Design, System Integration and Testing of Radar Systems
Overview
Design, System Integration and Testing of Radar Systems
Takao Inoue, National Instruments, Austin, TX
October 15, 2013

Figure 1 Passive radar (left) and active radar (right).
This article discusses some of the fundamental research and development challenges in both the digital and RF/millimeter wave domains (such as waveform generation, receiver algorithms and transmit/receive front ends) and addresses current and future directions in design, system integration and test.
Radar applications are becoming more diverse and commercialization is accelerating due to significant advances in digital and RF/microwave technologies. Today, there are numerous radar applications from traditional defense and surveillance1 to automotive radar for driver assistance2 to biomedical radar for imaging, monitoring and treatment.3 For all of these applications, the competitive environment demands rapid cycles of design, system integration, prototyping and testing.
An emerging area of development in cellular communication systems, for example, is focused on the issue of localization for handsets. Due to the FCC’s E911 initiative in 2004, accurate localization techniques for use in emergency calls and mobile applications have been researched extensively. One of the techniques employs time difference of arrival (TDoA) from multiple nearby base stations to obtain accurate location information. Many of the principles used in passive radar systems are applied to this application as well. The challenge is that the localization algorithms must work with RF front ends designed with requirements and capabilities that are very different from radar systems. An LTE standard compliant front end has limited resources for signal processing and variations in operating environment such as indoor and outdoor environments.4
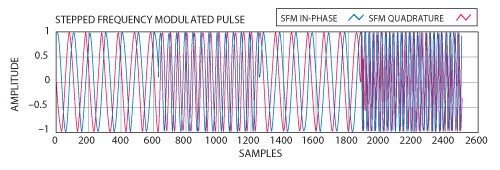
Figure 2 Example SFM waveform where a pulse sweeps through four different frequencies.
Background
Radar is used to detect and/or track target objects and their attributes such as range, speed and other information obtained through signals at RF and microwave frequencies. The broad classes of radar systems are active and passive (see Figure 1). Passive radar systems use non-cooperative source(s) of illumination, such as a target’s emitted signals, broadcast signals or cellular communication signals, to obtain information about the target. Since radar performance relies on the sensing capabilities of the receiver, significant innovations have been made in areas such as phased array antennas, digital beamforming, detection algorithms and source separation algorithms. Active radar uses cooperative sources of illumination by generating its own signal(s) to illuminate the target. Within the class of active radar, there is monostatic radar where the signal source is collocated with the receiver and multistatic radar where there are two or more receiver locations.
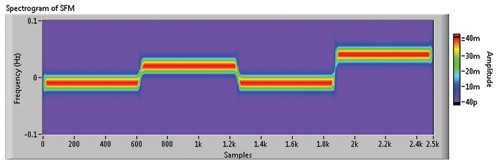
Figure 3 Spectrogram of a SFM waveform showing the instantaneous frequency over time.
Among the class of active radar systems, there are several common signal types. The most basic is continuous wave (CW) radar where a constant frequency sinusoidal signal is transmitted. The CW signal allows the receiver to detect phase/frequency variations (Doppler shift) from the target reflection. Unless a special provision for absolute time marker is used, however, range detection is not possible. A modified CW signal using a stepped frequency modulated (SFM) signal obtains a better range estimate by hopping over multiple discrete frequencies (see Figures 2 and 3). A further modification of the CW signal to linearly ramp up and down a range of frequencies is called linear frequency modulation (LFM) or frequency modulated CW (see Figures 4 and 5). An LFM radar allows detection of Doppler as well as range by observing the frequency difference of the time delayed received signal from the transmitted signal. If a stationary object is detected, a constant beat frequency (transmit to receive frequency difference) is observed.
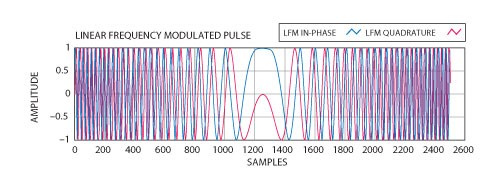
Figure 4 Example LFM waveform where a pulse ramps from high frequency to low and back again.
