





5G 引領推動無線測試的新紀元
5G 必須仰賴新的測試方法,才能讓 5G 產品和解決方案確實做到商用化,並且能夠適用於許多產業和用途。

隨著 5G 設計測試案例的數量與複雜度與日俱增,工程團隊必須簡化作業,才能符合緊迫的市場期限。NI 與 5G 市場領導者合作,開發出現代化實驗室方法,可提高工程效率。透過將快速、可靠的開放式量測軟體,結合精確 DC 與寬頻 RF 等緊密同步儀器的模組化工作台,讓我們能夠為各種實驗室職務提供強大的工程工作流程,從互動式上線與除錯,到豐富的自動化驗證與特性分析作業等等,一應俱全。

焦點解決方案
透過 NI 強大的應用軟體與 PXI 儀器組合,可讓您加快將寬頻 5G RF 前端上線、除錯與驗證的作業。透過簡單易用的 GUI 即可控制 DC、數位與 RF 儀器,而且完全不需要進行程式設計。在評估線性、輸出功率、效率與調變品質等重要 RF 放大器參數的同時,也能執行最新的線性化演算法。

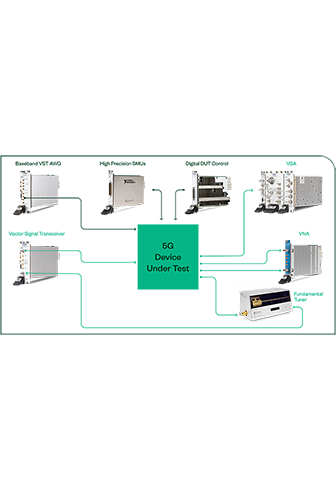
NI 的量測導向軟體可控制多通道 DC、數位、類比與寬頻 RF 測試儀器,進而簡化互動式與自動化的 5G 設計驗證序列作業。
獲得「如同駕駛艙」的工具控制功能
強化驗證工作流程
執行亞毫微秒的同步化與觸發作業
測試多 RF 通道 MIMO 作業

我們檢視了哪些因素會使實驗室中的特性分析流程速度變慢,隨後發現使用傳統儀器的 RF 量測作業最為耗時。但採用 PXI 後,我們無需犧牲品質,即可大幅改善測試產能。
行動 5G 業務開發總監
Qorvo
NI 合作夥伴網路為全球社群,由頻域、應用與測試專家組成,並與 NI 合作以滿足您的需求。NI 合作夥伴是值得信賴的解決方案業者、系統整合商、顧問、產品開發人員,以及服務與銷售通道專家,擁有多種產業與應用領域的豐富技能。

NI 合作夥伴為獨立於 NI 之外的商業實體,與 NI 之間不具有任何經銷、合作夥伴或合資關係。

