From 04:00 PM CDT – 08:00 PM CDT (09:00 PM UTC – 01:00 AM UTC) Tuesday, April 16, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From 04:00 PM CDT – 08:00 PM CDT (09:00 PM UTC – 01:00 AM UTC) Tuesday, April 16, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
Découvrez comment la mise à la masse peut déterminer la façon dont un système de mesure doit être connecté pour augmenter la précision des mesures. Les sujets traités dans les articles incluent les sources de signaux mises à la masse, les sources de signaux flottantes, les mesures différentielles, les mesures asymétriques et la configuration appropriée des signaux et des mesures. Ce tutoriel fait partie de la série Principes fondamentaux des instruments.
Les systèmes de mesure peuvent être capables d’utiliser différentes configurations de mise à la masse car les sources de signaux peuvent elles aussi avoir différentes configurations de mise à la masse. Cette capacité est essentielle pour assurer la mesure la plus précise possible. Cependant, disposer de cette flexibilité pose problème au moment de choisir la configuration de mise à la masse du système de mesure.
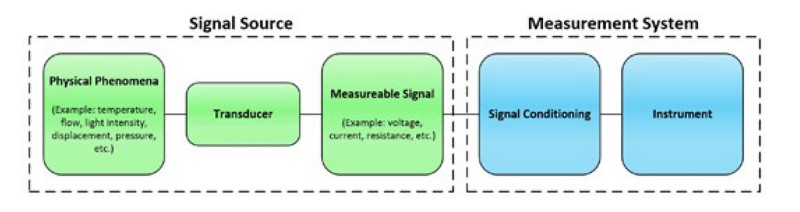
La figure 1 montre un diagramme des composants utilisés pour effectuer une mesure. À droite, le système de mesure est composé d’un instrument et d’un conditionnement de signal. Il convient de noter que le conditionnement de signal peut être intégré à l’instrument ou externe à l’instrument. Sur la gauche, nous avons la source du signal. Cette dernière peut être un transducteur unique qui produit une tension à partir d’un phénomène physique, ou un matériel sous test. Dans cet article, nous parlerons de la mise à la masse de la source du signal, de la mise à la masse du système de mesure, et enfin de la manière de choisir une configuration du système de mesure pour minimiser le bruit et les erreurs de mesure.
Figure 1 : Une source de signal est injectée dans un système de mesure qui comprend un instrument et un conditionnement de signal.
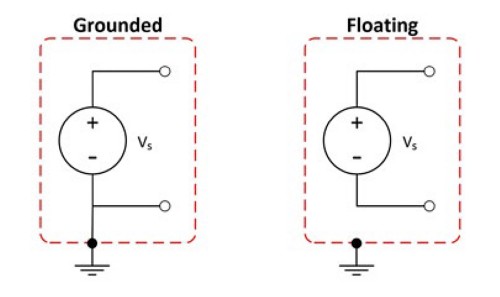
Dans le cadre de cette discussion sur la mise à la masse, il convient de prendre en compte deux catégories principales de sources de signaux. Ces deux catégories sont représentées sous forme schématique dans la figure 2 ci-dessous.
Figure 2 : Il est important de savoir si le signal est mis à la masse ou s’il est flottant.
On peut dire qu’une source de signal est mise à la masse lorsqu’un signal de tension est référencé à la masse d’un système, comme la terre ou la masse d’un bâtiment. Ceci est représenté à la figure 2 ci-dessus par le schéma de gauche. En effet, le signal de tension suit un chemin électrique direct vers la masse du système. Les exemples les plus courants de sources mises à la masse sont les périphériques qui se connectent à la terre d’un bâtiment via des prises murales à trois broches, comme les générateurs de signaux et les blocs d’alimentation. Il est important de savoir que les masses de deux sources de signaux mises à la masse indépendamment n’ont généralement pas le même potentiel. La différence de potentiel de masse entre deux systèmes connectés à la même terre d’un bâtiment peut être de 10 mV, 200 mV ou plus.
