EV 파워트레인 테스트의 과제와 솔루션
개요
자동차의 전동화가 계속 가속화됨에 따라 자동차 엔지니어는 기존의 파워트레인으로는 불가능했던 배터리 전기 자동차 (BEV) 파워트레인의 새로운 테스트 과제를 해결해야 합니다.
전력 컨트롤을 공급하기 위한 몇 가지 테스트베드 접근 방식이 있습니다. 여기서는 이러한 접근 방식과 새로운 차량 추진 서브시스템 테스트에 NI의 차세대 배터리 에뮬레이터를 사용할 때의 이점에 대해 설명합니다.
내용
- 전기 자동차 (EV) 파워트레인이란?
- BEV 파워트레인 테스트의 새로운 과제
- 일반적인 테스트 설정: 다이나모미터, DC 버스 및 최신 배터리 에뮬레이션 사용하기
- 첨단 BEV 파워트레인에서 전력 및 전압 레벨 변경
- RINT 모델: 정확하게 배터리 특성 시뮬레이션
- NI의 유연한 솔루션
- 요약
- 다음 단계
전기 자동차 (EV) 파워트레인이란?
처음에 EV 파워트레인은 엔진 (모터), 트랜스미션, 연료원 (가솔린), 기계적 프레임을 갖추고 있어 기존의 추진 시스템과 상당히 유사해 보였습니다. 최근에 진행된 개발에는 내연 기관 (ICE)을 하나 이상의 전기 모터로 대체하고, 새로운 형태의 트랜스미션 및 토크 제어를 사용하고, 향상된 에너지 저장 장치 (배터리)를 연료 소스로 사용하는 것이 포함됩니다.
모터, 트랜스미션 및 프레임을 포함한 모든 새로운 파워트레인 구성요소는 높은 신뢰성을 보장하기 위해 혹독한 조건에서 엄격한 테스트를 거칩니다.
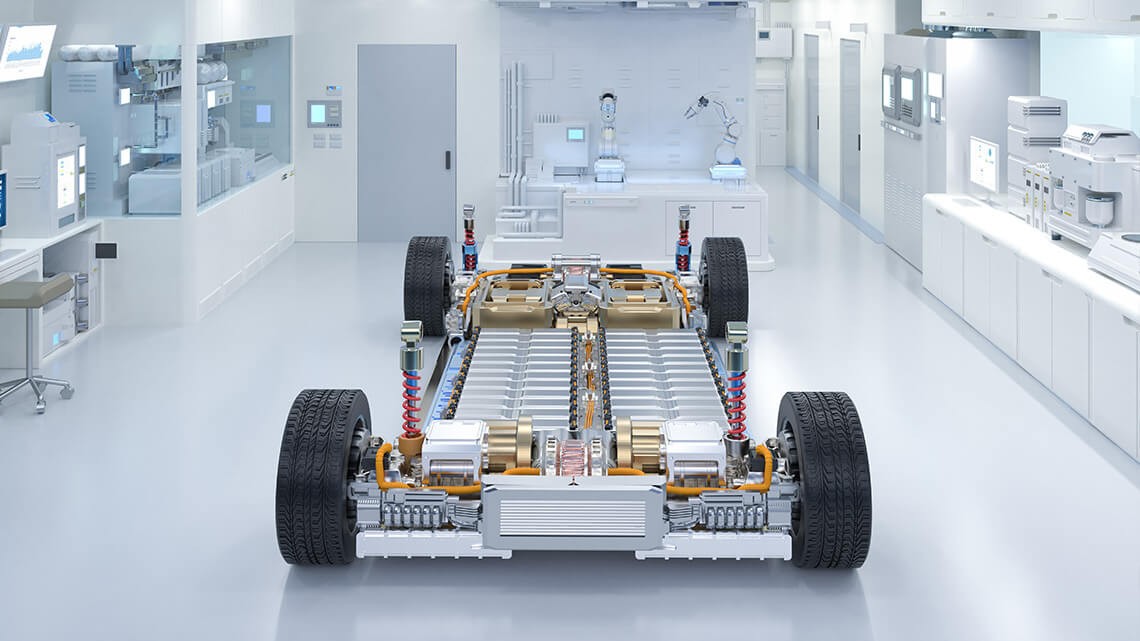
그림 1. 최신 EV 섀시 및 파워트레인; 이미지 제공: Lucid Motors
BEV 파워트레인 테스트의 새로운 과제
첨단 추진 시스템 아키텍처는 근본적으로 다르며 새로운 과제와 다양한 위험을 안고 있습니다. 기존의 추진 시스템과 비교할 때 EV 파워트레인은 다른 안전 사항을 고려해야 합니다.
