Architectures de systèmes de test hardware-in-the-loop (HIL)
Aperçu
Contenu
- Éléments d'un système de test HIL
- Insertion de défauts matériel
- Test de systèmes comportant plusieurs ECU
- Puissance de traitement supplémentaire – Traitement distribué
- Câblage simplifié – E/S distribuées
- Mise en œuvre de systèmes de test HIL
- Étapes suivantes
Éléments d'un système de test HIL
Un système de test HIL comprend trois composantes principales : un processeur temps réel, des interfaces d'E/S et une interface opérateur. Le processeur temps réel est au cœur du système de test HIL. Il permet une exécution déterministe de la plupart des composants du système de test HIL, comme les communications d'E/S matérielles, l'enregistrement des données, la génération de stimulus et l'exécution du modèle. Un système temps réel est généralement nécessaire pour effectuer une simulation précise des parties du système qui ne sont pas physiquement présentes dans le cadre du test. Les interfaces d'E/S sont des signaux analogiques, numériques et de bus qui interagissent avec l'unité sous test. Vous pouvez les utiliser pour produire des signaux de stimulus, acquérir des données pour l'enregistrement et l'analyse, et fournir les interactions capteur/actionneur entre l'unité de contrôle électronique (ECU) testée et l'environnement virtuel simulé par le modèle. L'interface opérateur communique avec le processeur temps réel pour fournir des commandes de test et permettre la visualisation. Souvent, cette composante fournit également des tâches de gestion de la configuration, d’automatisation des tests, d’analyse et de génération de rapports.
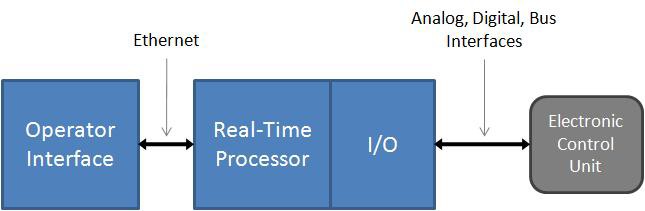
Figure 1. Un système de test HIL comprend trois composantes principales : une interface opérateur, un processeur temps réel et des interfaces d'E/S.
Insertion de défauts matériel
De nombreux systèmes de test HIL utilisent une insertion de défauts matériel pour créer des erreurs dans le signal entre l’ECU et le reste du système, afin de tester, caractériser ou valider le comportement du matériel dans ces conditions. Pour ce faire, vous pouvez ajouter des unités d'insertion de défauts (FIU) entre les interfaces d'E/S et l'ECU pour permettre au système de test HIL de commuter les signaux d'interface entre un fonctionnement normal et des conditions de défaut telles qu'un court-circuit ou un circuit ouvert.
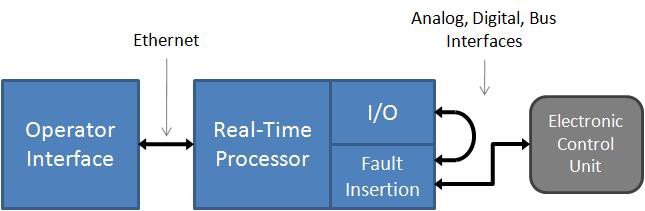
Figure 2. Vous pouvez utiliser l'insertion de défauts matériel pour tester le comportement de l'ECU lors de défauts des signaux.
Test de systèmes comportant plusieurs ECU
Certains systèmes de contrôle/commande embarqués, tels que dans une automobile, un avion ou des éoliennes, utilisent plusieurs ECU qui sont souvent mises en réseau pour fonctionner de manière cohérente. Bien que chacune de ces ECU puisse être testée séparément, le système de test HIL d’un système, comme un simulateur de véhicule complet ou un simulateur iron bird, est souvent utilisé pour des tests virtuels plus complets.
