From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
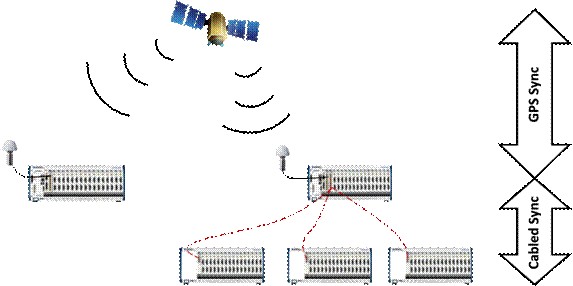
For data acquisition devices to be synchronized, they must sample their data at the same time. One way to accomplish this is to provide the same external sample clock to each device. When PXI chassis are not physically connected by any timing signals, the local sample clocks need to be derived from a global time reference such as GPS. A GPS disciplined clock is continuously adjusted to stay synchronized to the GPS signal so it does not continuously drift as a free running oscillator would. The NI PXI-6683 has the ability to create clock signals which are based on a time reference like GPS. It also can start or stop that clock at a specific time. To ensure that there is minimal skew on the clock signals as they are routed through the PXI chassis, the PXI Star trigger lines are used. The PXI Star lines are specifically designed to have less than 1ns of skew between PXI slots. By using the PXI-6683 to generate a external sample clock disciplined to GPS and routed over the PXI Star trigger lines, data acquisition devices in separate chassis can more tightly synchronized.
While cabling for synchronization is not required for this GPS architecture, there still remains the need to be able to communicate with each of the systems over TCP/IP. If the systems cannot be physically tied into a network communications system, a wireless local area network (WLAN) can be used. Things to consider if using a WLAN are the slower transmission speeds compared to a wired network as well as the range, reliability and even security requirements of your application.
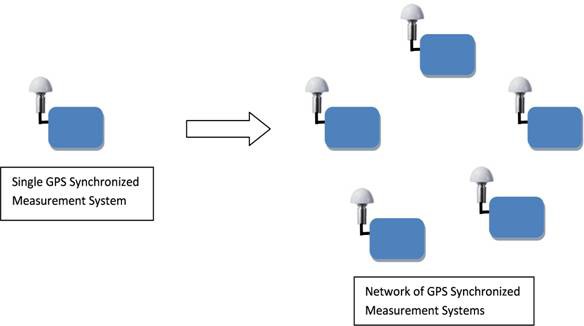
Since no cabling between PXI chassis is required for synchronization, in order to expand a measurement system you only need to duplicate a GPS synchronized node. Figure 2 shows how a system can be expanded.
|
GPS allows a lot of flexibility in the overall system architecture. Each of the nodes does not need to be identical. For example, in many applications the sensors are not equally distributed over the test area. This means that the measurement devices also need to have a similar physical distribution. With GPS synchronization, one node may contain only 16 channels while another has 400 channels. If a specific location requires many channels, multiple PXI chassis can be synchronized together through a cabled solution while the entire node is synchronized to GPS. This is an example of a hybrid cabled and GPS synchronized system. The examples linked below show how to synchronize a single PXI chassis up to many PXI chassis to a single GPS antenna.
|
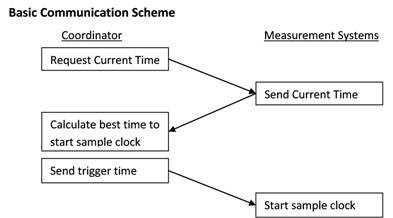
When multiple systems are synchronized together, a coordinator is required to get all of the systems working together. The coordinator is responsible for querying all of the systems for their current times, calculating the best time to start the sample clock and relaying the results back to each system. The coordinator software can reside on any PC which can communicate with all of the measurement systems over TCP/IP. It could even reside on one of the measurement systems.
|
Once the data is acquired, the most common processes are to:
Typically, not just one of these is performed in an application, rather a combination of them. The GPS examples linked below will save all of the data to the local hard drive as well as stream a single channel over TCP/IP to the “Coordinator”. This allows for some basic monitoring of the data as it is being acquired. Once the acquisition is complete, the data files from each measurement system can be combined in a single location for processing or data storage.
The level of synchronization is an important factor to consider when determining which kind of synchronization scheme is required. With a cabled synchronization solution, you can achieve the tightest accuracy possible, but your system is constrained by the length of the cables. With a GPS synchronization scheme, the timing accuracy is reduced due to the error in the GPS signals, but the measurement system can be placed anywhere that a GPS signal can be received.
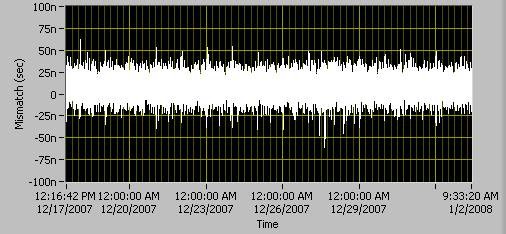
Below are results which show the mismatch between devices each synchronized to GPS. The same signal from a function generator was provided to two NI 6133 devices, each in a different PXI chassis. The time difference between the signals was calculated and plotted on a graph. This process was repeated many times.
Figure 5: Mismatch results using GPS synchronization techniques between two PXI chassis with PXI-6133 devices. These results represent over 15 days of continuous testing.
While a cabled synchronization scheme has no variation in its results due to the fixed nature of the hardware setup, the GPS synchronization results do have variation. This variation is due to the difference between the GPS disciplined sample clocks and you can see how the clocks are continually corrected over time. The disciplining algorithm on the PXI-6683 used to create the sample clock does add jitter to the clock compared to the internal timebase on the DAQ device. This added jitter would show up in the measurement as additional phase noise.