easy to integrate and use while maintaining multivendor software interoperability. With the success of multivendor standards and solid technical specifications, VXI is backed by more than 250 vendors, with more than 1000 products available. The success of VXI as an open, multivendor platform is a testament to the value of multivendor standards.
VXI is used in many different applications ranging from test and measurement and ATE to data acquisition and analysis in both research and industrial automation. Although some VXI systems today are purely VXI, many users are migrating to VXI by integrating it into existing systems consisting of GPIB instruments, VME cards, or plug-in data acquisition boards. Users can control a VXI system with a remote general-purpose computer using the high-speed Multisystem eXtension Interface (MXI) bus interface or GPIB. They can also embed computers into VXI chassis and control the system directly. Whatever a user’s system configuration needs may be, VXI offers the flexibility and performance to take on today’s most challenging applications.
PCI and PXI – Introduced in the early 1990s, PCI was first implemented as a chip-to-chip interconnect to replace the fragmented ISA bus. The PCI bus offered several advantages over previous bus implementations including processor independence, buffered isolation, bus mastering, and true plug-and-play operation. Typically not used directly for instrument control, the PCI bus serves as a peripheral bus to connect GPIB or serial devices for instrument control. Also, due to its high bandwidth, PCI is used as a carrier bus for modular instruments where the I/O bus is built into the measurement device.
PXI combines PCI electrical-bus features with the rugged, modular, Eurocard mechanical packaging of CompactPCI and adds specialized synchronization buses and key software features. This makes it both a high-performance and low-cost deployment platform for test, measurement, and control systems. These systems serve applications such as manufacturing test, military and aerospace, machine monitoring, automotive, and industrial test. With PCI-based communication, PXI benefits from low latency and high throughput at 132 MB/s. In addition, PXI provides additional timing and triggering with a 10 MHz reference clock, an eight-line trigger bus, and STAR trigger lines that feature dedicated trigger lines with intermodule skew within 1 ns. PXI is heavily used as a platform for modular instrumentation, offering an attractive alternative to traditional stand-alone instrumentation through compact, high-performance measurement hardware devices with integrated timing and synchronization resources.
PCI Express – As PC applications become more bandwidth-intensive, the PCI bus is reaching its physical limits in many situations. As a result, the PCI-SIG, the standards body that defines PCI, has introduced PCI Express, with the main goals of providing a scalable, low-cost interface that serves many different markets and delivering compatibility at the software level with existing PCI card drivers and software. Compatibility with the PCI addressing model is maintained to ensure that all existing applications and drivers operate unchanged. An evolution of PCI, PCI Express provides a basic communication lane of 250 MB/s in each direction in a x1 implementation and up to 4 GB/s in a x16 implementation. In addition, by connecting each PCI Express slot to a switch fabric, PCI Express offers independent bandwidth to each slot as opposed to the shared bandwidth in PCI. Designed with compatibility needs in mind, PCI Express uses a well-designed layered architecture to ensure compatibility with future generations as well as software compatibility with PCI. As with PCI, PCI Express is typically not used directly for instrument control but as a peripheral bus to connect GPIB devices to PCs for instrument control. Because of its tremendous speed, PCI Express can be used as a carrier bus for modular instruments.
PXI Express – As its use of PCI in the communication backplane helped drive the rapid adoption of PXI, PXI Express has the ability to meet even more application needs by integrating PCI Express into the PXI standard. By taking advantage of PCI Express technology, PXI Express increases the available PXI bandwidth from 132 MB/s to 6 GB/s for a more than 45 times improvement in bandwidth while maintaining software and hardware compatibility with PXI modules. With this enhanced performance, PXI can reach into many new application areas, many of which were previously served only by expensive and proprietary hardware. With the software compatibility of PCI Express, the standard software framework provided by PXI will carry into PXI Express. To provide hardware compatibility, the new CompactPCI Express specification defines a new hybrid slot that gives engineers the ability to install modules with either a PCI or PCI Express architecture in a slot. With this technology, engineers and vendors can preserve their existing investments in PXI systems and products through both hardware and software compatibility.
Importance of Software Framework
Hybrid systems enable the combined use of modular instrumentation buses and commercial bus interfaces for stand-alone instruments so that users can benefit from the high speed and flexibility of modular instrumentation and use existing or specialized stand-alone instruments. The software framework employed is vital to ensuring the successful integration of these various platforms into one system and the ease of flexibility to adjust to changing instrumentation buses. With the growth of commercial buses, the software layers of the hybrid architecture are becoming even more important. Because commercial buses by definition change very quickly, the software layer becomes more important by offering a layer of abstraction to adapt and keep up with changing commercial buses.
An integral part of the software framework is the Measurement and Control Services layer, which includes flexible device drivers that bridge hardware and software and simplify configuration and integration of hardware with the test code. To seamlessly integrate hardware into software, engineers need drivers that offer fast performance, programming flexibility, and a consistent and scalable application programming interface (API). The Virtual Instrument Software Architecture (VISA) standard provides a common API to communicate with the driver software independently of the instrumentation bus used. VISA delivers a standard set of function calls to communicate with instruments based on PXI, VXI, GPIB, LAN/LXI, and so on. By offering controller interchangeability and bus interchangeability, VISA helps developers interchange the controllers used. In addition, instrument drivers are a critical piece of the application because they abstract instrument functionality in an appropriate way for use in the application development environment. A standard for instrument drivers, Interchangeable Virtual Instrument (IVI) drivers are useful for instrument replacement since they allow engineers to interchange instruments in a system without modifying test software for specified classes of instruments such as oscilloscopes or switches. An IVI instrument driver that conforms to one of these classes may be substituted with another instrument of the same class, regardless of manufacturer or bus connection. For instance, by using IVI drivers, a developer could use the same code to communicate with a PXI, VXI, GPIB, or LAN/LXI instrument.
Summary
With hybrid test systems, users can combine modular instrumentation buses with peripheral buses for stand-alone instrumentation. By taking advantage of new instrumentation buses such as PXI and PXI Express or USB and LAN/LXI instruments, developers can use hybrid test systems to integrate multiple platforms into one system. With the ability to mix platforms, developers can use the high speed, flexibility, and customizable software available with modular instrumentation buses in conjunction with stand-alone instrumentation. The key to successfully integrating instruments based on buses such as PXI, USB, or LAN/LXI in a system is taking advantage of the software architecture and abstraction available through tools like VISA and IVI. With this software, even as commercial buses change, users have a layer of abstraction that minimizes the effect of changing buses.