From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
NI a lancé son premier FlexDMM PXI en 2002. Ce produit a permis aux ingénieurs de dépasser les limites inhérentes aux instruments de précision traditionnels, à savoir le débit de mesure et la souplesse. Le FlexDMM a permis de relever ces défis en fournissant un débit de mesure comparable à celui des multimètres numériques (DMM) de plus haute résolution qui coûtent souvent des milliers de dollars de plus. NI a continué d’innover en matière d’architecture FlexDMM depuis son lancement grâce :
La dernière innovation est le FlexDMM 7 chiffres ½ NI PXIe-4081. Le FlexDMM PXIe-4081 offre 26 bits de précision et de résolution, soit 10 fois plus de résolution et jusqu’à 60 % de précision en plus que le matériel FlexDMM précédent. Le PXIe-4081 offre également des gammes de mesure extrêmement larges, comme le montre le tableau 1. Il est ainsi possible de mesurer la tension continue de ±10 nV à 1000 V, le courant de ±1 pA à 3 A, la résistance de 10 µΩ à 5 GΩ, ainsi que de relever des mesures de fréquence/période et de diode. Le FlexDMM dispose d’un mode numériseur isolé dans lequel il est possible d’acquérir des formes d’onde couplées en CC à des fréquences d’échantillonnage allant jusqu’à 1,8 Méch./s dans tous les modes de tension et de courant. Ce document établit une comparaison détaillée des convertisseurs analogiques/numériques (C A/N) et des architectures du FlexDMM et des DMM traditionnels.
PXIe-4081
| PXIe-4080/4082
| |
| Résolution max | 7½ chiffres (26 bits)
| 7 chiffres (23 bits)
|
| Gammes de tension | ||
| CC maximum | 1 000 V
| 300 V
|
| Sensibilité CC | 10 nV
| 100 nV
|
| Valeur efficace CA maximale (crête) | 700 Veff (1 000 V)
| 300 Veff (425 V)
|
| Tension de mode commun | 500 V
| 300 V
|
| Gammes de courant | ||
| CC maximum | 3 A
| 1 A
|
| Sensibilité CC | 1 pA
| 10 nA
|
| Valeur efficace CA maximale (crête) | 3 A (4,2 A)
| 1 A (2 A)
|
| Sensibilité - Veff CA | 100 pA
| 10 nA
|
| Gammes de résistance | ||
| Maximum | 5 GΩ
| 100 MΩ
|
| Sensibilité | 10 µΩ
| 100 µΩ
|
| Gammes LCR1 | ||
| Capacité | N/A
| 0,05 pF à 10 000 µF
|
| Inductance | N/A
| 1 nH à 5 H
|
| Coût | 3 690 USD
| 2 406/3 209 USD
|
Tableau 1. Comparaison des entrées FlexDMM
1 PXIe-4082 uniquement. Envisagez l’appareil PXI de mesure de LCR pour d'autres options de mesure d'inductance et de capacité.
Les DMM traditionnels se concentrent généralement sur la résolution et la précision et n’offrent pas de capacité d’acquisition à haute vitesse. Il existe bien sûr une limite inhérente aux performances en matière de bruit par rapport à la vitesse, ce qui est une fonction de la physique de base. Le bruit thermique de Johnson d’une résistance est un exemple de limite théorique, et la technologie des périphériques à semi-conducteurs impose certaines limites pratiques. Il existe toutefois de nombreuses autres options pour aider à obtenir les meilleures performances de mesure possibles.
Certains DMM spécifiques à haute résolution offrent à la fois une résolution et des vitesses un peu plus élevées. Ils sont toutefois très coûteux (près de 8 000 USD) et ne sont disponibles que dans des configurations pleine baie qui sont très encombrants pour le système ou l’espace de table.
Une autre limite de la vitesse des DMM découle de la plate-forme matérielle traditionnelle : le bus d’interface GPIB (IEEE 488). Cette interface, utilisée depuis les années 1970, est souvent considérée comme la norme malgré ses inconvénients en termes de vitesse, de flexibilité et de coût. La plupart des DMM traditionnels « en boîtier » utilisent cette interface, bien que d’autres normes soient désormais disponibles en option, telles qu’USB et Ethernet. Toutes ces interfaces communiquent avec le DMM en envoyant des messages à l’instrument et en en attendant une réponse, ce qui est intrinsèquement plus lent que l’accès basé sur les registres utilisé pour les instruments modulaires PXI.
Malgré de premières tentatives pour abandonner l’interface GPIB, la limite de base des DMM en termes de vitesse et de précision reste les C A/N utilisés dans ces produits. Pour mieux comprendre les technologies utilisées, il faut examiner de plus près ce qu’elles offrent en termes de performances.
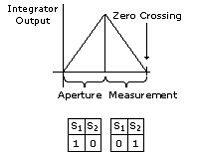
Historiquement, l’une des formes les plus anciennes et les plus courantes de conversion A/N de précision est le C A/N à double pente. Cette technique est largement utilisée depuis les années 1950. Il s’agit essentiellement d’un processus en deux étapes. Tout d’abord, une tension d’entrée (représentant le signal à mesurer) est convertie en courant et appliquée à l’entrée d’un intégrateur par l’intermédiaire du commutateur S1. Lorsque l’intégrateur est connecté à l’entrée (au début du cycle d’intégration ou de l’ouverture), celui-ci suit une rampe ascendante jusqu’à la fin du cycle d’intégration ou de l’ouverture, moment auquel l’entrée est déconnectée de l’intégrateur. Ensuite, un courant de référence connu et précis est connecté à l’intégrateur par l’intermédiaire du commutateur S2 et celui-ci suit une rampe descendante jusqu’à atteindre zéro. Pendant ce temps, un compteur haute résolution mesure le temps nécessaire à l’intégrateur pour ralentir depuis son point de départ. Ce temps mesuré, relatif au temps d’intégration et à la référence, est proportionnel à l’amplitude du signal d’entrée. Voir la figure 1.
