From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
Les alimentations CC programmables sont des outils essentiels pour alimenter un matériel connecté. Lors de l’injection, la puissance est générée dans l’alimentation et dissipée dans un matériel sous test (DUT) ; lors de l’absorption, le DUT produit de l’énergie qui se dissipe dans l’alimentation. Lorsque vous choisissez une alimentation programmable, il est important de comprendre certaines fonctionnalités disponibles, telles que le mode de tension constante, le mode de courant constant, la télédétection et l’isolation. Examinons l’importance de ces fonctionnalités et la manière dont vous pouvez les intégrer à votre système de test et de mesure.
Couramment utilisé dans les applications de recherche, de conception, de développement et de production, un bloc d’alimentation CC est un instrument capable de fournir une alimentation CC à un matériel connecté. Un appareil connecté à une alimentation peut être appelé charge, matériel sous test (DUT) ou unité sous test (UUT), selon le contexte. Pour caractériser un DUT ou vérifier s’il fonctionne comme prévu, de nombreuses alimentations CC peuvent simultanément fournir du courant et mesurer la tension ou le courant consommé par celui-ci. En général, les blocs d’alimentation fournissent un courant ou une tension constante et surveillent la chute de tension ou la consommation de courant qui en résulte. Une alimentation CC programmable peut être automatisée en utilisant un ordinateur pour communiquer avec le matériel. Certaines alimentations CC programmables peuvent stocker des séquences de sortie ou des mesures dans la mémoire embarquée, tandis que d’autres ne peuvent gérer que des actions immédiates.
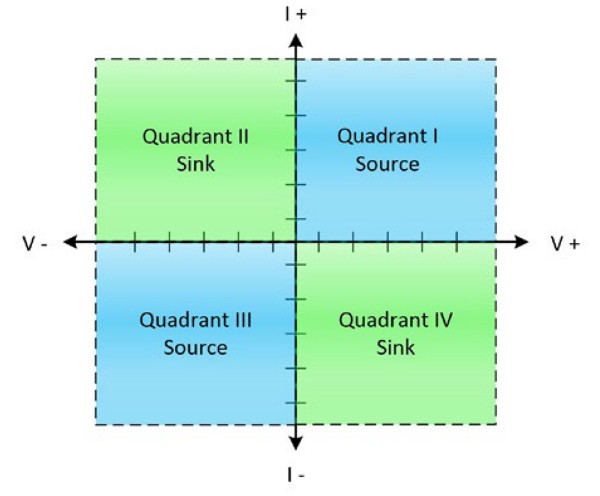
Figure 1. La plupart des alimentations CC fonctionnent dans le quadrant I, fournissant une tension et un courant positifs, ou dans le quadrant III, fournissant une tension et un courant négatifs.
Selon le diagramme I-V de la figure 1, la plupart des alimentations CC fonctionnent dans le quadrant I, fournissant une tension et un courant positifs, ou dans le quadrant III, fournissant une tension et un courant négatifs. Pour calculer la puissance CC, on utilise la formule P = V x I. Dans le quadrant I, la tension et le courant sont positifs ; dans le quadrant III, la tension et le courant sont négatifs. Dans les deux cas, si l’on insère les chiffres dans la formule de puissance, on obtient une puissance de sortie positive, appelée injection. Le fonctionnement dans les quadrants II et IV donne lieu à une puissance de sortie négative, appelée absorption. Lors de l’injection, la puissance est générée dans l’alimentation et se dissipe dans le DUT. Lors de l’absorption, la puissance est générée dans le DUT et se dissipe dans l’alimentation.
Certains matériels appelés unités de source et mesure (SMU) peuvent fonctionner dans les quatre quadrants, en fournissant et en absorbant de la puissance. Vous pouvez considérer une SMU comme une batterie rechargeable idéale. Lorsque vous connectez la batterie au chargeur, la batterie absorbe le courant du chargeur. Lorsque vous déconnectez la batterie du chargeur et l’utilisez pour alimenter une lampe de poche, la batterie devient une source qui alimente l’ampoule. Les SMU sont couramment utilisées pour caractériser les batteries, les cellules solaires, les alimentations, les convertisseurs CC-CC ou d’autres appareils de production d’énergie.