Pulsed signals of CW, SFM and LFM are also widely used. An extreme example, the ultra-wideband (UWB) pulse signal radar is receiving renewed interest due to its low interference characteristics resulting from low spectral power density. UWB pulse radar is characterized by a pulse width that is typically on the order of a nanosecond or less.
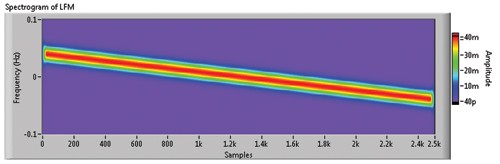
Figure 5 Spectrogram of LFM showing the instantaneous frequency across time.
The magnetron has been one of the popular components for higher power signal generation in applications such as aviation and marine radar. Since the early development of radar magnetron by Henry A. H. Boot, John T. Randall and their associates in late 1939, the resonant cavity tube structure continues to evolve to serve a variety of radar applications to this day. Over the last few decades, however, rapid advancements in solid state devices have had a significant impact on the radar’s capability and system design. Some of the high impact advancements include higher density digital circuits and faster analog-to-digital converters, RF and microwave circuit integration techniques (MMIC and CMOS), and advances in device technologies (GaN, GaAs, SiGe and high electron mobility transistor variations).
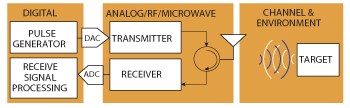
Figure 6 General radar block diagram.
Design, Integration and Testing
Without loss of generality, today’s active radar system design can be broken into two major components: the baseband signal processing and the RF/microwave front end (including the antenna). Figure 6 shows a high level block diagram of an active radar system.
Digital Signal Processing
Thanks to widely available commercial processors, embedded processors, field programmable gate arrays (FPGA), digital signal processors (DSP) and, more recently, graphics processing units (GPU), radar signal processing engineers now have a breadth of platforms to choose from. The choice largely depends on the type of signal processing that is needed and the cost of implementation. General purpose, personal computer, type hardware may be sufficient for radar systems with relatively low throughput and simple signal processing requirements. An FPGA or GPU based processor might be needed if large parallel processing is needed. In this case, however, the cost of the hardware increases substantially. In most platforms, pulse generation and receiver algorithms can be implemented with appropriate software bringing benefits such as programmability and reuse of intellectual property. At the same time, radar signal processing engineers are faced with the challenge of incorporating more and more sophisticated algorithms, consuming longer simulation times within the system and exhausting the available computational resources.
Pulse compression is a technique used to improve range resolution and signal to noise ratio. Range resolution depends on the signal bandwidth:
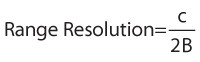
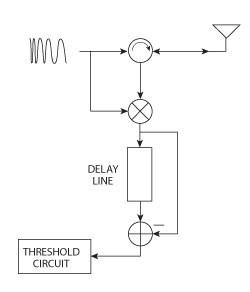
Figure 7 Classical delay line canceller architecture for MTI.
where c is the speed of light and B is the bandwidth. Therefore, better range resolution (or lower range granularity) is obtained when the bandwidth of the signal is high. Unfortunately, the bandwidth of the time-gated sinusoid is inversely related to the pulse duration. Thus a very short pulse is desired for higher range resolution. A very short pulse, however, imposes more stringent radar front end requirements. It is also more difficult to concentrate the energy of a short pulse waveform, limiting the radar’s range. Pulse compression overcomes this problem by computing the cross correlation of the transmit signal and the receive signal. An LFM signal can be expressed as

where rect(x) is a square window function which is 1 for x<1/2 and 0 for x>1/2, T is the pulse width, f0 is the carrier frequency, and a is the LFM slope given by ±B/T (the example in Figures 4 and 5 is a down-chirp with -B/T). The cross correlation of the transmit and receive LFM pulse can be written as
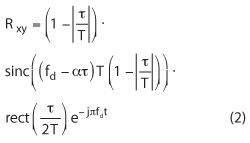
where τ is the time difference of the received signal and fd is the Doppler frequency of the target. The main benefit here is that the mainlobe of Rxy is significantly narrower than the actual pulse width T. In fact, the mainlobe width depends on the bandwidth B and not the pulse duration T. The challenge is in controlling the range sidelobes through windowing and other means to obtain the desired resolution appropriate for the target of interest.
