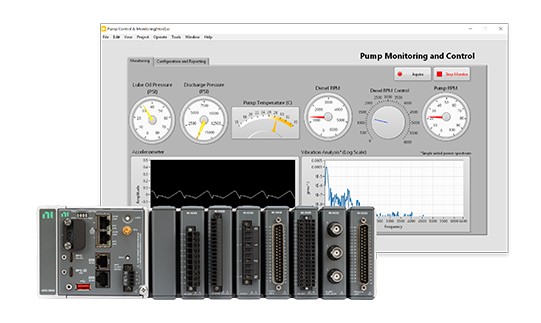


El hardware CompactRIO proporciona una solución de control y monitoreo industrial que utiliza módulos de E/S condicionadas específicos para sensores o protocolos con capacidades en tiempo real.
Mejor para
Necesidades de procesamiento en tiempo real
Aplicaciones de control y monitoreo industrial
Pruebas a largo plazo en campo