La précision constitue un autre facteur de différenciation entre une alimentation CC et une SMU. Certaines applications sont particulièrement exigeantes et requièrent une précision supérieure à celle d’une alimentation classique. La précision des SMU est souvent élevée, de l’ordre du µV ou du pA. C’est pourquoi on les privilégie souvent lorsque la précision des valeurs « sourcées » et mesurées est importante et que l’application requiert une sensibilité supérieure à celle d’une alimentation classique. Si la précision est essentielle pour votre application, apprenez-en plus dans notre white paper Qualité des échantillons analogiques : exactitude, sensibilité, justesse et bruit.
En plus des différences entre l’injection et l’absorption, il est également important pour vous de comprendre la différence entre le mode de tension constante et le mode de courant constant. Les alimentations CC programmables peuvent fonctionner en mode de tension constante ou en mode de courant constant, selon les niveaux de sortie et les conditions de charge souhaités.
En mode de tension constante, parfois appelé mode tension contrôlée, une alimentation se comporte comme une source de tension, en maintenant la tension constante aux bornes de sortie, alors que le courant de sortie varie en fonction des conditions de charge. Si la résistance de votre charge change, la loi d’Ohm (V = I x R) stipule que le courant fourni doit également changer proportionnellement pour maintenir le niveau de tension de sortie de l’alimentation. Si la résistance d’un DUT chute soudainement, l’alimentation augmente le courant pour maintenir la tension constante.
Lorsque vous utilisez une alimentation CC programmable, vous pouvez définir la limite de courant souhaitée. Si votre charge tente de consommer une quantité de courant supérieure à la limite programmée, l’alimentation commence à fonctionner de manière conforme. L’alimentation est alors incapable d’atteindre le niveau de tension de sortie demandé sans dépasser la limite de courant programmée par l’utilisateur. L’alimentation passe alors en mode de courant constant et le courant est maintenu dans la limite de courant. Ce niveau de résistance de charge essentiel est appelé résistance de conformité, qui peut être calculée en divisant la consigne de tension par la limite de courant. Parmi les autres appellations courantes de la résistance de conformité, citons la résistance critique et la résistance croisée.
Par exemple, supposons que vous souhaitiez fournir une tension constante de 5 V (VS = 5 V) à votre DUT, qui fournit généralement une résistance de charge de 50 Ω (RL = 50 Ω). De plus, vous décidez de limiter la sortie de courant à 300 mA (IS = 0,3 A) pour éviter d’endommager le DUT. En utilisant la formule de résistance de conformité (RC = VS / IS), vous obtenez une résistance de charge minimale de 16,67 Ω pour que la sortie fonctionne en mode de tension constante. Si la résistance de votre charge fluctue, mais reste supérieure à 16,67 Ω, votre alimentation continue de fournir une tension constante de 5 V. Si le DUT tombe en panne et que la résistance de charge tombe en dessous de 16,67 Ω, l’alimentation commence à fonctionner de manière conforme, en passant en mode de courant constant et en fournissant un courant constant de 300 mA à un niveau de tension inférieur à 5 V.
