From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
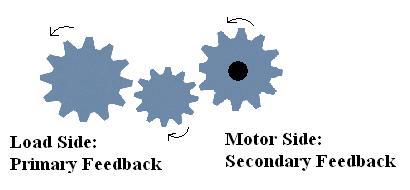
运动控制系统经常使用传动来增加力矩,分辨力,或者将旋转运动转换为线性运动。使用传动可能会将后冲引入到系统中。后冲在负载和电机运动存在延迟时会发生,导致位置精度和系统稳定性的降低。
对于一个运动轴使用两个位置传感器,或者说编码器可以有助于解决后冲问题。传动前,将一个传感器放在负载端,另一个放在电机端。在负载端的传感器作为主反馈用作速度回馈,如果将负载端的编码器反馈用作速度回馈,系统后冲会导致正确速度的延迟响应。电机端可用于校正这个问题,并被用作次反馈。
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||