



Next
21/1OO
ZF's Bold Vision for a Safer Tomorrow
How one company is shaping the next generation of mobility.

There’s no sweeter sound than “Ding, dong!” followed by “Your pizza is here.” But is that the local delivery driver at your door or a robot in a supercomputer on wheels?
In the modern era, humans have aspired to incorporate innovative technologies in automobiles—think the advent of aerospace or the idea of flying cars and drones. Autonomous vehicles, robotaxis, and true self-driving cars are no longer mythological inventions. The future is here, so to speak, and we are constantly changing the way we think about transportation and the transfer of goods. Pilot programs for food delivery robotic drivers are being deployed in cities like Austin. The accelerating demand for online deliveries spurred by the global pandemic, supply chain pressures, and increasing traffic congestion is generating a new sense of urgency in companies to find alternatives to traditional vehicles.
While some of this technology may be at our fingertips now, it still comes with roadblocks, quite literally and figuratively. Questions remain about how we can safely and efficiently combine human drivers with robotic drivers and autonomous cars on the road given various complexities: How can robots navigate different terrains, such as concrete sidewalks, pebbles, and gravel? How can a robotic driver bridge the “last mile” and deliver goods directly to a doorstep instead of just arrive at curbside, especially when a customer needs extra assistance?
Robotic food delivery vehicles are becoming an increasingly common sight in cities like Ann Arbor and Austin
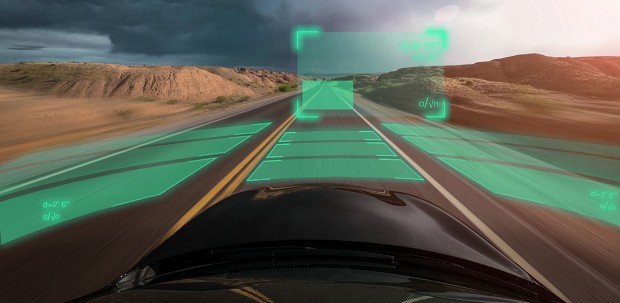
Using rigorous test and measurement processes in different scenarios is critical to increasing the development of artificial intelligence and machine learning in vehicles with smart computers. Autonomous vehicles work by perceiving their environment through sensors and using the data from the sensors to plan which way to go and what action to take. Increasing the capabilities of the sensors and systems in a vehicle can improve its overall performance.
Finding failure helps us understand the limitations or the threshold of current technology. We can then analyze the failures to make machines smarter and more trainable for navigating complex situations and eventually remove the human decision-making factor as much as possible.
The uncovering of more unknowns and failures in autonomous vehicles is key to turning public fear into trust. Vehicle testing involves, to some extent, infinite test cases or ways of doing something to see if a vehicle fails. Conducting validation tests on advanced driver-assistance systems (ADAS) and autonomous driving vehicles using simulation tools makes it easier to account for as many real-world scenarios as possible, determine current system capabilities, and deliver safer vehicles to market faster.
Autonomous vehicle sensors and decision-making algorithms must be prepared to deal with near infinite real world scenarios
Educating the public about the nuances of vehicle capabilities is also critical to accelerating the adoption of innovative vehicles. For example, though the SAE Levels of Driving Automation scale assigns “self-driving” a narrow, technical definition, the term is often thrown around in marketing too casually, which can create confusion. Truly self-driving cars are the highest vision of the autonomous vehicle labeled under SAE levels 4 and 5. Cars fitting in the level 4 and 5 categories may not even have a steering wheel or an accelerator or brake pedals. Level 4 cars, which include most robotaxi and robotic delivery service vehicles, require no driver attention. They can safely abort or change course when needed but in more limited circumstances. Level 4 cars need specific input to navigate certain environments. Level 5 cars require no human intervention and can drive in all conditions and places.
More visibility into the test processes for self-driving cars can increase the public’s understanding that vehicles must meet a series of rigorous standards before they’re deemed self-driving cars. This visibility can also build a more positive attitude toward the evolution of the industry.
In addition to improving safety systems to anticipate and avoid dangerous scenarios before they happen, more cities are adopting regulations that align with Vision Zero, a proactive, preventive approach to prioritizing traffic safety, eliminating collisions, and increasing mobility equitably. Preventing collisions is also a metric of just how innovative a new transportation technology really is. Having this technology in hand is one thing, but ensuring it can be driven on the road legally, be easily understood, and be democratized in terms of accessibility and inclusivity creates more complexities.
Driverless robotaxis are another autonomy application that could change the future of mobility
As the use of robotic delivery pilot programs increases in cities, we’ll find further test cases to determine the advantages these robot drivers offer, such as reducing congestion and emissions and improving efficiency and productivity. Finding failure points in these pilot programs may also further inform the opportunity cost for deploying robotic, autonomous, and driverless technologies on a larger scale. However, implementing these programs will take time and require a massive cultural shift. Accelerating adoption will require collaboration through many different social, political, and financial avenues, but we can learn from test-run mistakes to build a safer tomorrow.