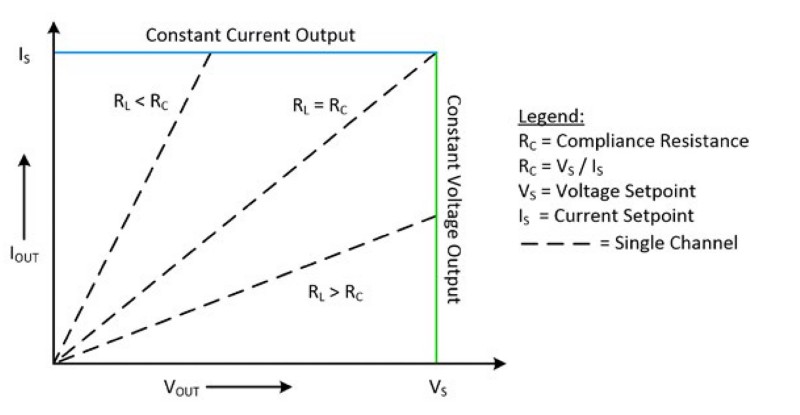
Figure 2. Lors de la sortie d’une tension constante, vous pouvez définir une limite de courant pour protéger le DUT.
Le mode de courant constant est essentiellement le contraire du mode de tension constante. En mode de courant constant, également appelé mode à courant contrôlé, l’alimentation se comporte comme une source de courant, en maintenant constant le courant traversant les bornes de sortie, alors que la tension de sortie varie en fonction des conditions de charge. Selon la loi d’Ohm, si la résistance de votre charge change, la tension doit également changer de manière appropriée pour maintenir un courant constant. Si le DUT de l’exemple précédent tombe en panne et provoque une baisse de la résistance de charge, l’alimentation diminue proportionnellement la tension de sortie pour maintenir le courant constant. Par exemple, le fonctionnement en courant constant est souhaitable pour contrôler les LED qui risquent d’être endommagées par un courant élevé.
Le mode de courant constant est également soumis à une limite de tension configurable, imposant une résistance de conformité similaire au mode de tension constante. Vous pouvez utiliser le même calcul que celui de la section Mode de tension constante pour calculer votre résistance de conformité pour les opérations en courant constant. Cependant, pour le mode de courant constant, la résistance de votre charge doit rester inférieure à la résistance de conformité pour maintenir le courant constant souhaité. La figure 2 illustre le concept de résistance de conformité pour les modes tension constante et courant constant.
Une application unique qui nécessite à la fois une tension et un courant constants est la charge d’une batterie lithium-ion, un type de batterie rechargeable couramment utilisé dans l’électronique portable en raison de sa densité d’énergie, de l’absence d’effet mémoire et de la perte lente de la charge lorsqu’elle n’est pas utilisée. Pour recharger une batterie lithium-ion, le bloc d’alimentation doit appliquer un courant constant, en surveillant le niveau de tension de la batterie jusqu’à ce que celle-ci atteigne sa tension maximale. Une fois la batterie lithium-ion complètement chargée, l’alimentation doit passer en mode de tension constante, fournissant ainsi le courant minimum requis pour maintenir la batterie à sa tension maximale.
La plupart des alimentations CC programmables ont pour caractéristique essentielle de pouvoir mesurer le courant et la tension générés. Cette caractéristique est essentielle pour de nombreuses applications telles que le traçage de courbe I-V, où la consommation de courant doit être mesurée pour plusieurs consignes de tension. L’opération de mesure d’une alimentation CC programmable est similaire aux capacités de mesure d’un multimètre numérique (DMM). Comme pour tout appareil de mesure, il existe un compromis entre la vitesse à laquelle vous effectuez les mesures et le bruit.
Pour effectuer ces mesures, choisissez une alimentation programmable avec une méthode de mesure adaptée à votre environnement. Par exemple, NI propose NI-DCPower, avec des API pour de nombreux langages de programmation courants, ainsi que InstrumentStudio pour des mesures interactives simples et efficaces.