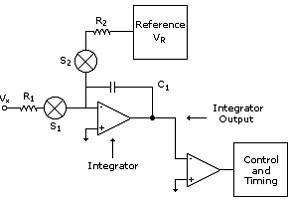
Cette technique est encore utilisée aujourd’hui pour de nombreux multimètres numériques haute résolution. Elle présente l’avantage de la simplicité et de la précision. De longues périodes d’intégration permettent d’augmenter la résolution jusqu’aux limites théoriques. Cependant, les limites de conception suivantes affectent en fin de compte les performances du produit :
Certaines topologies utilisent une étape de transconductance avant l’intégrateur pour convertir la tension en courant, puis elles ont recours à des réseaux de « direction de courant » pour minimiser l’injection de charge. Malheureusement, cette étape supplémentaire est source de complexité et d’erreurs.
Malgré ces limites de conception, les convertisseurs à double pente ont été utilisés dans une grande variété de DMM allant des outils de table ou de terrain les plus courants aux DMM haute précision et haute résolution de qualité métrologique. Comme pour la plupart des techniques d’intégration A/N, ils présentent l’avantage de fournir une réjection du bruit relativement bonne. Le réglage de la période d’intégration sur un multiple de 1/PLC (fréquence de la ligne de courant) amène l’A/N à rejeter le bruit de fréquence de la ligne, ce qui est souhaitable.
De nombreux fabricants surmontent les problèmes d’absorption diélectrique et de vitesse inhérents aux convertisseurs à double pente grâce à la technique A/N à équilibre de charge avec rampe descendante. Cette technique est fondamentalement similaire à celle de la double pente, mais applique le signal de référence par incréments quantifiés pendant le cycle d’intégration. Elle est parfois appelée « modulation ». Chaque incrément représente un nombre fixe de comptes finaux. Voir la figure 2.
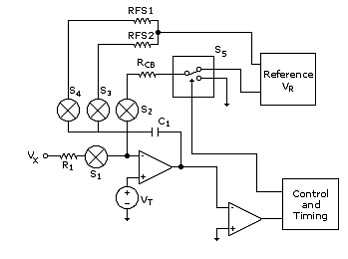
Pendant cette phase d’intégration, représentée sur la figure 2 par touverture, S1 est activé et Vx est appliqué via R1, ce qui démarre la rampe de l’intégrateur. Un courant opposé est appliqué à intervalles réguliers par les commutateurs S2 et S3. Cela « équilibre » la charge sur C1. Des comptes de mesure sont générés chaque fois que S5 est connecté à VR. En fait, pour les mesures à plus haute résolution (temps d’intégration plus longs), la plupart des comptes sont générés pendant cette phase touverture. À la fin de la phase d’équilibre de charge, un courant de référence de précision est appliqué à l’intégrateur, comme pour le convertisseur à double pente. L’intégrateur suit ainsi une rampe descendante jusqu’à zéro. La mesure est calculée à partir des comptes accumulés lors de l’intégration et ajoutée aux comptes pondérés accumulés pour la rampe descendante. Les fabricants utilisent deux références de rampe descendante ou plus, d’où des rampes descendantes rapides pour optimiser la vitesse, puis des « rampes finales » plus lentes pour la précision.
Le C A/N à équilibre de charge avec rampe descendante permet d’améliorer considérablement les problèmes d’absorption diélectrique du condensateur de l’intégrateur, mais ses performances sont similaires à celles du convertisseur à double pente. (En fait, certains convertisseurs à double pente utilisent plusieurs rampes descendantes.) La vitesse est considérablement améliorée car le nombre de comptes générés pendant la phase d’équilibre de charge réduit l’impact de toute erreur liée à la rampe descendante. La descente peut donc être beaucoup plus rapide. Cependant, un temps mort significatif persiste si pour un relevé de plusieurs mesures ou la numérisation d’un signal, en raison de la désactivation et de la réactivation de l’intégrateur.
Ce type de C A/N, commercialisé depuis les années 1970, a considérablement évolué. Les premières versions utilisaient un modulateur similaire à celui d’un convertisseur tension-fréquence. Elles présentaient des problèmes de linéarité dus à des effets parasites liés à la fréquence et étaient donc limitées en termes de vitesse de conversion. Au milieu des années 1980, la technique a été améliorée pour intégrer un modulateur à « fréquence constante », qui est encore largement utilisé aujourd’hui. Ceci a permis d’améliorer considérablement les performances finales et de faciliter la fabrication de ces convertisseurs.