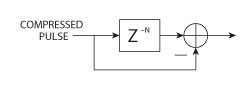
Figure 8 A digital implementation of MTI.
For many radar applications, information about a moving target is needed. Moving target indication (MTI) is often the first processing performed at the receiver to discriminate moving targets from stationary objects (or clutter). The main idea is to remove the constant contribution of the stationary clutter in the received signal. The classical approach is to use a delay line canceller (see Figure 7). Today, the delay line canceller can be implemented digitally by a simple filter with a delay corresponding to the range of the clutter. Digital implementation of MTI is shown in Figure 8 where N is the number of samples in the pulse repetition interval. The benefits are that it is very simple to implement and that the delay element can be either hard coded or adaptive providing greater flexibility.
A moving target detector (MTD) is often used to detect and track the motion of the target. In the mid-1970s, MTD was computed using a parallel bank of filters which led to the widespread use of this technique. Today, this is efficiently realized using fast Fourier transforms (FFT) in modern processing platforms. Suppose that the pulse is repeated at a specified pulse repetition interval (PRI). The principle for MTD calculation is shown in Figure 9. Figure 10 is an example MTD output indicating four moving targets.
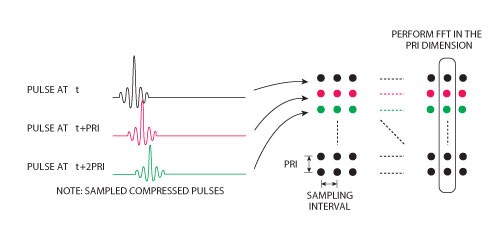
Figure 9 Graphical illustration of MTD operation.
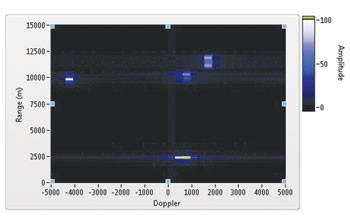
Figure 10 Example output of MTD indicating four moving targets.
While each of the processing blocks have relatively simple functions, it becomes a complex task to integrate these algorithms, partition them onto appropriate platforms, coordinate and communicate with the RF/microwave front end and compensate for its non-idealities. Does it make sense to implement all of the processing in the FPGA at the cost of hardware, development time and less flexibility? Does it make sense to implement all of the processing on the CPU perhaps at the cost of performance? Or does it make sense to partition the algorithms for the CPU and FPGA (and maybe DSP) such that each algorithm is run in some optimal way? If so, what are the throughput, latency and synchronization requirements between these processing units? These are some of the challenges faced by radar signal processing engineers in developing the next generation of radar systems.
RF/Microwave Front End
The transmitter and receiver unit (see Figure 11) plays a key role in acquiring the information for processing. Many radar systems today operate at S-Band (2 to 4 GHz), X-Band (8 to 12 GHz) and higher. Design choices for the transmitter upconverter and receiver downconverter depend on many factors, such as the target frequency range, available local oscillators, interfaces to the DAC and ADC, phase/amplitude control and cost to name a few. Perhaps the most heavily researched areas are high power amplifier (HPA) and low noise amplifier (LNA) design.
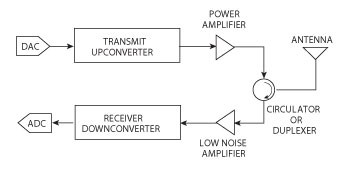
Figure 11 High level block diagram of a radar front end transmit and receive unit.
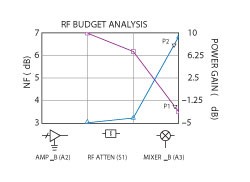
Figure 12 Link budget analysis using AWR's Visual System Simulator.