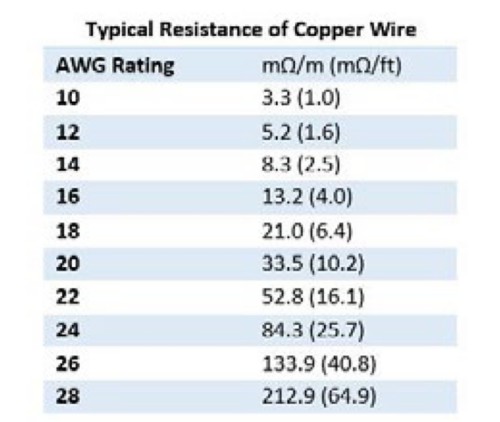
L’effet de la résistance du fil sur la tension perçue par un DUT constitue un défi pour obtenir ou mesurer des tensions précises. La résistance du fil est toujours présente, mais peut devenir problématique lors de l’utilisation de fils très longs et de petit calibre. Le tableau 1 présente les résistances typiques de différents calibres de fils de cuivre. Bien qu’elles ne dépassent généralement pas quelques ohms, ces petites résistances peuvent avoir un impact important sur la tension reçue par un DUT, en particulier lorsque la résistance interne du DUT est faible.
Tableau 1. La résistance du fil peut avoir un impact important sur la tension reçue par un DUT.
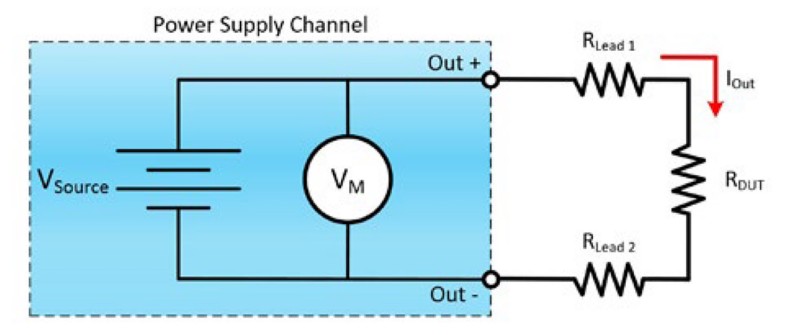
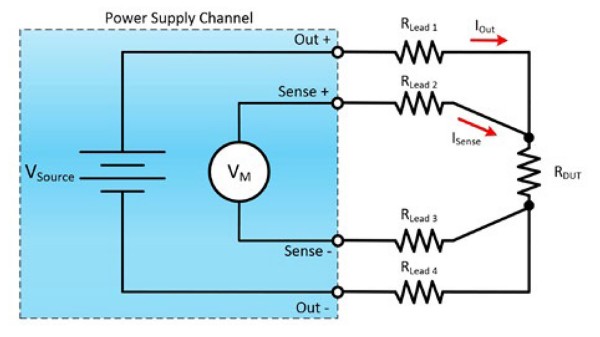
La figure 3 montre le diagramme d’un circuit générique qui comprend un instrument d’alimentation, des fils conducteurs, connectant la source d’alimentation au DUT. Dans ce cas, les conducteurs sont des fils de cuivre 26 AWG de 732 cm (24 pieds) de long, avec une résistance de fil résultante d’environ 1 Ω pour les fils positifs et négatifs qui connectent la source d’alimentation au DUT. Le courant sortant de l’alimentation provoque une chute de tension aux bornes de Rlead1 et Rlead2. La tension aux bornes de RDUT est donc inférieure à Vsource.
Figure 3. Ceci montre un exemple de diagramme de connexion pour une alimentation CC programmable typique qui peut être utilisée pour calculer la tension reçue par un DUT.
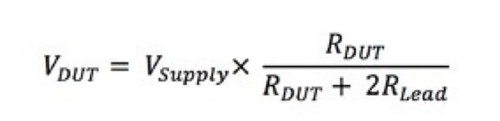
En supposant que la source d’alimentation est définie sur une sortie de 5 V et que le DUT a une impédance de 1 kΩ, vous pouvez calculer la tension réelle observée aux bornes du DUT en utilisant l’équation suivante.
