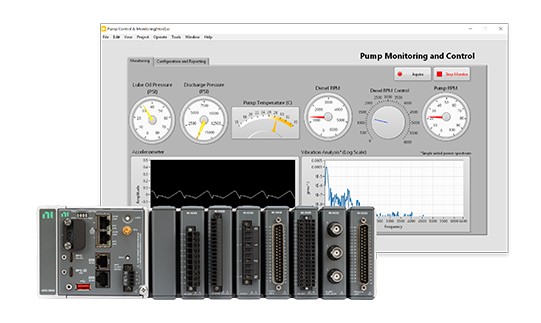


Le matériel CompactRIO fournit une solution industrielle de contrôle et de surveillance utilisant des modules d’E/S conditionnés spécifiques aux capteurs ou aux protocoles avec des capacités en temps réel.
Excellent pour
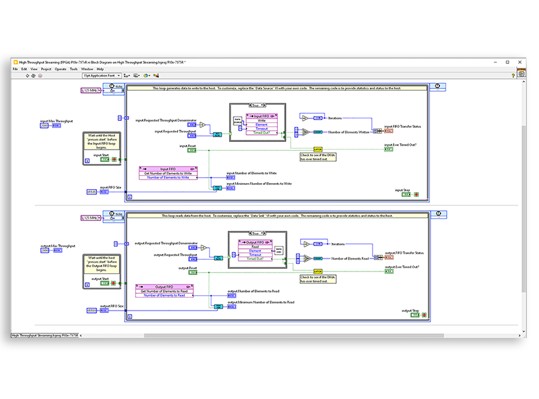
Traitement des besoins en temps réel
Applications de surveillance et de contrôle industriels
Tests à long terme sur le terrain