Les convertisseurs sigma-delta, ou C A/N à mise en forme du bruit, trouvent leurs racines historiques dans le domaine des télécommunications. Aujourd’hui, cette technique est largement utilisée comme base pour les blocs A/N disponibles sur le marché et produits par plusieurs fabricants. Ce domaine a connu une évolution significative au cours de la dernière décennie (motivée par un besoin croissant de conversion à gamme dynamique élevée dans l’audio et les télécommunications), et de nombreuses recherches sont toujours en cours. Certains DMM modulaires (PXI(e), PCI(e) et VXI) utilisent aujourd’hui des C A/N sigma-delta au cœur du moteur d’acquisition. Ils sont également couramment utilisés pour numériser des signaux pour :
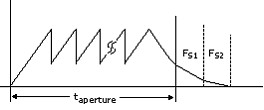
La figure 3 présente le diagramme de base d’un convertisseur sigma-delta.
Les éléments de base d’un convertisseur sigma-delta sont l’intégrateur ou les intégrateurs, un C A/N et un C N/A (convertisseur numérique/analogique) à un bit et un filtre numérique. La mise en forme du bruit est réalisée en associant les étapes d’intégration et la conception de filtres numériques. De nombreuses techniques sont disponibles pour mettre en place ces blocs. Différentes philosophies existent concernant le nombre optimal d’étapes d’intégration, de filtres numériques, de bits dans les convertisseurs A/N et N/A, etc. Cependant, les éléments opérationnels de base restent fondamentalement les mêmes. Un modulateur constitué d’une boucle de rétroaction à équilibre de charge d’un bit est similaire à celui décrit ci-dessus. Le C A/N à un bit, en raison de sa précision et de sa monotonie, ouvre la voie à une très bonne linéarité.
L’utilisation de convertisseurs sigma-delta disponibles dans le commerce présente de nombreux avantages, notamment :
Cependant, l’utilisation de C A/N sigma-delta prêts à l’emploi dans les DMM haute résolution présente certaines limites :
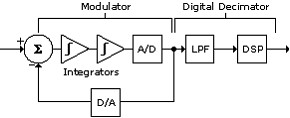
Le FlexADC est le socle de la famille NI FlexDMM (PXIe-4080, PXIe-4081, PXIe-4082). Le FlexADC fournit le bruit, la linéarité, la vitesse et la flexibilité nécessaires pour obtenir des mesures haute vitesse et haute précision. Le FlexADC, présenté à la figure 4, est basé sur la combinaison d’une technologie C A/N haute vitesse prête à l’emploi et d’un convertisseur sigma-delta sur mesure. Cette combinaison optimise la linéarité et le bruit pour une précision et une stabilité allant jusqu’à 7 chiffres ½ tout en offrant des fréquences d’échantillonnage de numériseur allant jusqu’à 1,8 Méch./s.
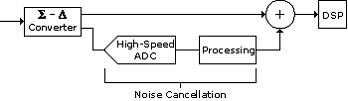
Le diagramme de la figure 4 présente une version simplifiée du fonctionnement du FlexADC. À faible vitesse, le circuit exploite les avantages du convertisseur sigma-delta. Le C N/A de rétroaction est conçu pour un bruit extrêmement faible et une linéarité exceptionnelle. Le filtre passe-bas fournit la mise en forme du bruit nécessaire pour des performances remarquables dans toutes les résolutions. Aucune rampe descendante n’est nécessaire car le modulateur ultra-précis de 1,8 Méch./s assure une conversion à très haute résolution sans celle-ci. À des vitesses élevées, le modulateur 1,8 Méch./s se combine avec le C A/N à échantillonnage rapide pour fournir une numérisation à échantillonnage continu. Le processeur de signal numérique (DSP) assure le séquençage en temps réel, l’étalonnage, la linéarisation, le calcul de la valeur efficace réelle du CA, la décimation, ainsi que le filtrage du bruit pondéré utilisé pour les fonctions CC.
Le FlexADC présente plusieurs avantages :
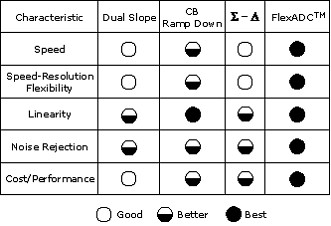
Le tableau 2 compare ces quatre architectures C A/N.
Tous les FlexDMM disposent de références embarquées parmi les plus fiables du marché. En tant que référence de tension, le FlexDMM utilise une référence stabilisée thermiquement sélectionnée et bien connue qui offre des performances inégalées sur le marché. Il en résulte un coefficient de température de référence maximal inférieur à 0,3 ppm/ºC. La stabilité temporelle de ce dispositif est de l’ordre de 8 ppm/an. Aucun autre DMM de cette gamme de prix n’offre cette source de référence et la stabilité qui l’accompagne. C’est pourquoi le FlexDMM offre une garantie de précision de deux ans.
Les fonctions de résistance sont référencées par rapport à une seule résistance de 10 kΩ à feuille métallique hautement stabilisée, conçue à l’origine pour des applications aérospatiales exigeantes. Ce composant présente un coefficient de température garanti inférieur à 0,8 ppm/ºC et une stabilité temporelle inférieure à 25 ppm/an.