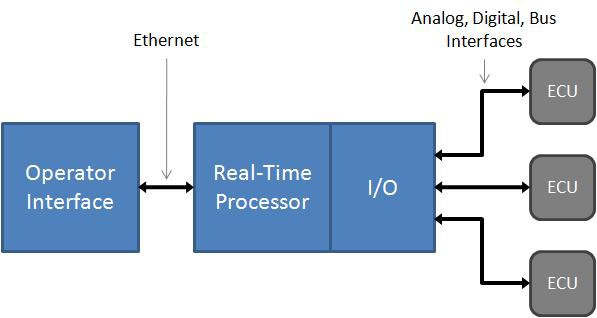
Figure 3. Les automobiles, les avions et les parcs éoliens utilisent plusieurs ECU.
Lors du test d'un système de contrôle/commande de multiples ECU (et même de certains systèmes de contrôle ECU simples), deux nécessités se présentent souvent : une puissance supplémentaire et un câblage simplifié.
Puissance de traitement supplémentaire – Traitement distribué
Même avec la toute dernière puissance de traitement multicœur, certains systèmes requièrent une puissance de traitement supérieure à celle que peut fournir un seul châssis. Pour résoudre ce problème, vous pouvez utiliser des techniques de traitement distribué afin de répondre aux exigences en termes de performances de ces systèmes. Dans les systèmes à très grand nombre de voies, il ne suffit plus d'ajouter simplement une puissance de traitement supplémentaire ; il devient également nécessaire d'ajouter des E/S supplémentaires. Par contre, les systèmes utilisant de grands modèles gourmands en processeur utilisent souvent un châssis supplémentaire, uniquement pour la puissance de traitement supplémentaire, permettant ainsi à ces processeurs de rester dédiés à une tâche unique pour une efficacité accrue. En fonction de la manière dont les tâches du simulateur sont distribuées, il peut s'avérer nécessaire de fournir des signaux de déclenchement et de synchronisation partagés entre les châssis, ainsi que de reproduire des données déterministes pour leur permettre de fonctionner de manière cohérente.
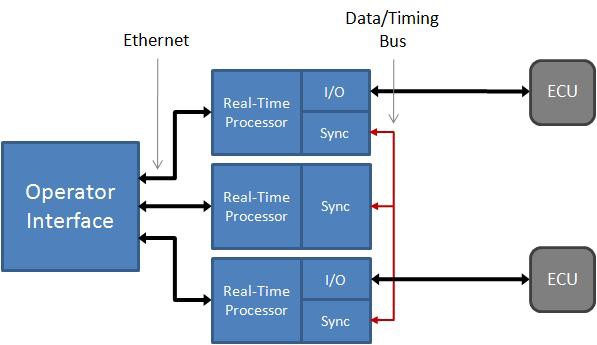
Figure 4. Lorsque vous utilisez plusieurs châssis pour obtenir une puissance de traitement supplémentaire, il est souvent nécessaire de prévoir des interfaces de synchronisation et de cadencement des données entre eux.
Câblage simplifié – E/S distribuées
L'implémentation et la maintenance du câblage pour les systèmes à grand nombre de voies peuvent poser des problèmes coûteux et chronophages. Ces systèmes peuvent nécessiter la connexion de centaines de milliers de signaux entre l'ECU et le système de test HIL, souvent sur plusieurs mètres, pour compenser les besoins en espace.
Heureusement, les technologies d'E/S distribuées déterministes peuvent vous aider à maîtriser ces complexités de câblage et à fournir une connectivité modulaire aux ECU, ce qui permet des modifications efficaces de la configuration des systèmes. Au lieu d'acheminer toutes les connexions vers un seul rack contenant un ou plusieurs châssis pour le traitement temps réel, instrumentés avec des interfaces d'E/S, vous pouvez utiliser des E/S distribuées déterministes pour fournir des interfaces d'E/S modulaires à proximité de chaque ECU, sans sacrifier le déterminisme haute vitesse nécessaire pour une simulation précise des parties virtuelles du système.
Cette approche réduit considérablement le coût et la complexité du câblage des systèmes de test HIL en permettant des connexions locales entre l’ECU et les interfaces d'E/S (couvrant moins d’un mètre), tandis qu’un seul câble de bus est utilisé pour la distance supplémentaire au châssis de traitement temps réel. De plus, la nature modulaire de cette approche, permet aux systèmes de test HIL d'évoluer facilement et graduellement à partir d’un système de test multi-ECU dans lequel toutes les ECU, sauf une, sont simulées sur un système de test complet d'intégration de systèmes HIL dans lequel aucune ECU n'est simulée.
