Optimizing NI-RFmx Measurements for Speed
Overview
Contents
- Introduction
- Part I: Measurement Parameters and Instrument Settings Optimizations
- Instrument Settings
- Frequency-Domain Measurement Settings
- Time-Domain Measurement Settings
- RFmx General Settings
- Part II: Multi-measurement Optimization
- Serial Measurements
- Composite Measurements
- Multi-Measurement Parallelism with Named Results
- Measurement Speed Comparison
- Simple Automation with Signal Configurations
- Effect of CPU on Measurement Time
- Instrument Driver FPGA Extensions
- Additional Resources
Introduction
NI-RFmx is a measurement-centric API that provides easy access to measurement speed optimization through:
- Custom measurement parameters and instrument settings
- Composite measurements
- Multi-measurement parallelism with results naming
- Measurement automation with signal naming
- Instrument driver field-programmable array (FPGA) extensions
To further understand how NI-RFmx can be used to optimize your test application, you can review the four fundamental operations that are required to complete any measurement:
- Configure measurement parameters
- Acquire raw data
- Analyze data per configured measurement parameters
- Fetch desired results
From simple serial measurements to advanced parallelism, you can use NI-RFmx to easily build applications for test and measurement. NI-RFmx is optimized for modular instruments; thus, you can achieve the fastest test times with software that is built to exploit multi-core CPU processing and inherent parallelism in the PXI platform. Since the four operations listed above are performed on different modules in the system (e.g. VSA (acquire), host CPU (analyze), etc.), you can easily extract the parallelism inherent in RF measurements. In the first part of this document, the influence of RF measurement parameters and instrument settings on the overall measurement speed will be investigated. In addition, trade-offs, such as measurement speed vs. accuracy will be considered. Recommendations on how to achieve faster measurement speed will be provided. The second part of this document will cover various acquisition and analysis techniques for efficiently performing multiple measurements.
Part I: Measurement Parameters and Instrument Settings Optimizations
Traditionally, electrical signals were analyzed using an oscilloscope to observe voltage or current waveforms in the time domain. However, while time domain information is important, it doesn’t provide the full picture. Observing the signal in frequency domain provides additional insight into the underlying structure of the analyzed signal. Using a spectrum analyzer, the frequency content of the signal can be observed, as depicted in the figure below.
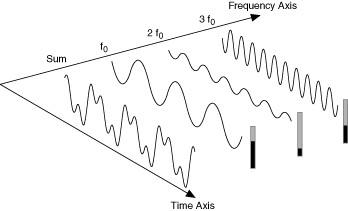
Figure 1: Time and Frequency representation of the signal
There are two main types of spectrum analyzers: swept-tuned and FFT based. In this document, techniques to optimize measurement speed using FFT based spectrum analyzers will be discussed.
To produce the final spectrum measurement, the FFT-based spectrum analyzer takes multiple time domain acquisitions at different RF frequencies (as required), converts these to the frequency domain, and then stitches them together to form the complete spectrum. The time domain signals are converted to the frequency domain using fast Fourier transform (FFT). The FFT can be performed either on the host or on the FPGA of an RF instrument, such as NI PXIe-5646R or NI PXIe-5840 VST.
To understand how to optimize the measurements in the frequency domain, it is important to consider the basic structure of the FFT based spectrum analyzer. The following figure depicts a block diagram of superheterodyne spectrum analyzer. The term superheterodyne has the Greek roots, heteros, meaning “other” and dynamis, meaning “force” [2]. Here, heteros refers to the translation to another frequency, while dynamis refers to the apparent amplification of the detected signal during the heterodyne process. The super part of super-heterodyne refers to super-sonic, meaning that the heterodyne process was extended above the audio frequency range.
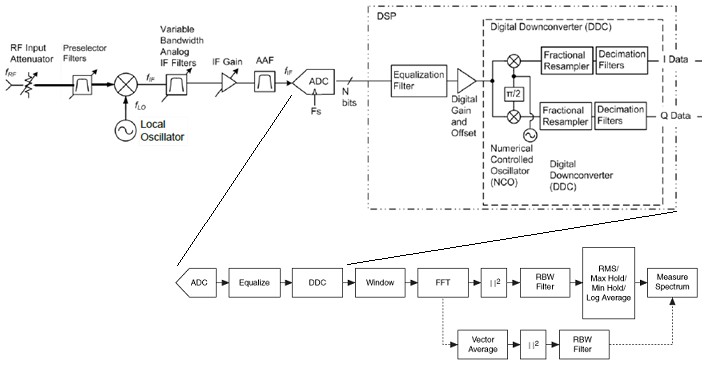
Figure 2: Structure of a superheterodyne spectrum analyzer
In a typical spectrum analyzer, an RF input signal first passes through an attenuator to limit the signal amplitude at the mixer and maximize the dynamic range of the measurement. Then, the signal travels through a pre-selector or a low-pass filter to eliminate any unwanted frequencies. Next, the attenuated and filtered RF input signal gets mixed with a local oscillator (LO) signal. As the LO is mixed in, the RF signal is downconverted to the IF frequency where the shape of the IF filter is traced out in the measured amplitude data.
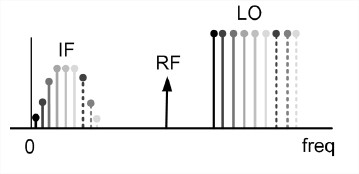
Figure 3: Mixing process
The band-pass IF filter eliminates most of the unwanted signals (distortion products, images, etc.) resulting from the mixing process. After the signal passes through the IF filter stage, the signal goes through an anti-alias filter (AAF) that limits the bandwidth of the input signal before it enters the analog-to-digital converter (ADC). Next, the signal is converted from analog to the digital domain by an ADC. Once the signal is digitized, DSP is performed to provide improved dynamic range, faster sweep speed and better accuracy.
To take full advantage of the hardware specification of your vector signal analyzer and maximize the hardware performance, it is important to choose RF measurement settings that are aligned with the end-goal of your application. Sometimes the most accurate measurement is not the fastest one; it is important to understand which RF measurement settings control these trade-offs between accuracy and speed. NI-RFmx exposes RF measurement settings to achieve fast RF measurement times with capable accuracy. To further understand how the measurement process can be optimized, consider the measurement states that a VSA goes through while controlled by the NI-RFmx driver.