Une source de signal non mise à la masse ou flottante est une source dans laquelle le signal de tension n’est pas référencé à la masse d’un système, comme la terre ou la masse d’un bâtiment. Ceci est représenté à la figure 2 par le schéma de droite. On notera que ni la borne positive ni la borne négative n’ont de lien électrique direct avec la masse. Des exemples courants de sources de signaux flottantes sont les batteries, les transformateurs et les thermocouples.
Il est possible de configurer les instruments dans l’un des trois modes suivants : différentiel (DIFF), asymétrique référencé (RSE) ou asymétrique non référencé (NRSE).
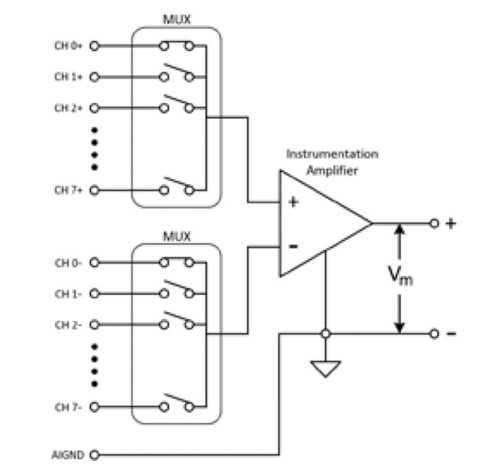
Un instrument différentiel nécessite deux entrées, aucune entrée de l’amplificateur d’instrumentation n’étant référencée à la masse du système. Ceci est illustré à la figure 3, où CH0+ et CH0- sont respectivement reliés aux bornes positives et négatives de l’amplificateur d’instrumentation, mais ne sont pas connectés à la masse du système de mesure (AI GND, ou entrée analogique GND).
Figure 3 : Un système d’acquisition différentiel idéal ne répond qu’à la différence de tension entre ses deux bornes.
Un système d’acquisition différentiel idéal ne répond qu’à la différence de tension entre ses deux bornes : l’entrée positive (+) et l’entrée négative (-). La tension différentielle aux bornes de ces deux fils est le signal désiré. Toutefois, il peut exister un signal indésirable commun aux deux côtés de la paire de fils différentiels. Cette tension est connue sous le nom de tension de mode commun. Un système de mesure différentiel idéal ne mesure pas la tension de mode commun, au contraire, il la rejette complètement afin d’obtenir des mesures plus précises. Cependant, les périphériques pratiques ont des limites décrites par des spécifications telles que la plage de tension de mode commun et le rapport de réjection de mode commun (CMRR).
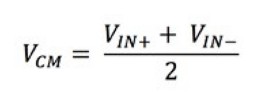
La plage de tension de mode commun correspond à la variation de tension maximale permise sur chaque entrée par rapport à la masse de l’instrument. Le non-respect de cette contrainte entraîne non seulement une erreur de mesure, mais aussi d’éventuels dommages aux composants de l’instrument. Voici la formule pour calculer la tension de mode commun :
Équation 1 : Calcul de la tension de mode commun
Où :
Un exemple de violation de la spécification de la plage de tension de mode commun serait de tenter une mesure différentielle avec un fil à 110 V et un autre à 100 V. Bien que la mesure différentielle soit de 10 V, ce qui peut correspondre aux spécifications du périphérique, la tension de mode commun serait de 105 V. Une telle tension pourrait ne pas correspondre aux spécifications de l’instrument.