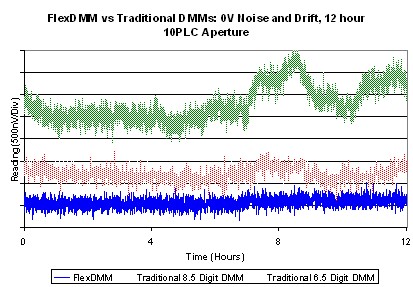
La commutation de relais électromécaniques constitue une source majeure d’erreur de mesure dans la plupart des DMM traditionnels. Les décalages de tension thermique induits par le contact peuvent provoquer une instabilité et une dérive. Les dispositifs FlexDMM éliminent tous les relais sauf un dans le chemin DCV, ACV et de résistance. Une configuration spéciale de relais-contact annule les erreurs thermiques dans ce relais unique. Ce relais ne commute que pendant l’auto-étalonnage. Toute la commutation liée à la mesure pour le changement de fonction et de gamme est effectuée par des commutateurs statiques à faible température et très fiables. Ainsi, les défaillances dues à l’usure des relais électromécaniques sont pratiquement éliminées. La figure 6 montre les performances en matière de dérive pendant la nuit de la gamme la plus sensible, à savoir 100 mV. Chaque division est de 500 nV. À titre de comparaison, la même mesure effectuée dans des conditions identiques avec un DMM traditionnel à 6 chiffres ½ et un DMM à 8 chiffres ½ à rack complet est présentée à la figure 6.
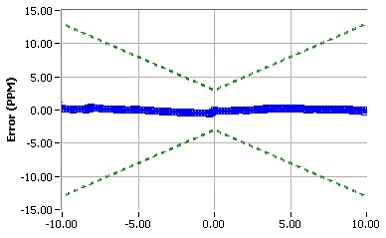
La linéarité est une mesure de la « qualité » de la fonction de transfert d’un DMM. Il est important, dans les applications de caractérisation des composants de conversion, d’offrir des performances DNL et INL (non-linéarité intégrale) nettement supérieures à celles disponibles dans les C A/N du commerce. Le FlexADC est conçu pour une excellente linéarité, à la fois DNL et INL. La linéarité est également importante car elle détermine la répétabilité de la fonction d’auto-étalonnage. La figure 7 montre un tracé typique de linéarité du FlexDMM mesuré sur la gamme de 10 V comprise entre -10 et +10 V.
Les DMM traditionnels à 6 chiffres ½ et 7 chiffres ½ sont étalonnés à une température donnée. Cet étalonnage est caractérisé et spécifié sur une gamme de température limitée, généralement à ±5 ºC (voire à ±1 ºC dans certains cas). Ainsi, chaque fois que le DMM est utilisé en dehors de cette gamme de température, ses spécifications de précision doivent être réduites par un coefficient de température, généralement de l’ordre de 10 %. Ainsi, à 10 ºC en dehors de cette gamme spécifiée, on peut obtenir deux fois l’erreur de mesure spécifiée, ce qui peut être un sérieux problème lorsque la précision absolue est importante.
Si les écarts de température dépassent ces limites et que des spécifications strictes sont requises, un réétalonnage à la nouvelle température est également nécessaire. Prenons, par exemple, la gamme de 10 VCC sur les DMM traditionnels à 7½ chiffres. Un DMM peut présenter la précision suivante :
précision de deux ans : (12 ppm de lecture + 0,5 ppm de gamme) pour T = ±5 ºC de Tautoétal
Avec cette spécification, si l’on applique 5 V à l’entrée programmée pour lire une gamme de 10 V, l’erreur est de :
12 ppm de 5 V + 0,5 ppm de 10 V = 10 µV, pour la gamme de température déterminée lors du dernier auto-étalonnage.
Pour atténuer les erreurs causées par ces effets, tous les FlexDMM intègrent une fonction propriétaire d’auto-étalonnage pour les modes volt en courant continu (VDC), résistance, diode et numériseur. Cette fonction est importante pour les raisons suivantes :
1. La fonction d’auto-étalonnage corrige toutes les erreurs de gain et de décalage du chemin du signal dans le DMM en revenant à la tension de référence interne de précision et de haute stabilité décrite précédemment.
2. L’auto-étalonnage tient compte de toutes les erreurs de source de courant, de gain et de décalage de la résistance. En ce qui concerne la résistance, toutes les erreurs sont corrigées et ramenées à la seule résistance de précision interne de 10 kW.
3. L’auto-étalonnage dure une minute et réétalonne toutes les gammes de tension, de résistance et les fonctions du numériseur. Pour les DMM traditionnels, plus de 10 minutes sont nécessaires pour exécuter cette fonction.
Grâce à l’auto-étalonnage, le DMM est extrêmement précis et remarquablement stable à n’importe quelle température de fonctionnement, bien en dehors des 18 à 28 ºC traditionnels. Pour l’exemple ci-dessus, l’erreur supplémentaire introduite par le coefficient de température utilisant l’auto-étalonnage serait entièrement couverte dans les spécifications de 90 jours et de deux ans et serait de :
tempco = (0,3 ppm de lecture + 0,01 ppm de gamme)/ºC, l’erreur supplémentaire est alors de :
22 ºC x tempco = (6,6 ppm de lecture + 0,22 ppm de gamme) soit une incertitude totale de 35,2 µV. Cette erreur à une température ambiante de 50 ºC est presque quatre fois pire que la précision spécifiée d’un an.