일반적인 작동 시 기존의 연소 기반 파워트레인에는 석유 기반 연료가 필요하기 때문에 유독 가스가 배출되므로, 사용되는 연료와 배출 가스를 둘 다 주의해서 억제해야 합니다. 이에 반해 EV 파워트레인은 정상 작동 시 유해 물질이나 유독 가스를 배출하지 않지만 고전압 교육, 고정 장치 및 취급과 같은 추가적인 안전 사항을 고려해야 합니다. 또한 실제 배터리를 사용하여 모터 및 기계 시스템을 테스트하면 고장의 위험이 있으며, 고장 난 디바이스에서는 유독 가스와 부식성 액체가 배출될 수 있습니다. 또한 발열로 인해 연기, 화재 또는 폭발이 발생할 수 있습니다.
간단히 말해, 에너지 저장 구성요소를 대체하는 배터리 에뮬레이터를 사용하여 이러한 위험을 완화하는 것이 더 합리적입니다. 이 방법을 사용하면 안전성이 향상되고 테스트 시간이 단축되며 보다 반복 가능한 결과를 얻을 수 있습니다.
일반적인 테스트 설정: 다이나모미터, DC 버스 및 최신 배터리 에뮬레이션 사용하기
센서, 변속기 또는 기타 기계 디바이스와 같은 구성요소를 테스트할 때 드라이브 모터와 함께 테스트 스탠드 (테스트베드)를 사용하는 것이 일반적입니다. 이 설정을 사용하면 모터 및/또는 엔진의 기계적 동력과 두 번째 구동 모터를 시뮬레이션하여 바퀴의 기계적 부하 및/또는 관성을 시뮬레이션할 수 있습니다.
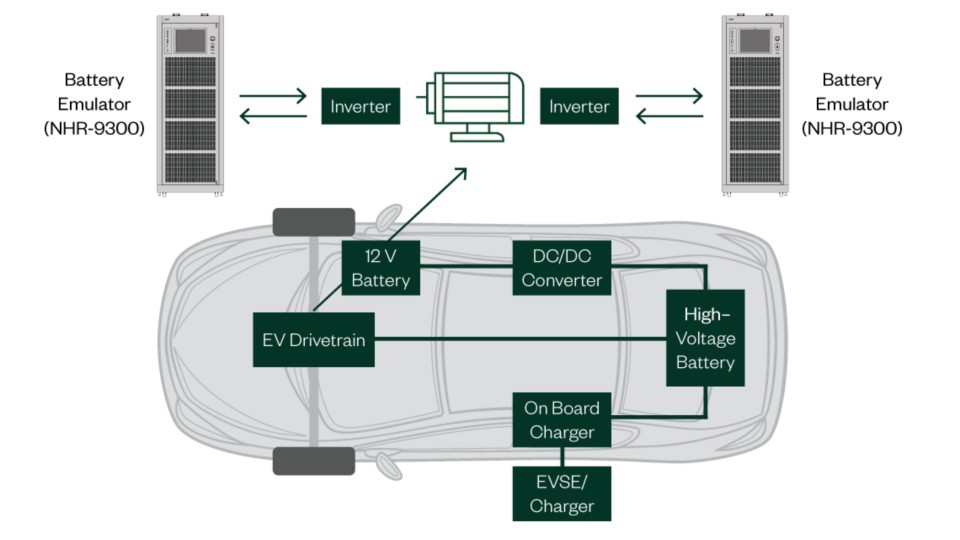
그림 2. EV 블록다이어그램
전체 스케이트보드를 테스트할 때 드라이브 모터가 스케이트보드에 포함되며, 바퀴를 시뮬레이션하려면 보조 모터만 있으면 됩니다. 이 두 번째 설정을 다이나모미터 또는 줄여서 “Dyno”라고 합니다. Dyno는 수년 동안 기존 ICE 차량을 테스트하는 데 사용되었습니다.