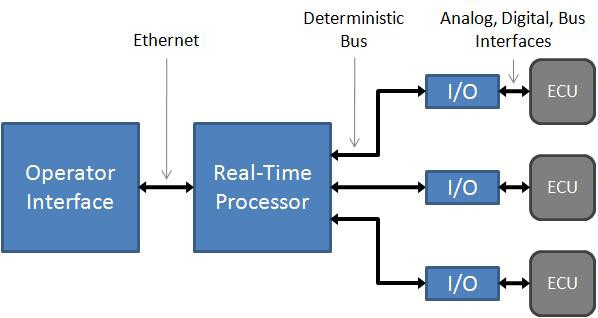
Figure 5. Les interfaces d'E/S distribuées déterministes réduisent considérablement le coût et la complexité du câblage du système de test HIL car les connexions entre l'ECU et les interfaces d'E/S peuvent être réalisées localement.
Mise en œuvre de systèmes de test HIL
Une fois que vous avez sélectionné l’architecture appropriée pour votre système de test HIL, la première étape de la création d’un système de test HIL consiste à sélectionner les composants qui répondent le mieux à vos besoins en développement. National Instruments fournit une grande variété d'options de traitement et d'E/S temps réel pour mettre en œuvre des systèmes de test HIL. Ces systèmes étant tous basés sur des normes industrielles ouvertes, vous êtes assuré(e) qu'ils fournissent toujours les dernières avancées en termes de technologie PC à votre système de test HIL, et qu'ils répondent toujours aux futures exigences des systèmes de test.
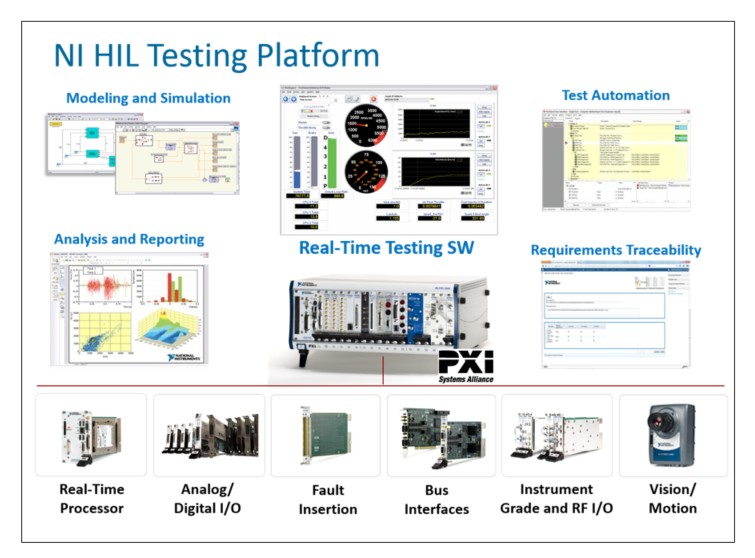
La plate-forme HIL de National Instruments est ouverte et extensible, ce qui signifie qu'elle peut s'adapter à l'évolution des exigences du système. Grâce à son architecture modulaire, la plate-forme NI HIL peut être facilement mise à niveau, avec des fonctionnalités supplémentaires pour tester vos futurs systèmes de test et répondre aux exigences des applications de test de logiciels embarqués les plus contraignantes. Outre la plus large gamme d'E/S sur le marché, National Instruments propose des outils logiciels permettant d'automatiser vos tests HIL, d'effectuer du post-traitement, de générer des rapports et de mapper les résultats des tests en respectant les exigences. Ces outils vous aident à réaliser une gamme de tests plus étendue au cours du processus de développement logiciel, ce qui réduit le coûts du développement tout en améliorant la qualité du produit.
Étapes suivantes
- Lire l’étude de cas : TATA Motors met en œuvre un système de test HIL destiné à la simulation de véhicules hybrides à l’aide des outils NI
- Télécharger notre kit de ressources HIL
- En savoir plus sur les outils HIL de NI pour les transports
- En savoir plus sur les outils HIL de NI pour l’aérospatiale et la défense