Cela représente une énorme amélioration de la précision sur toute la gamme de température de fonctionnement du FlexDMM. Le tableau 3 résume ces résultats.
|
Condition
|
DMM traditionnel à 7½ chiffres (1 an)
|
FlexDMM 7½ chiffres PXI-4071
(2 ans) |
| Mesure entre 18 et 28 ºC |
160 µV
|
65 µV
|
| Mesure à 50 ºC sans auto-étalonnage |
600 µV
|
111 µV
|
| Mesure à 50 ºC avec auto-étalonnage |
600 µV (pas d’auto-étalonnage disponible)
|
80 µV
|
Tableau 3. Résumé de l’exemple – Analyse d’incertitude, mesure de 5 V sur une gamme de 10 V
L’utilisation du FlexDMM avec auto-étalonnage offre une précision à 50 ºC, ce qui est plus de sept fois supérieur aux méthodes traditionnelles. Le tableau 4 compare l’auto-étalonnage à l’étalonnage traditionnel en usine.
|
Option d’étalonnage
|
Application
|
Quand
|
Avantage en termes de performances
|
| Étalonnage en usine |
Réétalonner la dérive temporelle de
références embarquées Corrige la dérive de planéité CA pour toutes les fonctions |
Tous les 2 ans
|
Intégralité des spécifications
|
| Auto-étalonnage |
Précision de 7 chiffres ½ –
réétalonne le chemin de mesure et le C A/N pour le VCC, la résistance, la diode et le numériseur |
90 jours ou pour un changement de température >1 ºC
|
Spécifications sur les fonctions VCC, résistance, diode et numériseur sur TOUTE la gamme de température de fonctionnement
|
Tableau 4. Comparaison de l’étalonnage
Aucun compromis n’a été fait pour offrir une fonction de tension CC et CA de haute stabilité et de classe métrologique. Plusieurs facteurs permettent au FlexDMM d’atteindre ces performances :
Le NI PXI-4071 permet de mesurer 1 000 VCC et 700 VCA Trms aux niveaux CAT I. Pour mesurer avec précision 1 000 V dans un module PXI ultra-compact, il faut tenir compte de la panne des composants, de l’espacement des tensions, de la conception des atténuateurs et des limites de dissipation de puissance dans le circuit frontal.
Traditionnellement, les DMM utilisent à la fois des atténuateurs de 1 MΩ et de 10 MΩ dans leurs circuits de conditionnement de signal frontaux. Un atténuateur de 1 MΩ, lorsqu’il est utilisé pour assurer le conditionnement d’un signal de 700 VCA, dissipe plus de 0,5 W. Il s’agit d’une exigence difficile à satisfaire pour un composant de précision miniature. Le contrôle des erreurs induites par le coefficient de température est un défi, même pour un composant physiquement encombrant. Il faut donc éliminer le besoin d’un atténuateur de 1 MΩ. Les atténuateurs de 1 MΩ sont également utilisés dans les DMM traditionnels en raison de la large bande passante CA. Les conceptions traditionnelles d’atténuateurs de 10 MΩ ne peuvent pas atteindre le même niveau de bande passante CA que celles des atténuateurs de 1 MΩ.
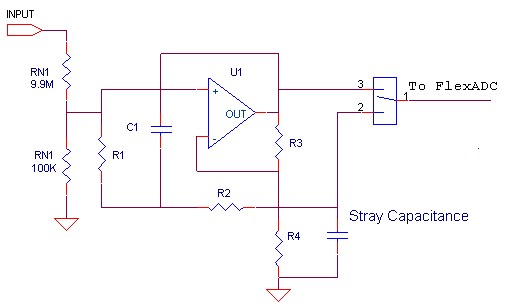
Le FlexDMM PXIe-4081 intègre une conception innovante de bootstrap échelonné pour annuler la capacité de l’atténuateur qui interfère généralement avec les performances à large bande passante. Ce bootstrap, illustré à la figure 8, est conçu et soigneusement disposé pour minimiser la capacité parasite chargeant la branche d’atténuation de 100 kΩ du réseau atténuateur d’entrée RN. L’ajout du bootstrap échelonné formé par R1-R4, C1 et U1 permet d’assurer une réponse indicielle uniforme. Plus important encore, la réponse caractéristique obtenue est très proche de celle d’un RC unipolaire, ce qui est important pour le numériseur et la réponse indicielle CC.
Figure 8. Bootstrap échelonné PXI-4071
Par ailleurs, le PXIe-4081 utilise la correction de planéité numérique CA DSP pour compenser la planéité résiduelle de l’atténuateur sans utiliser de condensateurs de compensation. Ces deux techniques de compensation permettent d’améliorer un ordre de grandeur par rapport aux autres possibilités, étant donné que l’atténuateur unique doit être capable de transmettre des signaux CAeff., des signaux CC de précision et des signaux de numériseur.
L’un des principaux obstacles à la mesure de haute tension est la panne du commutateur de sélection de gamme (relais). Traditionnellement, les DMM utilisent des relais haute tension. Il n’est pas facile de combiner la commutation de relais haute tension et une fiabilité élevée dans un boîtier, et encore moins dans un boîtier miniaturisé.
Pour répondre à ces deux exigences, le PXIe-4081 apporte un nouveau périphérique à semi-conducteurs pour la sélection de gamme capable de supporter bien plus de 1 000 V à l’état désactivé. Ce périphérique ne présente aucun des problèmes de fiabilité traditionnels des relais électromécaniques. En effet, aucun contact ne peut être endommagé par une commutation haute tension et la durée de vie des contacts n’est pas limitée. Le conditionnement du signal d’entrée à l’état solide offre également d’excellentes performances thermiques CC à bas niveau, ce qui constitue une combinaison inédite dans les DMM 1 000 V actuellement disponibles pour moins de 5 000 USD.