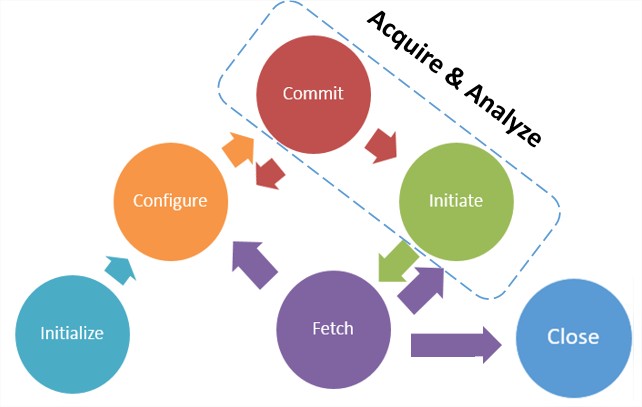
Figure 4: RFmx State Diagram (typical state transitions are displayed)
The hardware is first initialized and then transitions into the configuration state. After the hardware settings are changed in the Configuration State, and Commit is called to apply those settings to the hardware, an internal timer is triggered to consider the settling time needed for the settings to take effect. The total settling time will be dependent on what settings have been changed.
When the Initiate is called after Commit, it will consider the amount of settling time that has already elapsed and will wait for the remaining settling time, allowing the hardware settings to settle before starting the acquisition.
Different VSAs will have different settling times for different instrument settings (LO settling, frequency change, etc). For more information on the settling time of the instrument, please refer to its hardware specifications.
Instrument Settings
While configuring RF measurements, one area that takes noticeable time is applying the settings to the hardware. This is similar to disk write operations on the OS. No matter how fast your system is, every time an exchange of data with hardware is involved it takes considerable time. In some cases, committing a particular setting to the hardware can even take longer than the actual acquisition. The total measurement time (Configure + Commit + Initiate + Fetch) will be affected by the time it takes for instrument settings to settle. To minimize the instrument configuration time, RFmx implements a local cache of all the instrument settings. In addition, all the measurement settings are also cached to help minimize the re-configuration time between measurements. For example, if a TxP measurement is followed by an ACP measurement with a different bandwidth and reference level but at the same frequency, RFmx will only update the reference level and bandwidth settings on the hardware. Since the frequency has not been changed between measurements, RFmx does not re-apply the frequency setting to the hardware, thus reducing the configuration time by limiting interaction with the hardware to only when it is needed.
In addition, if your test system performs the same measurement at multiple frequencies and/or power levels repeatedly, NI-RFmx optimizes this though a property called “Limited Configuration Change” to help achieve faster measurements.
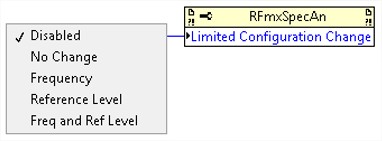
Figure 5: NI-RFmx “Limited Configuration Change" property
When the “Limited Configuration Change” property is enabled for the NI-RFmx driver (SpecAn, LTE, etc.), NI-RFmx will use an optimized code path and reuse the acquisition settings (cached on the first commit), ignoring changes to all attributes except for Frequency, Reference Level and External Attenuation. NI-RFmx will typically run checks on configurations to verify if any parameters have changed in case of driver modifications; enabling “Limited Configuration Change” will skip these checks and only modify the selected properties. This feature may also be leveraged to lock instrument settings to a signal, causing RFmx to ignore changes to RFmxInstr and personality properties in subsequent Initiate and Commit calls.
NI recommends using this feature with named signal configurations, allowing RFmx to precompute acquisition settings for the measurement configurations and re-use settings on successive Initiate calls on the measurement. Note that you do not need to use this property if you create named signals for all the measurement configurations in your test program during test sequence initialization. Also, do not change any RFInstr or personality properties while testing each device under test; NI-RFmx automatically optimizes that use case by caching the named signals settings internally.
Refer to Advanced:Limited Configuration Change Property for more details.
RFmxInstr Advanced: Tuning Speed Property
Tuning speed property allows you to make trade-offs between the LO tuning speed and phase noise. For faster measurement time, set the “tuning speed” property to Fast.
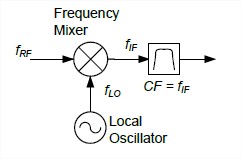
Figure 6: LO tuning
The benefits of tuning speed will be most noticeable for multi-span acquisitions where the LO is retuned for multiple sub-spans. For a single-span acquisition (when the span of the acquisition is less than or equal to the instantaneous bandwidth of the analyzer and the center frequency remains fixed), setting the tuning speed to “Fast” will not have any improvement on the measurement speed since there is no need to retune the LO. However, if you are performing multiple single-span measurements in a sequence at different frequencies then the fast tuning speed will improve the measurement time.
Why does setting “Tuning Speed” to “Fast” speed up measurements with “Cleaner Spectrum” enabled?
When “Cleaner Spectrum” is enabled for a measurement, the FFT Width of the analyzer is set to take narrower bandwidth acquisitions and avoid spurs inherent to RF mixing process. As a result, if the span of the acquisition is greater than 24.9MHz (5665) or 100MHz (5668R), multiple spans will be acquired for the measurement. Since the LO would need to be re-tuned to cover the multiple spans, a faster tuning speed will help to decrease the total measurement time.
What’s the tuning speed of my VSA device?
Refer to the Frequency Tuning Time specification for your device. Typically, Frequency Tuning Time consists of Lock Time + Settling Time to Required Accuracy. For example, for NI 5653, in Fast Configuration mode, a 50 MHz step requires 1.1 ms (the frequency lock time) + 0.75 (the frequency settling time), or 1.85 ms to lock and settle to 0.1 ppm accuracy.
Advanced: IF Filter Bandwidth
IF filter bandwidth is an important characteristic of an RF instrument and it can have significant effect on measurement speed. Not all VSA HW support setting the IF filter bandwidth property. Only super heterodyne VSA supports setting this property. NI-RFmx SpecAn automatically selects the best IF filter for the selected measurements. However, for custom measurements, IF filter bandwidth can be manually set. In some applications, wide IF filter bandwidth is highly desirable. For example, when conducting a modulation quality measurement, such as error vector magnitude (EVM), the signal analyzer needs to capture the entire modulation bandwidth to demodulate the signal. In other applications, a small IF filter bandwidth is needed. For example, when conducting an adjacent channel power measurement (ACP), which measures the level of undesired signals around the main signal channel, it is important to minimize the noise contribution coming from the instrument and cut off the power from the main signal channel. A narrowband IF filter allows the signal analyzer to maximize the IF gain to better utilize the full dynamic range of the ADC with a finite SNR. Typically, there are a few IF filter options for super-heterodyne VSAs. For example, NI PXIe-5665 has three different IF filter bandwidths that can be selected: 300kHz, 5MHz and 50MHz (IF throughpath). When it comes to increasing the measurement speed, a wide IF filter should be used. Wider IF bandwidths translate to fewer individual spectrum acquisitions and faster measurement speeds. By contrast, narrow IF bandwidth configurations require more spectrum acquisitions for a given span and lead to longer measurement times. Although the drawback of a narrow IF bandwidth is longer measurement times, using a narrow IF bandwidth can significantly improve the instrument’s performance in some applications as discussed earlier [6].