마찬가지로, 전원이 한 방향으로 흐르는 초기 EV 파워트레인 덕분에 기존의 전원 공급 장치를 사용할 수 있었습니다. 기존의 전원 공급 장치는 배터리처럼 작동할 수 있으며, 기존의 Dyno를 사용하여 보조 드라이브 모터를 로드하여 생성되는 기계적 전력을 흡수할 수 있었습니다.

그림 3. 공통 DC 버스
이러한 초기 EV 파워트레인 테스트 접근 방식은그림 3과 같이 일반 DC 버스 토폴로지로 빠르게 발전했습니다. 이 토폴로지는 전력을 열 (폐기물)로 발산하는 대신 전력을 수집하고 재사용하려고 시도합니다. UUT 또는 다른 디바이스 등 하나 이상의 단방향 디바이스를 기반으로 하기 때문에 실패 또는 성능 제한은 전체 테스트 설정을 위반합니다.
또한 감속 또는 시뮬레이션된 엔진 제동 중 역기전력(back-EMF)이 발생하면 디바이스가 손상될 수 있습니다. 마지막으로, 입력과 출력 사이에 절연이 없으면 노이즈, 하모닉 또는 기타 불안정성이 DC 버스와 출력 또는 입력에 각각 영향을 미칠 수 있습니다. 이러한 모든 요인으로 인해 테스트 결과가 쉽게 왜곡되고 거짓 파워트레인 조건이 발생할 수 있습니다.
앞에서 설명한 기존 방법과 달리,NI의 첨단 배터리 에뮬레이션은 배터리의 에너지 저장 및 휠 전원에 대한 실제 조건을 더욱 정확하게 시뮬레이션하는 고유한 양방향 솔루션을 제공합니다. 그림 4와 같이 이 양방향 접근 방식은 입력과 출력을 절연하여 테스트 설정에서 단일 실패 지점을 제거하고 UUT에서 생성된 모든 역기전력을 자동으로 수용합니다.
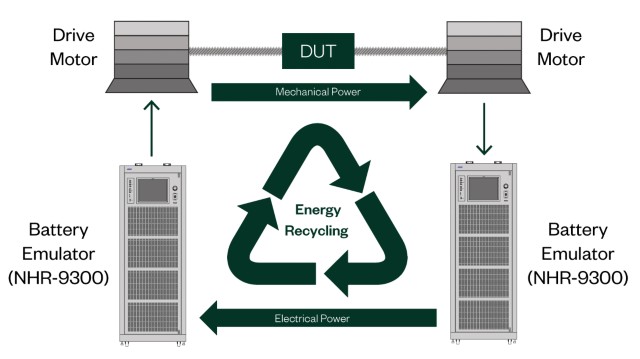
그림 4. 파워트레인 배터리 시뮬레이션
그림 3의 공통 DC 버스에 비해 그림 4의 개별 입력 및 출력 경로는 테스트에서 불확실성을 제거하고 테스트 엔지니어가 자신있게 성능 파라미터를 분석할 수 있도록 합니다. 이 접근 방식은 회생 제동, 엔진 관성 에너지 수집 및 양방향으로 짧은 순간의 전력 흐름이 필요한 기타 상황에서 특히 중요합니다.
첨단 BEV 파워트레인에서 전력 및 전압 레벨 변경
전력 및 전압 레벨은 기존의 300/400 VDC 레벨에서 800/1000 VDC로 전환하는 중입니다. 전압이 높아지면 더 빠르게 충전할 수 있고 더 많은 전력을 전송할 수 있으며 동시에 차량의 무게까지 줄일 수 있습니다.