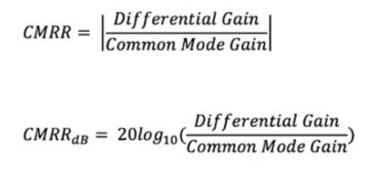
Le CMRR décrit la capacité d’un système de mesure à rejeter les tensions de mode commun. Les amplificateurs qui présentent des CMRR plus élevés rejettent mieux les tensions de mode commun et sont, par conséquent, plus adaptés pour effectuer des mesures précises. Comme le montre l’équation 2, le CMRR peut être décrit comme le rapport du gain différentiel sur le gain de mode commun. Le CMRR peut également être décrit en dB, comme le montre l’équation 3.
Équation 3 : CMRR exprimé en dB
Par exemple, si l’instrument a un CMRR de 100 000:1 (ou 100 dB) et que la tension de mode commun est de 5 V, on peut distinguer des différences de tension supérieures à 50 μV sur les fils différentiels. La réjection de mode commun est critique. En effet, les sources de bruit provenant de l’environnement sont présentes sur les deux lignes de la mesure différentielle. Cependant, si le bruit est présent sur les deux lignes, il est annulé par la mesure différentielle. C’est pourquoi les configurations différentielles conduisent à des mesures plus précises par rapport aux mesures asymétriques. En revanche, les mesures différentielles nécessitent deux fois plus de canaux par rapport aux mesures asymétriques.
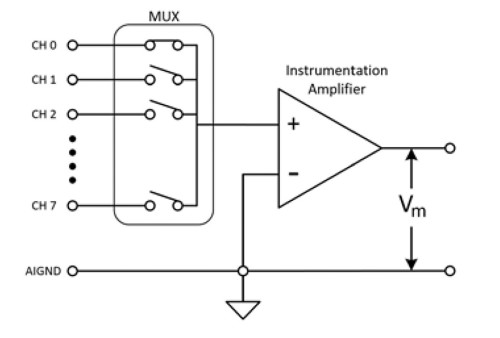
Les configurations asymétriques sont généralement la configuration par défaut des instruments. Elles diffèrent des configurations différentielles, car un seul canal d’entrée analogique est nécessaire pour la mesure. Tous les canaux de l’instrument utilisent l’entrée négative de l’amplificateur d’instrumentation comme référence commune, comme le montre la figure 4. Étant donné que les configurations asymétriques n’utilisent qu’une seule entrée, elles peuvent effectuer deux fois plus de mesures qu’un système à configuration différentielle avec le même nombre de canaux physiques. En contrepartie, les mesures asymétriques sont sensibles aux boucles de masse, ce qui peut diminuer l’exactitude des mesures.
Vous trouverez ci-dessous deux types de systèmes de mesure asymétriques :
Figure 4 : Le canal de référence commun des systèmes GRSE ou RSE est connecté à la masse de l’instrument.
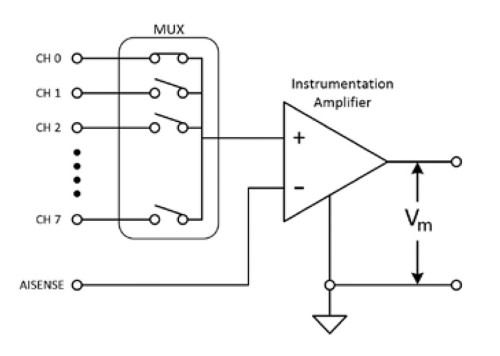
Figure 5 : Le canal de référence commun d’un instrument NRSE est la tension fournie à la borne négative de l’amplificateur d’instrumentation.
Maintenant que nous avons caractérisé à la fois les types de mise à la masse des sources de signaux et les configurations d’instruments, nous allons examiner les combinaisons de sources de signaux et de configurations d’instruments qui peuvent donner les résultats les plus précis.
Pour mesurer une source de signal mise à la masse le plus précisément possible, on utilise une configuration d’instrument différentielle ou NRSE. La raison est qu’aucune masse supplémentaire n’est introduite dans l’ensemble du système. Une masse supplémentaire dans le système peut générer des boucles de masse, sources courantes de bruit dans les applications de mesure.