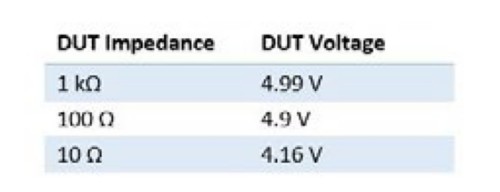
Dans le cas initial, la tension observée n’est en fait que de 4,99 V. Pour certains appareils, ce petit changement n’est pas un problème ; cependant, pour les applications qui nécessitent une caractérisation précise basée sur la tension de fonctionnement, cette erreur peut devenir critique. De plus, pour les appareils à faible impédance d’entrée et qui consomment donc beaucoup de courant, la tension réelle du DUT peut être nettement inférieure à la tension de sortie de l’alimentation. Le tableau 2 énumère les valeurs observées par l’exemple de DUT en fonction des valeurs inférieures de son impédance d’entrée.
Tableau 2. Pour les appareils à faible impédance d’entrée, la tension observée sur le DUT peut être nettement inférieure à la tension de sortie de l’alimentation en raison de la résistance des fils.
La solution à l’erreur de tension induite par la résistance du fil est la télédétection, également connue sous le nom de détection à 4 fils. Cette technique tient compte de la chute de tension sur la résistance du fil en mesurant la tension directement sur le DUT et en la compensant. Cette méthode est similaire à la façon dont les multimètres numériques effectuent des mesures de résistance à 4 fils pour éliminer l’effet de la résistance de fil des mesures de résistance. La plupart des alimentations, des SMU et des DMM disposent de deux bornes supplémentaires sur la sortie pour appliquer cette technique de télédétection à 4 fils. Ces bornes supplémentaires sont connectées directement au DUT, comme le montre la figure 4. Bien qu’il y ait encore une résistance des fils utilisés pour la télédétection, les mesures de tension sont à haute impédance. Ainsi, aucun courant ne traverse les fils de détection et aucune chute de tension n’est observée.
Figure 4. La télédétection est une technique de connexion à 4 fils qui permet d’éliminer les effets de la résistance des fils.
Lorsque vous envisagez de choisir une alimentation CC programmable pour votre application, il est important de prendre en compte l’ondulation et le bruit de sortie, parfois appelés Variations périodiques et erratiques (PARD). Le bruit réel est aléatoire et s’étend sur toutes les fréquences lorsqu’il est observé dans le domaine fréquentiel, alors que l’ondulation est généralement périodique. L’ondulation est introduite par le redressement CA-CC nécessaire pour convertir l’alimentation CA de la prise murale aux niveaux CC souhaités. Selon le type de régulation utilisé par une alimentation, l’ondulation a une ou deux fréquences fondamentales.
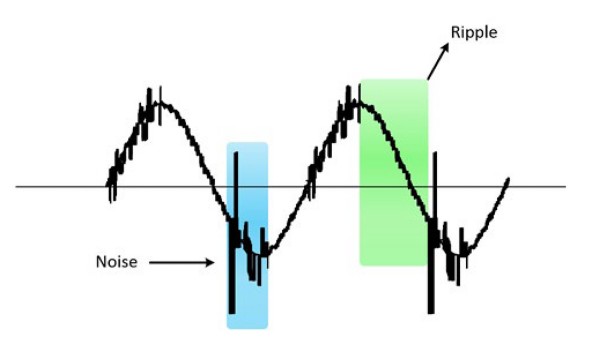
Les alimentations CC utilisent généralement une régulation linéaire ou à découpage pour convertir la source d’alimentation CA 50/60 Hz en un signal d’alimentation CC. Les alimentations à régulation linéaire utilisent un transformateur CA-CC pour convertir la tension de la ligne en une sortie CC stable. Par conséquent, la tension de sortie d’une alimentation à régulation linéaire présente généralement une ondulation basse fréquence de 50/60 Hz, en plus de tout bruit supplémentaire présent. Les alimentations à régulation linéaire présentent généralement des ondulations, un bruit et un rendement faibles. Elles sont également de grande taille et produisent plus de chaleur. D’autre part, les alimentations à découpage convertissent le courant de 50/60 Hz en une fréquence beaucoup plus élevée, ce qui produit une ondulation haute fréquence périodique en plus de l’ondulation basse fréquence de 50/60 Hz. Les alimentations à découpage sont généralement plus compactes et plus efficaces, et produisent moins de chaleur, mais sont très sensibles au bruit haute fréquence. La figure 5 illustre une ondulation haute fréquence et un bruit aléatoire.