Advanced: Cleaner Spectrum Property
The Cleaner Spectrum Property makes a tradeoff between obtaining the lowest noise floor or faster measurement speed. If this property is enabled, the noise floor will be cleaner at the expense of measurement time being increased. The impact on the measurement speed will depend on the hardware that is being used for the RF measurement. The following table provides the summary of trade-offs being made to obtain a cleaner spectrum:
| Hardware: | |
| NI 5665 | Sets the FFT Width property to take narrower bandwidth (24.9MHz) acquisitions and avoid digitizer spurs. Uses IF filters (5MHz, 300kHz) to reduce the noise floor for frequencies below 80MHz. Effect on measurement speed: |
| NI 5644R/5645R/5646R, NI 5840 | Sets a narrower acquisition bandwidth on the device to avoid spurs. Effect on measurement speed: |
| NI 5668R | To provide the best spectrum measurement, the acquisition is reduced to 100 MHz segments for any center frequency. Effect on measurement speed: |
| Other devices | This property is ignored. |
Table 1: Cleaner Spectrum settings per RF device
For faster measurement, set the “cleaner spectrum” property to Disabled.
Frequency-Domain Measurement Settings
Span (Hz)
Span is directly proportional to the measurement time; the measurement takes longer to acquire for larger spans. Consider only acquiring the span needed for your measurement. Keep in mind that when the RBW filter is enabled, the actual acquisition span for your measurement will be slightly larger than the specified span. The RBW filter is enabled by default.
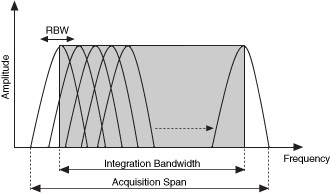
Figure 7: Acquisition Span
Once you set the span for your measurement, NI-RFmx SpecAn will automatically select the IF Filter Bandwidth and FFT width (effective bandwidth) that is appropriate for the specified span. For some of the span values, FFT width would not necessarily be equal to the specified span. This is the case when “Cleaner Spectrum” property is enabled and the span is greater than 24.9MHz (5665). Refer to Table 1.
Refer to Spectral Measurements for more details.
For some measurements, such as adjacent channel power (ACP), the total span of the measurement is controlled by integration bandwidth of the main channel as well as the number of adjacent (offset) channels. To reduce the overall span of the measurement and increase the measurement speed, consider reducing the number of measured offset channels within the constraints of the measurement requirements.
RBW Filter Width (Hz)
A traditional swept spectrum analyzer reports the spectrum as seen through an RBW filter with filter characteristics that affect the power measurement. For FFT-based instruments, this behavior is achieved by emulating the RBW filter digitally.
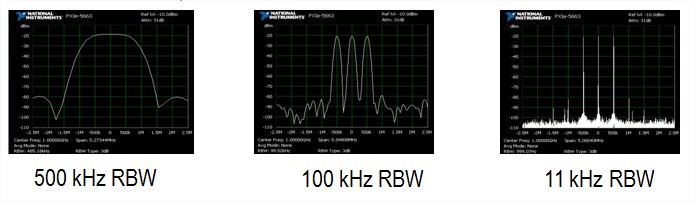
Figure 8: RBW Filter comparison
As the RBW is lowered, the resolution in the frequency domain becomes finer, allowing the individual frequency domain peaks to become visible. A narrow RBW lowers the displayed average noise floor (DANL) of the analyzer, thereby improving the sensitivity of the instrument. Moreover, a narrow RBW also increases the dynamic range of the spectrum analyzer. However, this is only applicable for narrowband signals, such as sine waves, with bandwidths that fit entirely within a frequency bin. Modulated signals with signal power that spans several frequency bins will have their peak powers reduced by the same amount as the noise floor, leaving the final dynamic range the same.
The trade-off of using a narrow RBW is that it requires a longer acquisition time, meaning more samples, longer transfer time, longer computation time, and overall slower measurement speed. In addition, since the type of the RBW filter affects the total span required for the measurement, certain RBW filter types will lead to higher measurement times than others. The following table summarizes the RBW filter type options available in RFmx SpecAn:
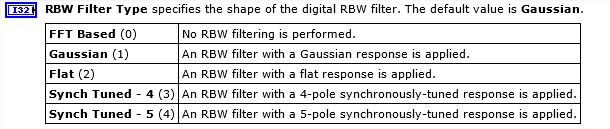
Figure 9: RBW filter types
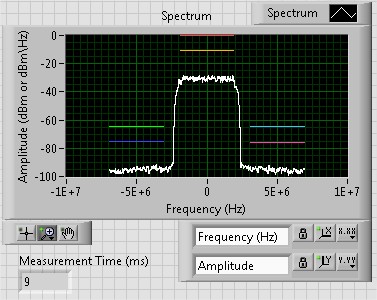
Unless required by a particular standard, consider increasing the RBW to further improve the measurement speed. Furthermore, for faster spectral measurements set the RBW Filter type to “FFT Based”, which effectively turns off RBW filtering. Based on the spectrum configuration, setting the filter type to “FFT based” can give up to 10x+ speed improvement compared to other filter types. For faster time domain measurements, set RBW filter to FFT Based.