Elles se produisent lorsque deux bornes connectées dans un circuit présentent des potentiels de masse différents, ce qui se traduit par une circulation du courant entre les deux points. La masse de la source du signal peut se trouver à plusieurs volts au-dessus ou en dessous de la masse de l’instrument. Cette tension supplémentaire peut provoquer une erreur dans la mesure elle-même. De plus, le courant circulant peut induire des tensions sur les fils à proximité, provoquant une erreur de mesure supplémentaire. Ces erreurs peuvent apparaître sous forme de signaux scalaires ou périodiques ajoutés au signal mesuré. Par exemple, si une boucle de masse se forme avec une ligne d’alimentation CA de 60 Hz (la fréquence standard pour les lignes d’alimentation aux États-Unis et dans certains autres pays), ce signal CA de 60 Hz indésirable peut apparaître comme une erreur de tension périodique dans la mesure.
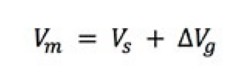
Pour calculer la tension mesurée, V_m, utilisez l’équation 4 ci-dessous :
Équation 4 : Tension mesurée avec boucle de masse présente
Où :
En utilisant l’équation 4 ci-dessus, il est possible de connaître mathématiquement la tension mesurée lorsqu’une boucle de masse est présente. En reprenant l’exemple de la ligne d’alimentation de 60 Hz, ΔV_g est une valeur qui change avec le temps au lieu d’un offset scalaire. Par conséquent, le signal mesuré semble périodique et n’apparaît pas comme une simple erreur d’offset pour la tension mesurée.
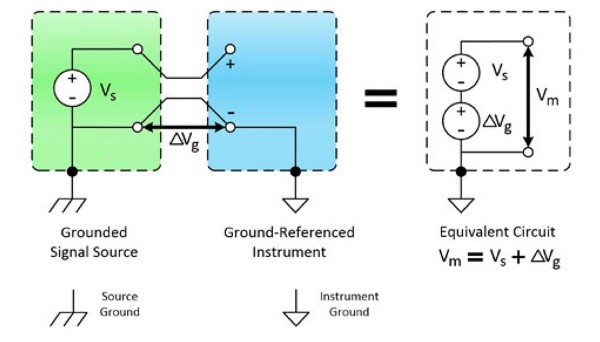
La figure 6 est le schéma d’un système avec une boucle de masse. Sur cette figure 6, si l’on mesure la source de tension V_s avec un instrument utilisant une configuration RSE, on peut simplifier le schéma à gauche de l’équation avec le schéma à droite de l’équation, ce qui correspond aux calculs de l’équation 4.
Figure 6 : Une source de signal mise à la masse mesurée à l’aide d’un système référencé à la masse introduit une boucle de masse ainsi que des erreurs de mesure
Pour éviter les boucles de masse, comme le montre la figure 6, assurez-vous qu’il n’y a bien qu’une seule référence à la masse dans la source du signal ainsi que dans le système de mesure. Pour ce faire, vous pouvez utiliser une configuration d’instrument différentielle ou NRSE, ou du matériel de mesure isolé. Ces procédures sont décrites dans le white paper Types d’isolation et considérations de mesure de la série Instrument Fundamentals.
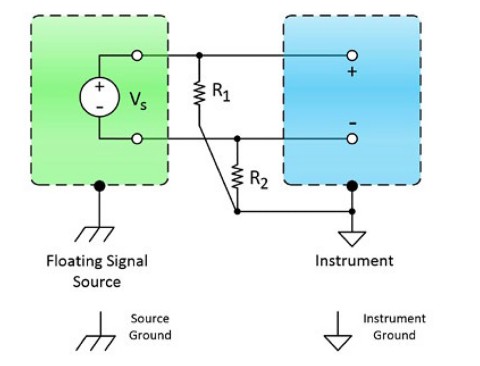
Vous pouvez mesurer des sources de signaux flottantes avec n’importe laquelle des configurations de mesure décrites : différentielle, GRSE/RSE ou NRSE. Veuillez noter que lorsque vous utilisez des configurations de mesure différentielles ou NRSE avec une source flottante, vous devez inclure les résistances de polarisation de chaque fil, positive (+) et négative (-), à la masse de l’instrument (voir figure 7).