Figure 5. Dans les alimentations, le bruit est généralement aléatoire et s’étend sur toutes les fréquences, alors que l’ondulation est périodique.
De plus, les transmissions des alimentations CC programmables peuvent être affectées par le bruit ambiant, en plus du bruit inhérent au système. Pour réduire les effets du bruit ambiant, il est important d’utiliser des fils blindés à paires torsadées lorsque cela est possible.
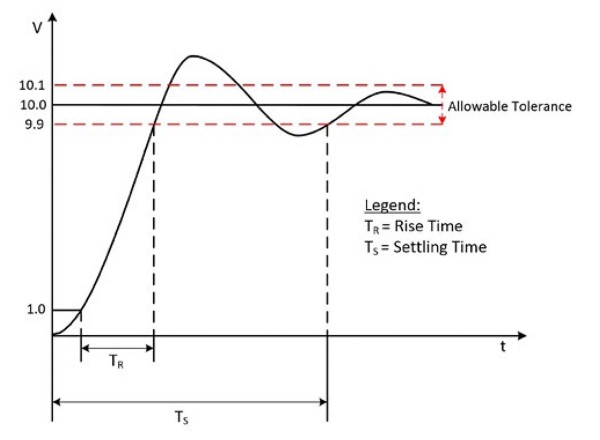
Les temps de montée et d’établissement sont des indicateurs clés de la capacité d’une alimentation à atteindre le niveau de tension souhaité et à se stabiliser. Plus précisément, le temps de montée est la durée nécessaire pour que la sortie passe de 10 % à 90 % de la sortie configurée. Le temps d’établissement est le temps nécessaire pour qu’une voie de sortie se stabilise dans les limites d’un pourcentage spécifié de sa valeur finale, y compris le temps de montée.
La figure 6 illustre les temps de montée et d’établissement pour une sortie d’alimentation passant de 0 V à 10 V.
Figure 6. Les temps de montée et d’établissement sont des indicateurs clés de la capacité d’une alimentation à atteindre le niveau de tension souhaité et à se stabiliser.
Les temps de montée et d’établissement sont des spécifications d’alimentation importantes car ils peuvent affecter directement le temps de mesure, nécessitant plus de temps pour que le circuit se rétablisse après le transitoire avant que vous puissiez effectuer la mesure suivante. Le temps de mesure est particulièrement important dans des situations, telles que les systèmes de test automatisés, où la réduction du temps de mesure peut également réduire votre coût global.