The HPA performs the critical function of amplifying the illumination signal to the highest power permitted without adding distortion, while having high enough efficiency to maintain power consumption within specified limits. Depending on the application, transmit power levels can range from milliwatts to kilowatts. Linearity of the power amplifier is of great importance since nonlinearity can cause pulse degradation and introduce spurs that violate spectral mask requirements or corrupt the receive signal. In recent years, field plate technology has allowed GaAs HPAs to be operated at higher voltages. Field plate technology and air-bridges increase the breakdown voltages of high electron mobility transistors (HEMT). Increased power density, however, introduces heat dissipation issues. Field plate technology has been used with devices that already support higher voltages and power densities, such as gallium nitride (GaN) on silicon carbide (SiC) substrates. PA designers are faced with a multitude of problems in trading off devices, component count, thermal management and miniaturization, all while satisfying the amplification and spurious emission requirements.
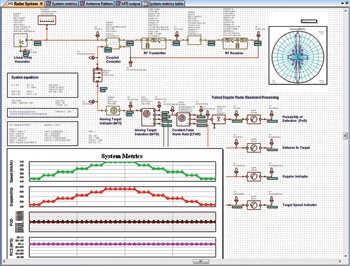
Figure 13 An example of an integrated tool chain by AWR and National Instruments.
While LNA design is relatively mature, its performance is crucial to achieving front end sensitivity and overall radar performance goals. Link budget and noise figure analyses have historically been performed with simple hand calculations or spreadsheets; however, use of a graphical tool like AWR’s Visual System Simulator (VSS), or similar, greatly enhances the designer’s ability to close in on the specification and spot problem areas (see Figure 12).
Integration – Putting It All Together
The radar system architect has an enormous task of understanding various tradeoffs in the digital domain as well as in the RF/microwave domain and putting it all together. Many years ago, radar systems might have been designed and integrated by a small team of hardware engineers, but today’s radar systems are becoming increasingly complex with domain experts from several areas contributing to the development of one system. How can an algorithmic tradeoff be adequately balanced with microwave circuit requirements and cost? There is clearly a greater need for mixed digital-and-RF/microwave design, simulation and a prototype framework so that the corresponding domain experts can communicate with each other to address this complex design problem. One approach is to consider a well-integrated tool chain that supports microwave design, digital signal processing, hardware-in-the-loop (either hardware based processing such as on FPGAs or measurements), and the corresponding hardware capability to support rapid prototyping of designs (see Figure 13). Various systems software packages allow multiple designers to easily create and evaluate subsystem architectures, bringing their designs from concept to simulation and, ultimately, to physical implementation in a single system within a single framework.
Conclusion
Today’s radar systems are as complex as they are diverse. What is common, however, is that they each contain a digital signal processing section and RF/microwave front end. In this article, we looked at a few key elements in both of these areas with examples for pulse compression radar and discussed several technology challenges as well. While radar systems were previously developed by a few hardware engineers, today’s systems often rely on the design contributions of multiple domain experts. Various software tools simplify the complexity of the design process and allow engineers to think across the traditional boundaries.
Learn More
Click here to explore NI's solution to radar, electronic warfare, and signals intelligence
References
- M. Grossi, A. Fiorello and S. Pagliai, “Advances in Radar Systems by SELEX Sistemi Integrati: Today and Towards the Future,” European Radar Conference Proceedings, September-October 2009, pp. 310-317.
- J. Hasch, E. Topak, R. Schnabel, T. Zwick, R. Weigel and C. Waldschmidt, “Millimeter-Wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band,” IEEE Transactions on Microwave Theory and Techniques, Vol. 60, No. 3, March 2012, pp. 845, 860.
- C. Li, J. Cummings, J. Lam, E. Graves and W. Wu, “Radar Remote Monitoring of Vital Signs,” IEEE Microwave Magazine, Vol. 10, No. 1, February 2009, pp. 47-56.
C. Gentner, E. Munoz, M. Khider, E. Staudinger, S. Sand and A. Dammann, “Particle Filter Based Positioning With 3GPP-LTE in Indoor Environments,” IEEE/ION Position Location and Navigation Symposium Proceedings, April 2012, pp. 301, 308