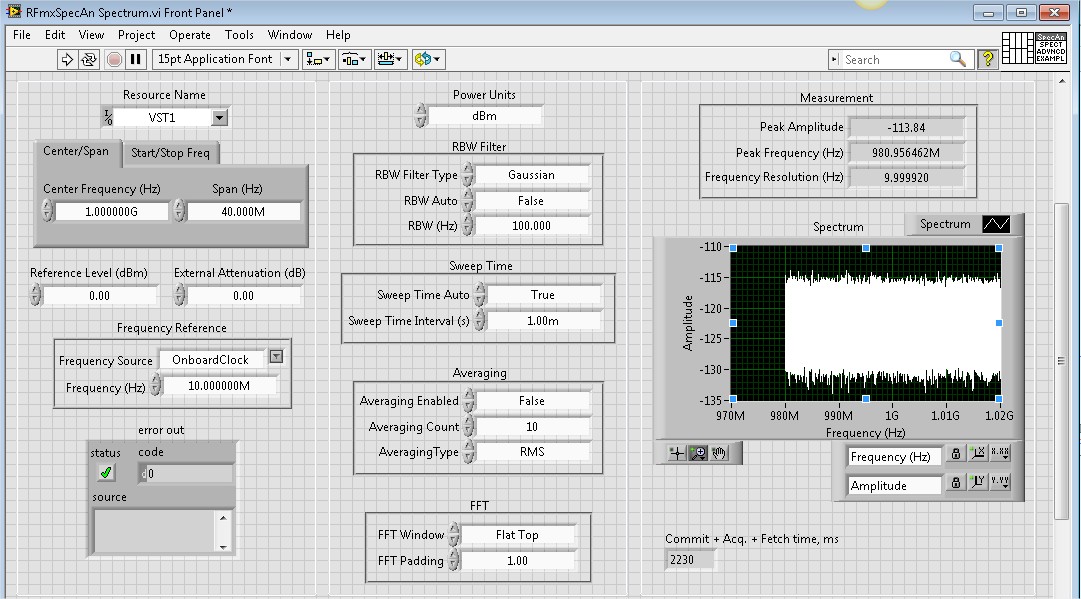
Figure 10: Gaussian –2230ms
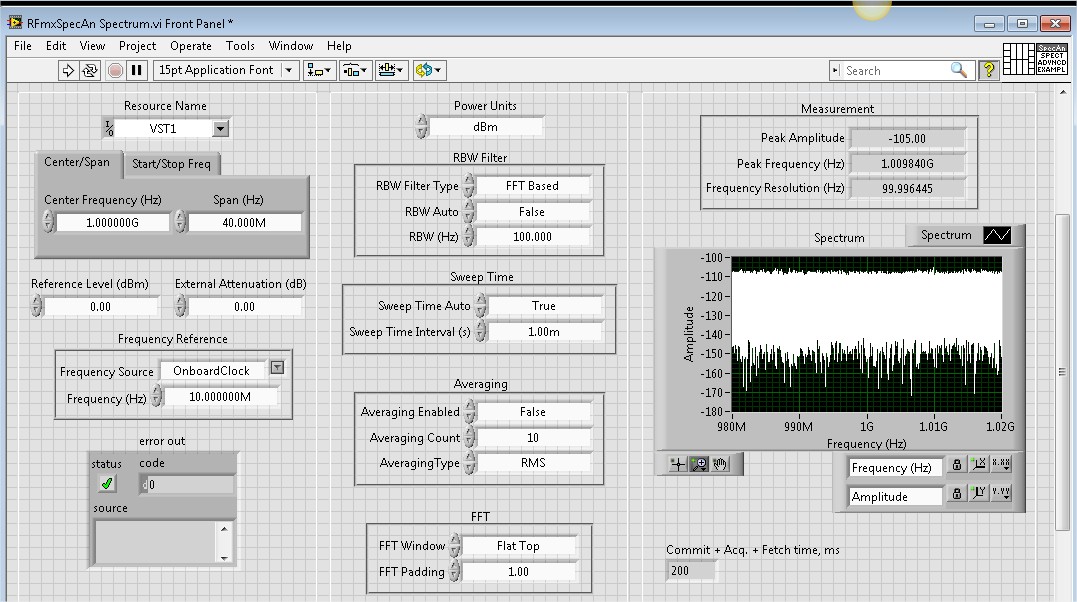
Figure 11: FFT Based –200ms
White paper: Resolution Bandwidth (RBW)
Sweep Time
RFmx acquires and digitally processes signals using a windowed FFT followed by digital RBW filtering to obtain the spectrum.
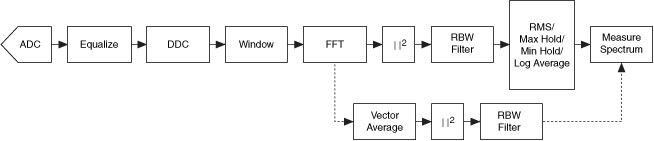
Figure 12: Digital processing of acquired signal
In this approach, sweep time determines the signal acquisition time and is inversely proportional to RBW as shown below.
Since the sweep time effectively controls the acquisition time for the measurement, for faster measurement speed consider reducing the sweep time to the minimum value as required by the measurement. For example, when conducting a channel power measurement, CHP on 10ms LTE FDD frame, consider setting the sweep time to 1ms which corresponds to the duration of one LTE sub-frame. Also, to increase repeatability of the results, use a digital trigger synchronized with the start of the LTE frame to always make sure the measurement is done on the same part of the signal. The sweep time also applies when performing adjacent channel power measurements, ACP. If Sweep time is set to “Auto”, the measurement sets the sweep time to the following value (in seconds):
- 1/RBW; when the RBW filter is FFT based
- 10/RBW; for other RBW filter types
Typically, to improve repeatability of ACP measurements, longer sweep times are needed. However, longer sweep times also lead to longer measurement times. To achieve measurement repeatability without sacrificing measurement time, the sweep time can be kept short and a digital trigger can be used to ensure that the same portion of the incoming RF signal is used each time for the measurement.
(a) (b)
Figure 13: WCDMA ACP measurement (a) Sweep Time=1ms (b) Sweep Time=2ms
ACP: Measurement Method Property
ACP measurement supports three measurement methods based on the requirement of measurement speed, measurement accuracy, and dynamic range.
When you set the measurement method to Normal, the measurement acquires the signal using a wideband front-end filter. This allows the measurement to acquire the spectrum with a large span and perform FFT based processing. In this case, the measurement speed is decreased at the expense of dynamic range.
The following steps help in improving the dynamic range of the measurement:
- The RF input attenuation must be set such that the mixer operates at optimal operating level. Refer to the dynamic range chart of the device for the optimum mixer level.
Mixer Level = Reference Level - RF Attenuation - The reference level must be adjusted to the power level of the test signal. This sets the signal at the A/D converter (ADC) to full scale, which results in the best SNR and SFDR performance.
- Narrowband IF filters can be used to attenuate any potentially large, out of band signals that can overdrive the ADC.
- Re-ranging IF Power Offset when measuring the amplitude of offset channels allows the best dynamic range (Refer to ACP:Advanced:IF Output Power Offset Auto Property).