En passant à la commutation statique haute tension, en éliminant le besoin d’un diviseur de 1 MOhm et en utilisant le DSP pour éliminer les composants d’étalonnage, il est possible de répondre aux exigences d’espacement de tension grâce à la disponibilité accrue de la surface de la carte et de la zone de masse. Il est maintenant possible d’ajuster la disposition pour répondre aux exigences CAT I pour l’instrumentation PXI 1 000 V.
La réjection du bruit CC est une fonctionnalité exclusive de NI disponible pour les mesures CC sur tous les FlexDMM. Chaque lecture CC renvoyée par le FlexDMM est en fait le résultat mathématique de plusieurs échantillons à haute vitesse. En ajustant la pondération relative de ces échantillons, on parvient à adapter la sensibilité à différentes fréquences parasites. Trois pondérations différentes sont disponibles : normale, de deuxième ordre et d’ordre supérieur.
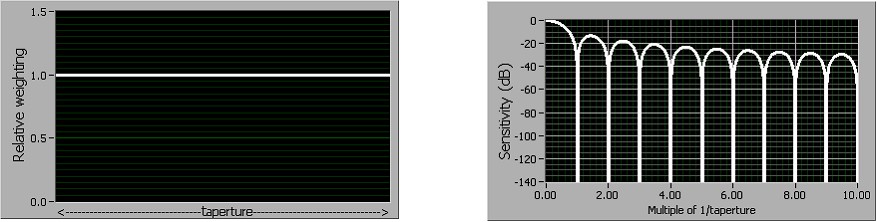
Lorsque l’on sélectionne une réjection de bruit CC normale, tous les échantillons sont pondérés de manière égale. Ce processus émule le comportement de la plupart des DMM traditionnels, offrant une bonne réjection des fréquences pour des multiples de f0 où f0 = 1/touverture, le temps d’ouverture sélectionné pour la mesure. La figure 9 illustre la pondération normale et la réjection du bruit qui en résulte en fonction de la fréquence. Il convient de noter qu’une bonne réjection n’est obtenue que pour les multiples très proches de f0.
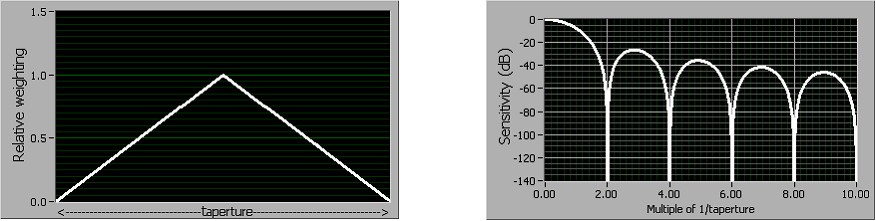
La réjection du bruit CC de deuxième ordre applique une pondération triangulaire aux échantillons de mesure, comme le montre la figure 10. Il convient de noter que l’on obtient une très bonne réjection pour les multiples pairs proches de f0, et que celle-ci augmente plus rapidement avec la fréquence qu’avec une pondération normale de l’échantillon. De plus, les encoches de réponse sont plus larges qu’avec une pondération normale, ce qui réduit la sensibilité aux légères variations de la fréquence du bruit. Il est possible d’utiliser la réjection du bruit CC de deuxième ordre si l’on a besoin d’une meilleure réjection du bruit de la ligne de courant que celle obtenue avec une réjection normale du bruit CC. Toutefois, il n’est pas possible d’échantillonner assez lentement pour profiter de la réjection du bruit d’ordre supérieur. Par exemple, on peut régler l’ouverture sur 33,333 ms pour une fréquence de ligne électrique de 60 Hz.
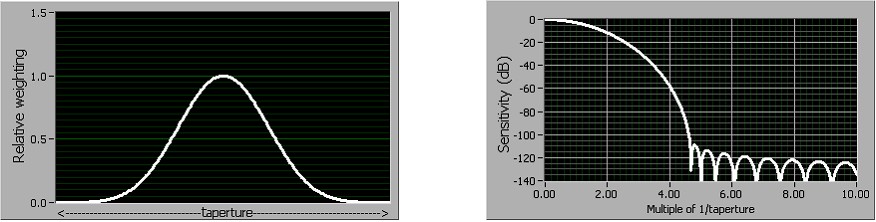
La figure 11 illustre la pondération des échantillons d’ordre supérieur et la réjection du bruit qui en résulte en fonction de la fréquence. Il convient de noter que la réjection du bruit est bonne à partir d’environ 4f0 et excellente au-dessus de 4,5f0. La réjection du bruit CC d’ordre supérieur permet d’obtenir une sensibilité presque nulle au bruit pour toute fréquence supérieure à 4,6f0. Un FlexDMM utilisant une réjection du bruit CC d’ordre supérieur avec une ouverture de 100 ms (10 lectures/s) peut offrir une précision totale à 6 chiffres ½ avec plus de 1 V de bruit parasite de ligne électrique sur la gamme 10 V pour toute fréquence supérieure à 46 Hz. Cela équivaut à une réjection de mode normal >110 dB, insensible aux variations de fréquence des lignes électriques.