예를 들어, 2019년에 사용 가능한 대부분의 BEV는 공칭 전압이 ~350 VDC인 Tesla의 Model 3와 GM의 Chevy Bolt와 비슷했지만, Porsche는 더 높은 800 VDC 배터리 시스템을 사용하는 Taycan 아키텍처를 발표했습니다. 이렇게 높은 전압을 사용하면 같은 크기의 와이어로 거의 3배의 추가 전력을 전송할 수 있습니다. Porsche는 350 kW로 충전하는 IONITY 시스템을 통해 이를 시연했는데, 이는 다른 "고속" 충전 네트워크를 통해 가능한 120 kW의 거의 3배입니다.
800 V 및 350 V 차량 모두 전기 전용 충전소에서 현재 가솔린 및 디젤 자동차와 같은 방식으로 충전할 것으로 예상됩니다.
많은 고전력 테스트 시스템이 단일 범위에 대해서만 설계되기 때문에 엔지니어는 전원 요구사항을 지정할 때 두 가지 전압의 차종이 존재하는 현실을 염두에 두어야 합니다. 기존 전압 레벨과 고전압 레벨을 모두 제공할 수 있는 시스템을 선택하면 적합한 장비로 현재 및 미래의 요구사항에 적절하게 대응할 수 있습니다. 배터리 에뮬레이션 시스템이 전기 저장 시스템 (배터리)을 정확하게 시뮬레이션하기 위해서는 전류 또는 전력 소모의 변화에 신속한 전압 응답으로 반응하는 것도 중요합니다.

그림 5. Source and Load Circa 2006을 사용하는 자동화된 테스트 시스템
자동차 제조업체는 "주행거리 불안"을 줄이기 위해 차량의 배터리 팩의 상대적인 용량을 크게 늘렸습니다. 예를 들어, 2019 Nissan Leaf는 이전 40 kW 모델에 비해 50% 더 큰 배터리를 탑재하고 있으며, Tesla의 Model S는 원래 표준 크기 배터리보다 66% 더 큰 100 kW 배터리를 제공합니다.
배터리 용량과 배터리 성능은 계속 개선되고 있으므로, 엔지니어는 배터리 에뮬레이션 솔루션을 선택할 때 유연성과 프로그래밍 가능성을 고려해야 합니다. 특히, 테스트 엔지니어는 저항을 사용하지 않거나 고정된 저항 값을 사용하여 타협하는 것을 원하지 않을 것입니다. 타협하게 되면 모든 테스트는 현재의 배터리를 정확하게 시뮬레이션하지 못하고 미래의 개선된 배터리를 정확하게 시뮬레이션하지 못할 것입니다.
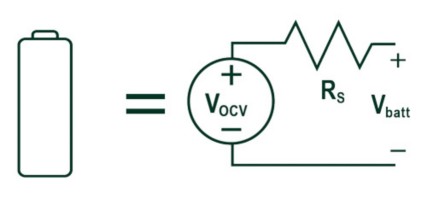
그림 6. RINT 모델 (다른 모델과 비교)
RINT 모델: 정확하게 배터리 특성 시뮬레이션
내부 저항 (RINT) 모델은 내부 연결, 접촉기 및 안전 구성요소에 의해 생성된 추가적인 팩 저항과 함께 배터리의 내부 내화학성을 시뮬레이션합니다.
그림 6에서 보여주는 것처럼 RINT 모델은 진정한 양방향 전원 공급
(Vocv)과 프로그램 가능한 직렬 저항(Rs)으로 구현할 수 있습니다. 이 모델은 파워트레인 시스템을 테스트할 때 배터리 기반 저항 및 팩 저항의 주요 특성을 이해하기에 충분합니다.
수학적 모델의 수가 늘어나는 동시에 배터리의 전기화학적 특성을 이해하기 위해 보다 복잡한 모델이 사용됩니다. 이러한 특성은 배터리 팩의 전체 저항과 비교할 때는 전체 시스템에 거의 영향을 미치지 않는 미묘한 차이입니다.