When you set the measurement method to Dynamic Range, the measurement uses the hardware capability, such as the IF filter and IF gain, to address steps 3 and 4. The measurement acquires the signal using narrowband IF filters available on the analyzer. Analog IF filters used for each offset channel may vary based on the device in use. Narrow bandwidth IF filters are used to acquire a spectrum closer to the carrier channel to filter out the high power seen from the carrier in the adjacent channels. Wideband IF filter is used to acquire a spectrum farther from the carrier to reduce the measurement time. The carrier channels are not filtered.
The measurement computes an IF output power level offset for the offset channels to improve the dynamic range of the ACP measurement.
Note: Using narrowband IF filters restrict the span per acquisition, and increases the time taken to sweep and acquire the total span required by the measurement. This method restricts the RBW based on the narrowband filter used by the measurement. The following table lists the analyzers and the filters used by the ACP measurement in Dynamic Range mode.
Supported Analyzer | IF Filters | Max RBW |
| NI 5665 (3.6 GHz) | 300 kHz | 300 kHz |
NI 5665 (14 GHz) | 300 kHz, 5 MHz | 300 kHz |
NI 5668R | 300 kHz, 5 MHz | 300 kHz |
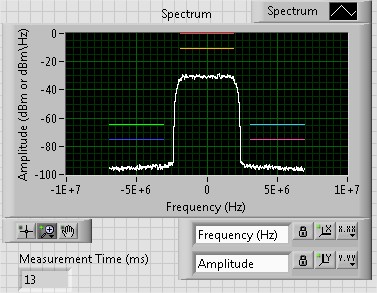
The third measurement method, Sequential FFT, optimizes the measurement times and trades off the test speed and repeatability for accuracy. The measurement acquires I/Q samples and divides them into smaller, equal parts. The FFT of these divisions are calculated and then averaged, giving the spectrum which is used to compute the ACP. This measurement method uses many smaller FFTs, which can be processed faster than a large FFT. However, the calculated spectrum loses resolution due to the larger bins in the small FFTs and results in a loss of accuracy. The Sequential FFT method is meant for use cases where measurement speed is the highest priority. Note that FFT size remains a configurable property, so it is recommended to use a larger FFT for wider bandwidth signals, as in the case of signal bandwidths exceeding 20 MHz.
Test | Measurement | Sweep Time (ms) | RFmx 2.3 Normal (ms) | RFmx 2.3 Seq FFT (ms) | RFmx 2.3 Normal vs. Seq FFT |
Frequency Sweep of ACP with Limited Configuration Enabled | WCDMA | 0.1 | 3.16 | 2.93 | -0.228 (7.22%) |
WCDMA | 1 | 4.96 | 4.01 | -0.95 (19.16%) | |
LTE 10 MHz | 1 | 4.82 | 3.77 | -1.049 (21.77%) | |
LTE 20 MHz | 1 | 6.73 | 4.89 | -1.845 (27.4%) |
Table 2: ACP measurement times for Normal and Sequential FFT methods
Because of the difference in spectrum computation methodology, the Sequential FFT method has the following limitations on supported properties.
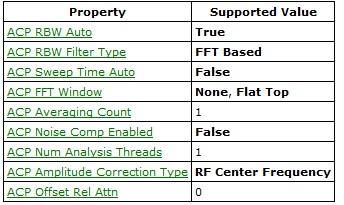
Figure 14: Supported property values for Sequential FFT mode ACP
ACP: Noise Compensation
Noise compensation enables the measurement of the inherent noise floor for a signal analyzer’s given RF path and uses this result to compensate the signal measurement. For a given set of measurement configurations and the state of the signal analyzer, the noise floors are constant. Thus, the noise floor results are cached so that the measurement can use them later; this saves time on redundant noise floor calculations that add to measurement times. When the signal analyzer or measurement parameters change, the noise floor measurement is re-initiated to return valid measurements.
For faster measurements, disable ACP Noise Compensation on the 5665 and 5668R.
Time-Domain Measurement Settings
Modulation Accuracy
Number of Symbols (RFmx Demod)
The “RFmx Demod Configure Number of Symbols” VI configures the number of symbols to be measured. Since the number of symbols controls how many constellation symbols are acquired for the measurement (e.g. EVM), the higher the number of symbols the longer the measurement takes. For faster measurement speed, consider lowering the number of symbols.
For example, when demodulating a 16-QAM signal at 100kHz symbol rate with the Number of Symbols set to 100, the measurement takes 9ms.* However, if the Number of Symbols is increased to 1000, the measurement takes 22ms*, and when increased to 10000 the measurement time increases to 153ms*.
* Measurements conducted using NI RFmx SpecAn 1.2 and PIXe-5645R VST on PXIe-8135 controller.
Synchronization Mode (RFmx LTE)
In RFmx LTE, the synchronization mode controls whether the modulation accuracy measurement, ModAcc, is synchronized to the start of the LTE frame or a slot boundary. The ModAcc measurement is performed over the Measurement Length (slots) property, starting at the Measurement Offset (slots) property from that boundary. The frame synchronization mode allows you to measure specific slots in a frame, while the slot mode starts the measurement at the first complete slot in the acquisition. Consequently, the number of slots measured will be proportional to the total measurement time. Consider using a single slot for fastest measurement speed. The following figures illustrate the difference between the two synchronization modes. In both cases, two LTE slots are measured.
Figure 15: Slot Mode
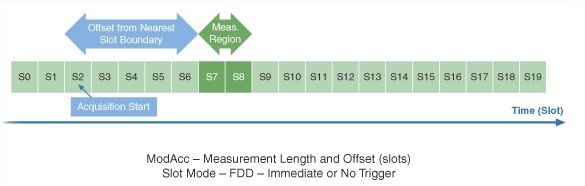
Figure 16: Frame Mode
The marker synchronization mode is a unique mode that enables you to obtain the fastest modulation accuracy measurements. In the marker mode, you must provide an external digital trigger at the start of the frame and use this trigger when configuring ModAcc measurement. The measurement internally uses the fact that the acquisition is triggered at the start of the frame and optimizes some processing to offer a faster measurement time.