Le tableau 5 résume les différences entre les trois réglages de réjection du bruit CC.
| Réglage de la réjection du bruit CC | Fréquence la plus basse pour la réjection du bruit | Réjection du bruit haute fréquence |
| Normale | 1/touverture | Bonne |
| Deuxième ordre | 2/touverture | Meilleure |
| Ordre supérieur | 4/touverture | Meilleure réjection >110 dB |
Tableau 5. Paramètres de réjection du bruit CC
Les signaux alternatifs sont généralement caractérisés par une amplitude efficace, qui est une mesure de leur énergie totale. RMS est l’abréviation de Root-Mean-Square (moyenne quadratique) ; pour calculer la valeur efficace d’une forme d’onde, il faut utiliser la racine carrée de la valeur moyenne du carré du niveau du signal. Bien que la plupart des DMM effectuent ce traitement de signal non linéaire dans le domaine analogique, le FlexDMM utilise un DSP intégré pour calculer la valeur efficace à partir d’échantillons numérisés de la forme d’onde CA. Il en résulte des lectures CA silencieuses, précises et rapides. L’algorithme numérique rejette automatiquement la composante CC du signal, ce qui permet de contourner le condensateur d’entrée à stabilisation lente. Pour mesurer de petites tensions CA en présence de décalages CC conséquents, tels que l’ondulation d’un bloc d’alimentation CC, le FlexDMM propose le mode standard de volts CA, dans lequel le condensateur de couplage élimine le décalage et le FlexDMM utilise la gamme la plus sensible.
L’algorithme rms utilisé par le FlexDMM ne nécessite que quatre périodes (cycles) de la forme d’onde pour une lecture silencieuse. Par exemple, il nécessite une ouverture de mesure de 4 ms pour mesurer avec précision une onde sinusoïdale de 1 kHz. L’avantage de cette technique s’étend aux performances système. Avec les DMM traditionnels, il est nécessaire d’attendre qu’un convertisseur analogique Trms se stabilise avant d’effectuer une mesure. Avec le FlexDMM, il n’y a pas de convertisseur Trms à stabiliser. Il en résulte des vitesses de lecture CA plus rapides, et cet avantage s’applique aux systèmes à commutation.
L’approche numérique du calcul des valeurs efficaces offre également des avantages en termes de précision. L’algorithme est totalement insensible au facteur de crête et peut fournir des lectures exceptionnellement silencieuses et stables. Le FlexDMM garantit une précision CA jusqu’à 1 % de la pleine échelle, contre 10 % pour les DMM traditionnels. De plus, des lectures exploitables peuvent être obtenues même en dessous de 0,1 % de la pleine échelle.
L’extension de la gamme dynamique de mesure de courant des DMM est une exigence pour répondre à la demande croissante des clients. À l’extrémité supérieure, il peut être nécessaire de surveiller les performances de charge de la batterie, du circuit ou du dispositif électromécanique. Les dispositifs électroniques intégrés actuels nécessitent davantage de puissance. Ainsi, le besoin de tester ou de caractériser ces dispositifs à des niveaux supérieurs à 1 A augmente. À l’extrémité inférieure, de nombreuses applications actuelles, telles que les caractéristiques d’arrêt des périphériques à semi-conducteurs, peuvent présenter des niveaux microampères ou nanoampères.
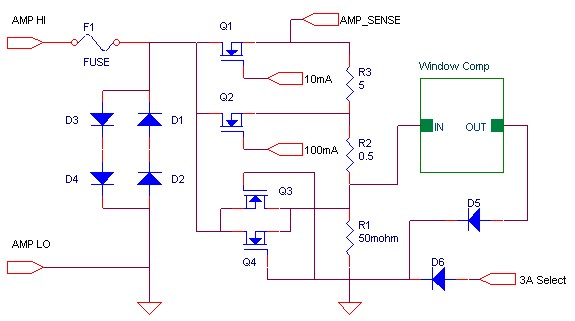
Le PXIe-4081 répond à ces deux besoins en mettant en place une nouvelle configuration de mesure de courant à l’état solide qui fournit huit gammes de courant continu de 1 µA à 3 A et six gammes de courant alternatif efficace de 100 µA à 3 A. La gamme de 1 µA offre une sensibilité allant jusqu’à 1 pA ou 10–12 A. Ces deux extrêmes nécessitent une approche unique de la conception du circuit. Les défis de la protection haute tension ou contre les surcharges de courant et de la mesure des faibles fuites ont toujours été mutuellement exclusifs. Le FlexDMM met en œuvre une approche de conception unique, illustrée à la figure 12. Cette figure très simplifiée montre trois des cinq gammes de courant utilisées pour le PXI-4071.
Figure 12. Conditionnement simplifié du signal de courant PXI-4071
L’utilisation de périphériques à semi-conducteurs pour la sélection de la gamme de courant garantit une fiabilité accrue et une meilleure protection dans un espace physique réduit. De plus, deux des périphériques de sélection de gamme de courant (Q3 et Q4) entrent en jeu lors des surcharges, protégeant ainsi les résistances de détection de courant à haute stabilité et offrant une robustesse pour les applications les plus exigeantes.
Le FlexDMM PXIe-4081 est également capable d’acquérir des formes d’onde couplées en CC jusqu’à une entrée de 1 000 VCC et 700 VCA (1 000 Vp) à une fréquence d’échantillonnage maximale de 1,8 Méch./s. Pour faire varier la résolution du numériseur de 10 à 26 bits, il suffit de modifier la fréquence d’échantillonnage. Grâce à la fonction de numériseur isolé, le FlexDMM peut réduire le coût global du système de test en éliminant la nécessité d’acheter un numériseur séparé et en réduisant la taille du dispositif de test et les frais de maintenance.