Figure 7 : Lors de la mesure d’une source de signal flottante avec une configuration d’instrument différentielle ou NRSE, des résistances de polarisation sont nécessaires.
Les résistances de polarisation fournissent un chemin CC entre les entrées et la masse de l’amplificateur de l’instrument. Ces dernières doivent présenter une résistance suffisamment élevée pour ne pas charger la source du signal et permettre à celle-ci de flotter par rapport à la référence de l’instrument. Toutefois, les résistances de polarisation doivent être suffisamment petites pour maintenir la tension dans la plage spécifiée de l’instrument. C’est pourquoi les résistances de polarisation ont généralement une résistance située entre 10 kΩ et 100 kΩ. Pour vous assurer que vous utilisez une valeur de résistance de polarisation qui se situe dans la plage appropriée, consultez toujours le guide des spécifications de votre périphérique.
Si les résistances de polarisation ne sont pas utilisées dans une configuration différentielle ou NRSE lors de la mesure de sources de signaux flottantes, les signaux mesurés peuvent être instables ou à pleine échelle positive ou négative de l’instrument.
Lorsque l’on utilise une configuration GRSE/RSE pour mesurer une source de signal flottante, les résistances de polarisation ne sont pas nécessaires. Pour obtenir les meilleurs résultats de mesure lors de l’utilisation de configurations d’instruments asymétriques, nous recommandons de vérifier les aspects suivants :
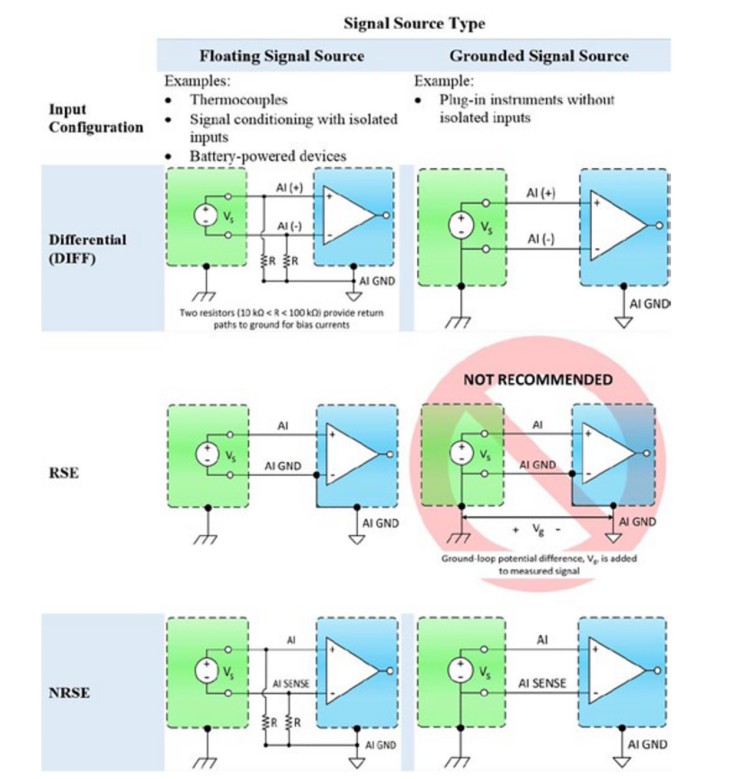
Pour obtenir un résumé des combinaisons recommandées de sources de signaux et de configurations d’instruments, reportez-vous à la figure 8. Mise à la masse et mesures
Figure 8 : Résumé de la configuration de l’instrument par rapport au type de source de signal.