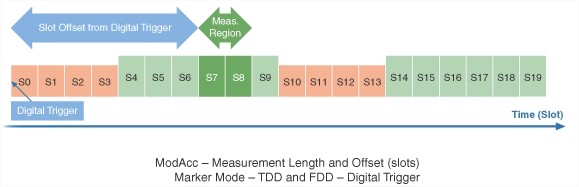
Figure 17: Marker Mode
RFmx General Settings
Averaging
In either automated design validation or production test applications, averaging multiple measurement results is a common technique to improve measurement repeatability. However, configuring a greater number of averages increases the overall measurement time. In general, total measurement time scales linearly with the number of averages used. For example, if a single measurement takes 10 ms, configuring 10 averages for the same measurement increases the total time to nearly 100 ms. However, this is not the case for NI-RFmx. NI-RFmx uses a technique called asynchronous processing, which is when the analyzer fetches a new record while the previous record is processed. As a result, you can configure a measurement for multiple averages without incurring a linear time penalty. Notice in Table 3 that with one average configured, an EVM measurement on a 16-QAM signal at 100kHz symbol rate and 1000 symbols takes 22ms.* However, with 10 averages configured, the measurement takes only 117 ms, which yields 11.7 ms per average.
| Averages | Measurement Time (ms) | Time Per AVG (ms) |
| 1 | 22 | 22 |
| 5 | 64 | 12.8 |
| 10 | 117 | 11.7 |
| 20 | 223 | 11.15 |
| 50 | 539 | 10.78 |
| 100 | 1068 | 10.68 |
Table 3: Measurement time increases with the number of averages
* - Measurements conducted using NI RFmx SpecAn 1.2 and PIXe-5645R VST on PXIe-8135 controller.
In addition, parallel averaging can be enabled by increasing the “Number of Analysis Threads” property value for a particular measurement. When the measurement processing takes more time than the acquisition, NI-RFmx launches parallel analysis threads to allow for concurrent computations. Note that this provides no speed benefit when the measurement analysis does not exceed the acquisition time, since one analysis thread will sufficient to handle the processing serially.
Figure 18: ACP:Number of Analysis Threads Property
Disable Traces
To speed up the measurement time, NI-RFmx disables all measurement traces by default. Disabling traces removes the overhead associated with generating the traces.
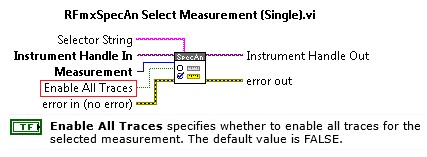
Figure 19: Enable All Traces control
Part II: Multi-measurement Optimization
There are four key techniques for performing multiple measurements, which are described below using NI-RFmx examples: serial measurements, composite measurements, multi-measurement parallelism with results naming, and measurement automation with signal naming.
Serial Measurements
A trivial way to perform multiple measurements is in serial succession. In RFmx API, every supported measurement includes a “Read” function that initiates an acquisition, analyzes the data, and fetches the results all within a single LabVIEW VI. In Figure 20, a channel power (CHP) measurement is performed followed by a transmit power (TXP) measurement on an incoming RF signal. Since these measurements are implemented serially, each measurement has its own independent acquisition. Only after the first measurement is acquired, analyzed and fetched, the second measurement begins. It is important to note that in this case, the TXP measurement will be performed using a different data set than the CHP measurement, since two separate acquisitions are performed at two distinct time instances.
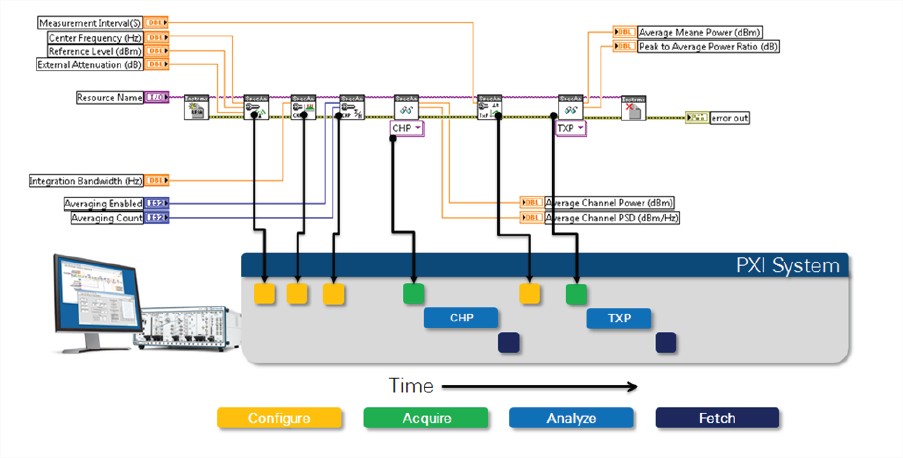
Figure 20: NI-RFmx Serial Measurement Program Execution Flow
Composite Measurements
A more time-efficient way to perform multiple measurements is to use the composite measurement feature in NI-RFmx. When a composite measurement is performed, all the measurements are based on the same acquired data. These measurements share a single data acquisition and analyze data in multiple ways according to the measurement settings that can be independently tuned for each measurement within a composite set. An additional benefit of composite measurements is that you can analyze the data in parallel, which reduces the total time to perform the same measurements serially. In the example below, two measurements are enabled, ACP and TXP. The Initiate function starts the two measurements by triggering the PXI module to acquire a single set of data. After the acquisition is complete, the data is transferred to the host. Then NI-RFmx spawns threads to analyze the data in parallel. You can fetch the results when the analysis is complete. Composite measurements offer not only faster measurement speed but also allow for multi-faceted analysis of the signal since multiple measurements can be performed on the same data.
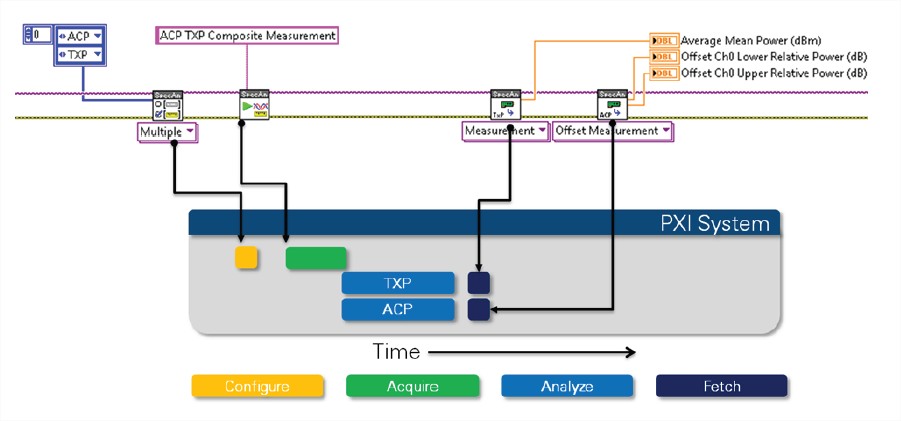
Figure 21: NI-RFmx Serial Measurement Program Execution Flow
Since there is a common acquisition for all the measurements in a composite set, a limitation of composite measurements is that all the measurements are consequently performed at the same center frequency. In addition, multi-span measurements that require a change in center frequency as part of the measurement (e.g Harmonics, Spurious Emissions) cannot be part of the composite set. Another caveat that needs to be considered is as follows: since composite measurement merges all the acquisition settings from all the measurements into one superset, which satisfies the acquisition requirements of all the measurements in a set, the settings of one measurement can affect the results of another. This only applies to acquisition settings that cannot be decoupled once merged. Other settings such as number of averages, RBW, etc. that can be decoupled from the acquisition are not affected by this issue. For example, if the user sets 10 averages for TxP and 20 averages for ACP, although the acquisition will be performed to accommodate 20 averages, only 10 averages will be used when the TxP measurement is computed.
