Connecting Encoders to the NI 951x C Series Drive Interface Module
Overview
Contents
- Required Hardware
- What is an encoder?
- Encoders and the NI 951x
- Connecting Your Encoders
- Related Resources
One of the key elements of a motion system is feedback. Without feedback, it is very difficult to accurately know where we are versus where we think we are. The most common form of feedback in a motion system is a quadrature or incremental rotary encoder.
Required Hardware
For this tutorial, the following items will be required:
-
- Computer with LabVIEW
- NI CompactRIO chassis and controller
- Any NI 951x C Series Drive Interface Module
- NI 951x Cable and Terminal Block Bundle
- Quadrature encoder
- Cabling for all of the above
What is an encoder?
An encoder is an electromechanical device that can measure motion or position. Most encoders use optical sensors to provide electrical signals in the form of pulse trains, which can be translated into motion, direction, or position.
This document will discuss using quadrature encoders in motion systems using the NI 951x C Series Drive Interface Modules. Quadrature encoders use two code tracks with sectors positioned 90 degrees out of phase. The signals from these two code tracks are interpreted in software to determine both position and the direction of rotation. Refer to the Related Resources section at the end of this document for more information about encoder operation, NI 951x Modules, and NI SoftMotion.
Encoders and the NI 951x
Connecting encoders to the NI 951x C Series Drive Interface Modules requires the purchase of the NI 951x Cable and Terminal Block Bundle. Encoder connections can be made from there by following the pinout diagram in the Operating Instructions for the device. The 37-pin terminal block has a different encoder pinout for each module due to their differing functionality.
Notice that the encoder pinout has terminals for plus and minus lines on each of the A, B, and Index lines of the encoder to allow for connecting to differential encoders. If the encoder only has one wire for each output of A, B, and Index, then you will need to connect the ground of the encoder signal to each of the minus pins on the terminal block. These encoders are known as single-ended encoders. Refer to the module Operating Instructions for single-ended and differential encoder connection diagrams.
Connecting Your Encoders
All of the NI 951x Modules have the same pins in use for Encoder 0, so we will discuss all three together. The NI 9516 provides connection for a second encoder to perform dual encoder feedback. The connection for the NI 9516 Encoder 1 is the same as Encoder 0 except that Encoder 1 does not contain an Index line.
For the purposes of this tutorial, we are assuming that you are using the NI 951x 37-pin Terminal Block. If you are creating custom cabling for your motion system, refer to Chapter 4, Accessory and Cable Connections, in the NI 951x User Manual for additional wiring information.
We have eliminated all of the irrelevant terminals from the pinout diagram for this example. The colors that we are using in these examples for wires are not indicative of the colors you may encounter. There are no standard colors for each line of an encoder, and your encoder may be different.
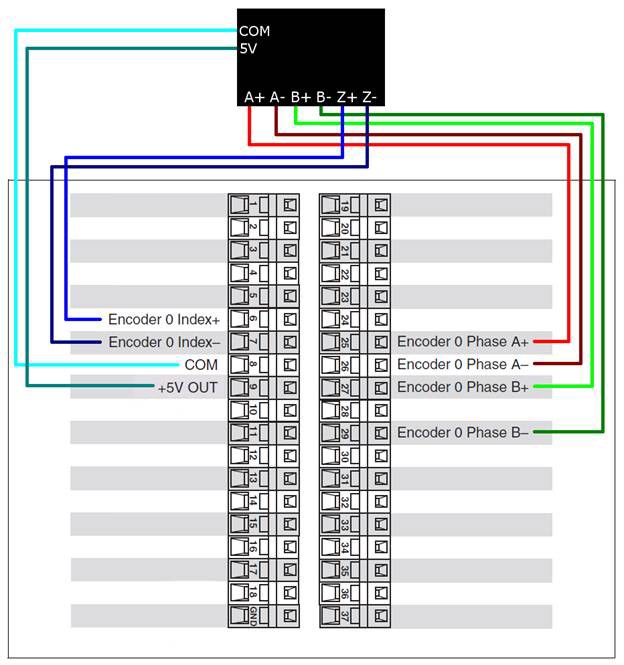
Differential Encoders
First, we will take a look at wiring to a differential encoder, one which has a plus and minus wire for each line of the encoder: A, B and Index. In these diagrams, and commonly in industry, the Index line is referred to as the Z line.
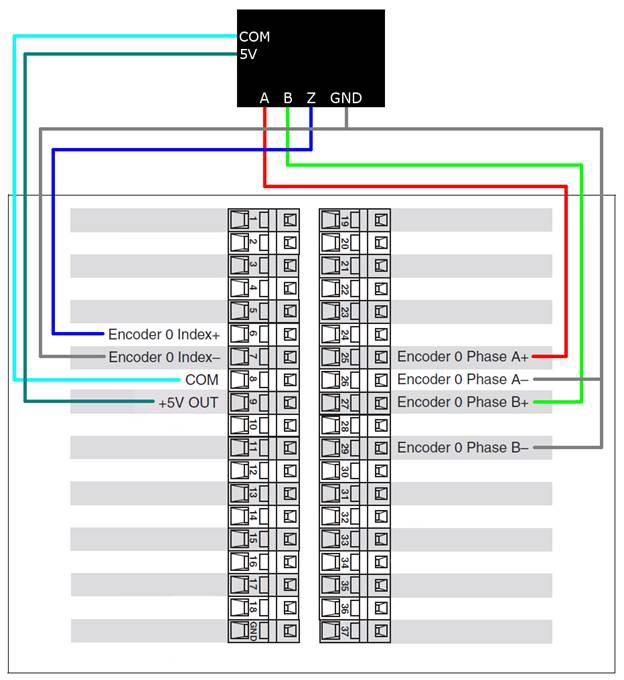
Single-Ended Encoders
Some encoders use only one wire for each line and have a common ground for all of the lines together. This can be handled by the 951x Terminal Block by wiring the ground line of the encoder into each minus pin of the terminal block. Any methodology for tying all of the minus lines together will accomplish this successfully. This is shown below.