NI 배터리 에뮬레이터는 전자적으로 프로그램 가능한 "배터리 에뮬레이션" 모드를 제공하는 동등한 RINT 모델을 제공합니다. 두 개의 간단한 항 (Vocv 및 Rs)만 있으면 배터리 에뮬레이션은 전류 (Icharge)의 방향과 레벨에 따라 터미널 전압 (Vbatt)을 자동으로 조정합니다.
Vbatt = Vocv + Rs * Icharge
직렬 저항 효과의 성능 데모 (RINT 모델)
실제 배터리에서처럼 NHR의 배터리 에뮬레이터는 전류 흐름의 방향과 진폭에 따라 출력 전압을 조정합니다.
전류는 그림 7에서 빨간색으로 표시되며, 시뮬레이션 배터리 (50 A)에서 끌어온 전류에서 시작하여 더 높은 전류 (100 A)로 증가하고 마지막으로 0으로 떨어집니다. 출력은 5 m2의 저항을 시뮬레이션하도록 설정되었습니다. 출력 전압 (파란색으로 표시)은 이러한 전류 변화를 추적하고 적절한 터미널 전압 강하를 제공할 때 출력을 보여줍니다. 출력 전압의 자동 조정은 특히 일반적인 DC 버스 및 소스/로드 시뮬레이션 시스템과 비교할 때 실제 배터리 팩 특성을 더 정밀하게 시뮬레이션합니다.
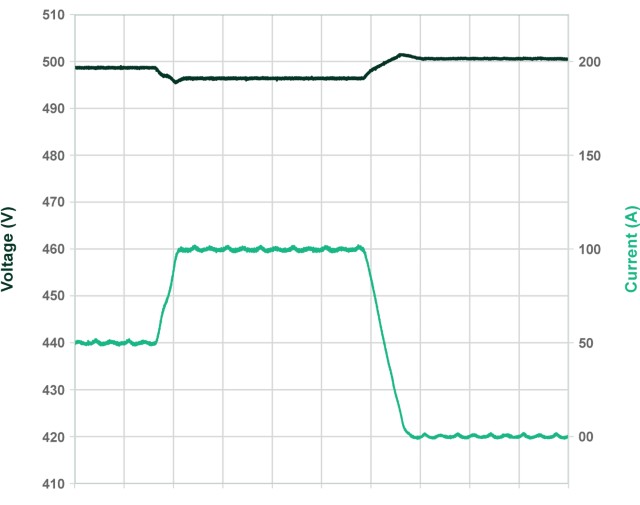
그림 7. RINT 모델의 성능
NI의 유연한 솔루션
NI의 배터리 에뮬레이션 시스템은 모듈형이며 테스트 요구사항에 필요한 전압 및 전류 레벨을 충족합니다. 고전력 모델은 이중 범위를 제공하므로 장비가 오늘날의 배터리를 에뮬레이션할 수 있도록 하고 배터리 전압 및 전력의 증가에 따라 적절한 도구를 제공합니다.
또한 NI는 광범위한 소프트웨어 컨트롤 옵션을 제공하므로 이 전력단을 다이나모미터 및 기타 테스트 시스템 구성요소와 완전히 통합할 수 있습니다.
모듈성
모든 NI 배터리 에뮬레이션 시스템은 완전히 독립적으로 작동하도록 설계되었으며, 병렬 연결이 가능하여 최대 전력 및 전류 용량을 필요한 수준까지 높일 수 있습니다. 병렬 연결을 통한 이러한 모듈식 확장 덕분에 현재의 적용 수준으로 테스트를 시작할 수 있으며, 향후 필요할 경우 추가 전원을 사용할 수 있습니다.
예를 들어, 그림 8에서처럼 시스템 3개를 개별 테스트 채널 3개로 작동하거나, 테스트 채널 1개를 3배의 전력으로 작동하거나, 시스템 1개는 2배 전력으로 작동하고 나머지 시스템은 별도의 테스트 채널로 작동하는 2채널로 구성할 수 있습니다. NHR-9300은 이러한 방식으로 최대 12개 채널을 결합하여 총 2.4 메가와트의 최대 전력을 제공합니다.