Multi-Measurement Parallelism with Named Results
Many automated test applications require multiple independent measurements on a single instrument. Such applications include amplifier frequency/power sweeps or multi-DUT wireless device test. Often engineers implement these applications by serially sequencing measurements. With NI-RFmx, you can easily decouple acquisition from analysis with a feature called “Results Naming”. This feature works when measurements in a sequence are independent of previous results and both measurements are performed on separate acquisitions. Unlike composite measurements where same acquisition is used for multiple measurements, this technique vastly reduces the overall test time for a sequence of many measurements.
In the example below, ACP and TXP are performed on different acquisition configurations. This simple program completes the following operations.
- Initiate the ACP acquisition.
- Wait for the ACP acquisition to be complete and the PXI module to be released. NI-RFmx spawns a thread for the ACP analysis, but this is not visible to you.
- Initiate the TXP acquisition (likely before the ACP analysis is complete).
- Wait for the TXP acquisition to be complete (likely before the ACP analysis is complete).
- Fetch both measurement results when their respective analysis threads are complete.
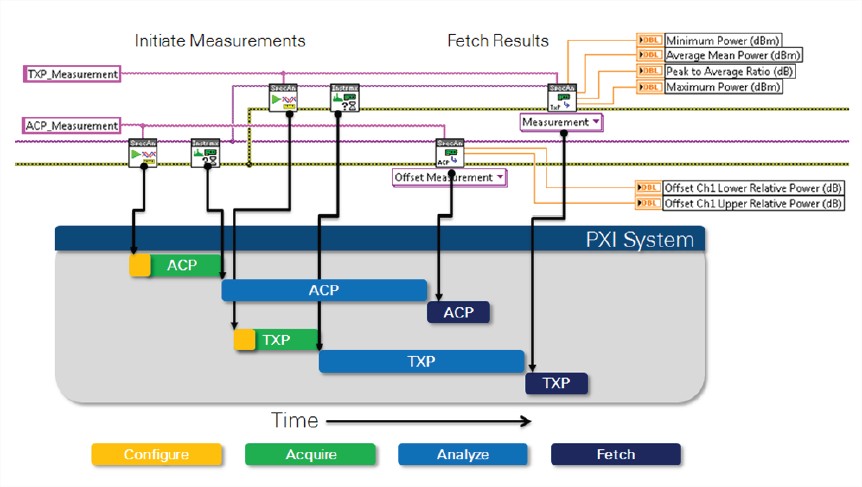
Figure 22: NI-RFmx Multimeasurement Parallelism Program Execution Flow
The key feature that enables overlapped measurements in NI-RFmx is “Results Naming”. In this example, both measurements are initiated and tagged with a name, and that name is then used to fetch the results. You can see the parallelism clearly in this example. The benefit of this technique is that it provides higher returns as the number of measurements in your sequence increases. Depending on the computational complexity of the measurement, this technique can have a huge impact on the overall test time. Measurement parallelism is a known technique to reduce test time; NI-RFmx makes this easier by managing threads and results and thereby helping you to develop and realize the benefit of PXI faster.
Measurement Speed Comparison
The following measurements were performed with a PXIe-8135 embedded controller using the PXIe-5644R vector signal transceiver (VST). The PXIe-5665 VSA was used for the high dynamic range with noise correction tests. All benchmarks were taken with 100 measurements in a loop. Table 4 shows the average per point. From these results, you can see that multi-measurement parallelism always has some benefit, but that benefit is more apparent for measurements that spend a large amount of time undergoing computation analysis, such as EVM. A test program with computation-dominated measurements, like EVM, shows significant speedup over acquisition-dominated measurements like
the high-dynamic-range ACP.
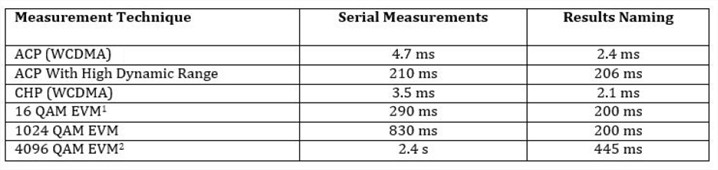
Table 4: Serial vs Parallel measurement times (Multi-measurement Parallelism Average per Point Benchmark)
1 All EVM measurements are performed with 20,000 symbols. No averaging.
2 Measurements are computation dominated rather than acquisition dominated. The per-point time goes up when the processor saturates. Results depend on the processor resources.
Simple Automation with Signal Configurations
Instrument reconfiguration can complicate and slow down a test program. With NI-RFmx, you can make reconfiguration easier by preconfiguring multiple measurements based on a signal name. In the example below, 300 independent measurement configurations are preassigned a name. In the inner loop, configurations are recalled by name, which removes the need to configure individual parameters. Fewer function calls are required in the inner loop, so test time and software complexity are reduced. You can use NI-RFmx signal naming and results naming together, as shown in this example, to achieve highly optimized parallel measurement performance with minimal code complexity. Allowing measurement configuration upfront with caching also provides an easier programming experience with measurement re-use.
Instrument settings are cached so that they are not recomputed when you come back to signal configuration. Precomputation happens on the first commit of the configuration and as long as no instrument settings are changed, the device will retain its settings through acquisitions. Otherwise, changing the signal configuration will force the instrument to recompute the RFinstr properties.