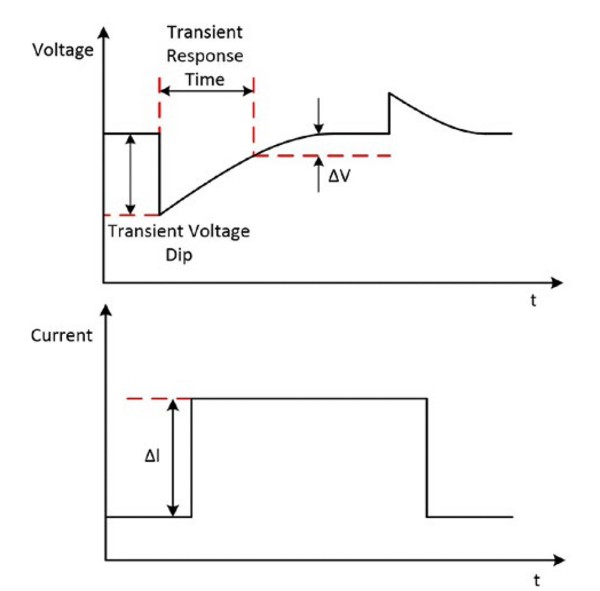
Une réponse transitoire désigne généralement la réponse d’un système à un changement d’équilibre. Pour une alimentation CC, la réponse transitoire décrit comment une alimentation fonctionnant en mode de tension constante réagit à une variation soudaine du courant de charge. Les variations de courant de charge, comme une impulsion de courant, peuvent provoquer des transitoires de tension importants, comme le montre la figure 7. Lorsque le circuit de contrôle interne de l’alimentation compense la variation de courant de charge, la tension se stabilise au niveau souhaité. La réponse transitoire d’une alimentation spécifie le temps nécessaire pour que les transitoires se rétablissent dans les limites d’un pourcentage de tension donné. En général, la réponse transitoire correspond au temps nécessaire pour revenir à un pourcentage de la consigne de tension après une variation de 50 % du courant de charge. Par exemple, un appareil peut être capable de revenir à 0,1 % de la consigne de tension d’origine en 50 µs après une variation de 50 % du courant de charge.
Figure 7. Réponse transitoire à une impulsion de courant
Dans une application, si la résistance de votre DUT chute soudainement et provoque une impulsion de courant, une chute de tension transitoire se produit avant que le circuit de contrôle interne de l’alimentation ne puisse compenser la variation de la charge. Tout comme les temps de montée et d’établissement, les spécifications de la réponse transitoire d’une alimentation sont importantes car elles peuvent affecter le temps de mesure. Pour en savoir plus sur les considérations relatives à la réponse transitoire et à la charge, reportez-vous au white paper Considérations sur la régulation de ligne et de charge des alimentations et sur la configuration en cascade.
L’isolation est un moyen de séparer physiquement et électriquement deux parties d’un appareil de mesure ou d’approvisionnement. L’isolation électrique consiste à éliminer les chemins vers la masse entre deux systèmes électriques. L’isolation électrique permet de supprimer les boucles de masse, d’accroître la gamme de tension de mode commun de l’alimentation, et de décaler la référence à la masse du signal vers une seule masse de système. Les spécifications d’isolation de l’alimentation sont particulièrement importantes si vous envisagez de mettre en cascade les sorties d’un bloc d’alimentation pour étendre les gammes de tension et de courant, ce qui est traité plus en détail dans le white paper Considérations sur la régulation de ligne et de charge des alimentations et sur la configuration en cascade.
La topologie d’isolation la plus efficace est l’isolation voie à voie. Dans cette topologie, chaque voie est isolée de façon individuelle des autres voies et des autres composantes non isolées du système. De plus, chaque voie est dotée de sa propre alimentation électrique isolée.
NI propose des alimentations programmables pour les systèmes montés en baie et PXI Express qui peuvent effectuer toutes les tâches évoquées dans les sections précédentes.
L’alimentation programmable PXI fournit jusqu’à 120 W de puissance dans un seul emplacement PXI, ce qui permet de réduire l’encombrement du rack dans le système de test. Les alimentations entièrement programmables disposent de relais de déconnexion en sortie pour isoler l’instrument du DUT, d’une télédétection pour corriger les pertes dans le câblage du système, ainsi que d’un cadencement et d’une synchronisation intégrés via la plate-forme PXI.
Pour des besoins de puissance de sortie plus élevés, choisissez le matériel d’alimentation programmable de NI, qui fournit une alimentation CC programmable pour montage en baie, soit pleine largeur, soit 1/6 de largeur. Le matériel d’alimentation programmable est un bloc d’alimentation CC à voie unique pour montage en baie. Certains modèles peuvent produire des centaines de watts dans un format compact, ce qui convient parfaitement aux systèmes de test nécessitant plusieurs rails d’alimentation.