시스템은 전체 시스템을 교체할 필요 없이 현재의 요구사항과 미래의 전력 수준에 맞는 크기로 미래에도 사용할 수 있습니다.

그림 8. 미래에도 경쟁력을 갖춘 시스템
또한 NI는 광범위한 전압 옵션을 갖춘 저전력 시스템을 제조합니다. 모듈형 NHR-9200 중전압 DC 배터리 모듈 사이클러 및 에뮬레이터는 8 kW 또는 12 kW 블록 크기로 확장할 수 있으며 40 V~600 V DC의 전압 옵션을 제공합니다. 이 시스템은 동일한 드라이버, 터치 패널 컨트롤 및 소프트웨어 옵션을 사용하므로 고전력 및 저전력 배터리 에뮬레이션 시스템 모두에 이상적입니다.
이중 범위
일반적으로 특정 용도에 맞춰 설계되는 경쟁 시스템과 달리 NI 고전력 테스트 시스템은 그림 8과 같이 이중 범위를 제공하여 장기적인 가치를 보장합니다. 모듈당 최대 100 kW 전력은 고전류 범위에서는 300 V~600 V, 고전압 범위에서는 600 V~1200 V에서 사용할 수 있습니다. 이중 범위 덕분에 오늘날의 EV 드라이브 트레인 (400 V~500 V)과 차세대 모델 (800 V~1000 V)을 동일한 자본설비를 사용하여 쉽게 테스트할 수 있습니다.
손쉬운 통합: 소프트웨어 제어 옵션 및 통합 파트너
모든 NI 배터리 에뮬레이터는 기존 테스트 플랫폼에 쉽게 통합되거나 새로운 테스트 플랫폼의 전력단으로 사용할 수 있습니다. 이를 위해 NI는 예제, 어플리케이션 및 통합 지원과 함께 IVI 또는 SCPI 언어를 사용하여 완벽하게 문서화된 드라이버를 제공합니다.
또한 NI는 NI 하드웨어에 대해 잘 알고 있으며 턴키 테스트 시스템을 제공할 수 있는 여러 통합 파트너를 보유하고 있습니다. 이 통합업체는 고객이 지정한 하드웨어 센서와 고정 장치 구성요소를 사용하여 완전 맞춤형 시스템을 개발합니다.
정확한 배터리 시뮬레이션 및 에너지 절약
모든 NI 배터리 에뮬레이터는 가장 정확한 배터리 시뮬레이션을 제공하기 위해 RINT 모델 또는 직렬 저항 효과를 구현합니다. 또한 NI 배터리 에뮬레이션 솔루션은 회생 솔루션이기 때문에 시스템에 흐르는 모든 전력이 깨끗하고 사용 가능한 시설 전력으로 재활용됩니다.
요약
EV 파워트레인은 계속해서 진화하고 있으며 새로운 테스트 과제를 안고 있습니다. 급속 충전과 차량 성능 때문에 전압과 전력 레벨이 달라지고 있습니다. 기존의 파워트레인 테스트 접근 방식은 단점과 한계가 있는 단방향 디바이스에 의존합니다. 최신 배터리 에뮬레이션은 절연된 양방향 접근 방식이며 역기전력을 처리할 수 있으며 보다 견고한 토폴로지입니다.
NI는 다음 기능을 갖춘 차세대 배터리 에뮬레이션 솔루션을 제공합니다.
- 변화하는 전압 요구사항을 처리할 수 있는 유연성
- 향후 전력 레벨에 대응할 수 있는 확장성
- 배터리를 보다 정확하게 시뮬레이션하기 위한 직렬 저항 모델
- DC 전원 공급 장치보다 빠른 응답 시간
- 손쉬운 통합 및 소프트웨어 제어
- 에너지 비용 절감

표 1. EV 파워트레인 테스트 접근 방식 요약