En combinant le logiciel de développement graphique LabVIEW avec le mode numériseur isolé du FlexDMM, il est possible d’analyser les transitoires et autres formes d’onde CA haute tension non répétitives dans les domaines temporel et fréquentiel. Aucun autre DMM haute résolution n’offre cette possibilité.
Par exemple, une application courante dans l’industrie automobile est la mesure de la tension de retour sur une bobine d’allumage. La bobine d’allumage, qui crée les hautes tensions utilisées pour alimenter les bougies d’allumage du moteur, est composée d’une bobine primaire et d’une bobine secondaire. La bobine secondaire présente généralement beaucoup plus de tours de fil que la bobine primaire, car le rapport entre les tours et la tension appliquée à la bobine primaire détermine la tension de sortie. Lorsque le courant est brusquement coupé, l’effondrement du champ magnétique induit une tension élevée (+20 000 V) sur la bobine secondaire. Cette tension est ensuite acheminée vers les bougies d’allumage.
En raison des tensions très élevées sur la bobine secondaire, les tests sont en réalité effectués sur la bobine primaire. La forme d’onde de retour est généralement de l’ordre de 10 µs avec une tension de crête de 40 à 400 V, selon la bobine d’allumage. Les mesures courantes effectuées sur cette forme d’onde comprennent la tension maximale d’amorçage, le temps de maintien et le temps de combustion. Grâce à la capacité du numériseur FlexDMM et aux fonctions d’analyse de LabVIEW, il est possible de construire un système de mesure de tension de retour.
Grâce à l’isolation, il est possible de mesurer en toute sécurité une faible tension en présence d’un signal de mode commun important. Les trois avantages de l’isolation sont :
Le FlexDMM dispose d’une suite complète de fonctions de mesure de résistance. Il offre une capacité de mesure de résistance à 2 et 4 fils. La technique à 4 fils est utilisée lorsque de longs câbles de test et une commutation entraînent des décalages de résistance des « fils d’essai » qui rendent les mesures de faible résistance difficiles. Cependant, les tensions de décalage présentent des erreurs importantes dans certaines situations.
Ohms à décalage compensé
Dans ces situations, le FlexDMM fournit des mesures de résistance à décalage compensé et insensibles aux tensions de décalage observées dans de nombreuses applications de mesure de résistance :
Dans le cas 1 ci-dessus, un système de test est souvent construit avec des commutateurs optimisés pour d’autres tâches que les mesures de résistance. Par exemple, les relais Reed sont courants dans les systèmes de test RF en raison de leurs caractéristiques d’impédance prévisibles et de leur grande fiabilité. Dans ce type de système, il peut être souhaitable de mesurer également les résistances des unités testées, et les relais Reed peuvent déjà exister dans le système.
Dans le cas 2, il s’agit par exemple de mesurer la résistance d’un fil de bus d’alimentation sous tension. (Remarque : il faut faire preuve d’une grande prudence lorsque l’on effectue ces tests.) Supposons que la résistance soit de l’ordre de 10 mΩ. Si 100 mA traversent cette résistance, la chute de tension est la suivante :
Un DMM sans compensation de décalage sur la gamme 100 interprète cela comme 1 Ω car il estime que cette tension est générée par sa source de courant interne de 1 mA traversant le fil pour lequel la mesure est relevée. Il ne peut pas faire la différence. Lorsque le FlexDMM et la résistance à décalage compensé sont activés, le décalage de 1 mV est distingué et rejeté, et la valeur correcte de la résistance est renvoyée.
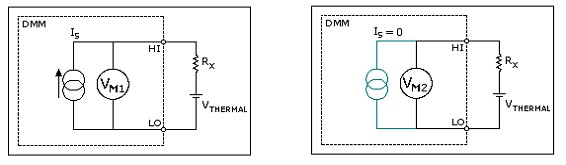
Figure 13. Premier cycle avec courant ACTIVÉ Figure 14. Deuxième cycle avec courant COUPÉ
Cette mesure comporte deux cycles. L’un est mesuré avec la source de courant activée, comme le montre la figure 13. L’autre est mesuré avec la source de courant coupée, comme le montre la figure 14. Le résultat net est la différence entre les deux mesures. Étant donné que la tension de décalage est présente dans les deux cycles, elle est soustraite et n’entre pas dans le calcul de la résistance, comme indiqué ci-dessous.
VOCO = VM1 - VM2 = (ISRX + VTHERMIQUE) - VTHERMIQUE = ISRX
donc :
RX = VOCO/IS
NI a développé le FlexDMM PXI-4081 3U à un seul emplacement hautes performances, basé sur sa technologie FlexADC. De nombreuses fonctions analogiques traditionnellement sujettes aux erreurs des DMM conventionnels ont été remplacées par l’utilisation d’un numériseur haute vitesse disponible sur le marché, de la technologie DSP et de la puissance de l’ordinateur hôte. L’auto-étalonnage offre une précision optimale sur toute la gamme de température de fonctionnement de 0 à 55 ºC avec un cycle d’étalonnage de deux ans. En combinant cela à des éléments de référence intégrés très stables, on obtient le DMM PXI le plus rapide et le plus précis du monde, avec des fonctionnalités et des performances sans compromis comparables et supérieures à celles de la plupart des DMM traditionnels.