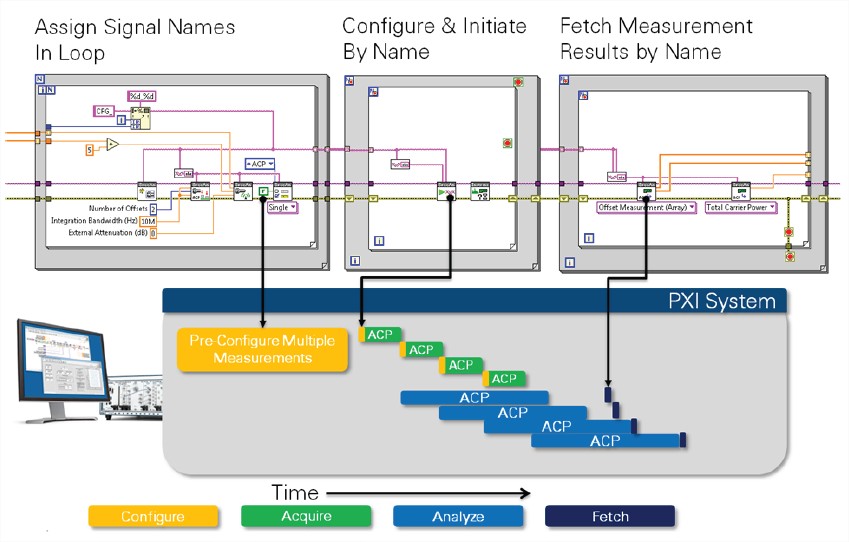
Figure 23: NI-RFmx Automation With Signal Naming Program Execution Flow
Keep in mind that the memory usage of your application increases when you use named signal configurations. It is not recommended to use named signal configurations when only a few attributes are different between the configurations. For example, when performing the same measurement (e.g ACP) across different frequencies, NI recommends that you use a single signal configuration and change the center frequency before each measurement.
Effect of CPU on Measurement Time
The CPU is one of the fundamental cores of a software-defined PXI measurement system. Especially for RF measurements, CPU performance is often the single most significant factor affecting measurement speed. Fortunately, as we have seen earlier you can utilize modern multi-core CPUs and programming flexibility of NI RFmx to deliver industry-leading measurement results.
While actual system performance can depend on a variety of factors, such as memory available and other applications running in the background, a definite correlation exists between the CPU performance and measurement time for automated test systems. Thus, the following table and figures are based on a benchmark using the PXI controllers listed in Table 5.
| Controller | CPU Type | Number of Cores | CPU Clock | Cache Size | Front Side Bus |
| NI-PXIe-8135 | Intel Core i7-3610QE | 4 | 2.3 GHz (3.3 GHz max) | 6 MB | 5 GT/s DMI |
| NI-PXIe-8880 | Intel Xeon E5-2618L v3 | 8 | 2.3 GHz (3.4 GHz max) | 20 MB | 8 GT/s QPI |
Table 5: Key Specifications of Various PXI Express Controllers
Several CPU characteristics can affect the overall measurement speed. Some of the most significant of these include the number of processing cores, CPU clock speed, front side bus, cache size, and system memory.
Figure 24, which illustrates the relationship between time and the number of constellation symbols analyzed, shows the effect of CPU on a 4096-QAM EVM measurement time. You can see that faster eight-core controllers such as the NI PXIe-8880 perform EVM measurements faster regardless of the number of symbols. And as the demand for higher processing power increases with higher number of symbols, the benefit of a faster controller becomes more visible.
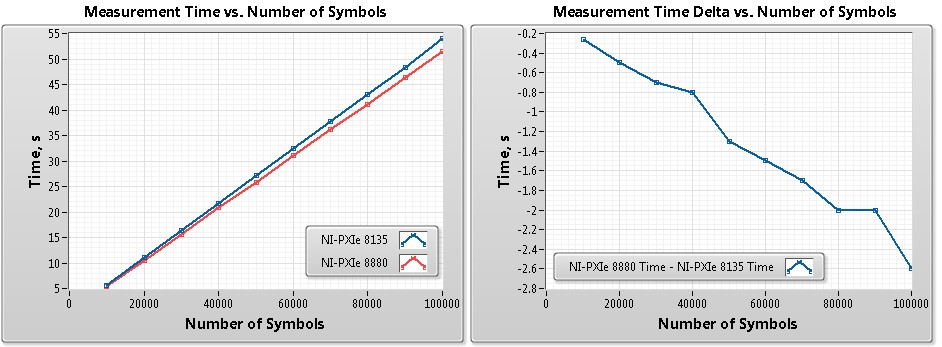
Figure 24: Measurement time improves with faster CPU (4096 QAM EVM with 5 averages, 100kHz symbol rate)
From the above graph, PXIe-8880 analyzes 100000 symbols in 4096 QAM constellation and is faster than the PXIe-8135 controller by 2.4 seconds.
Instrument Driver FPGA Extensions
For NI software-designed instruments, NI-RFmx preserves support for instrument driver FPGA extensions, so that you can pair advanced optimizations, such as fast power servo or
automated DUT control, with the power and ease of use of NI-RFmx. The benefit is the performance of the FPGA with a known and trusted measurement stack with long-term compatibility. Instrument driver FPGA extensions apply to NI VSAs, such as the industry-leading PXIe-5646R and PXIe-5840 VSTs, and the best-in-class 26.5 GHz wideband PXIe-5668R VSA.
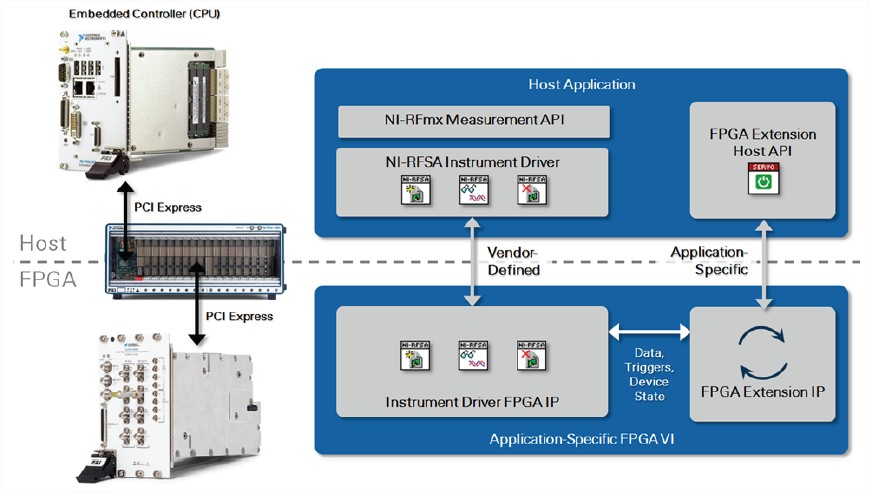
Figure 25: NI-RFSA Instrument Driver FPGA Extensions and NI-RFmx Integration Diagram