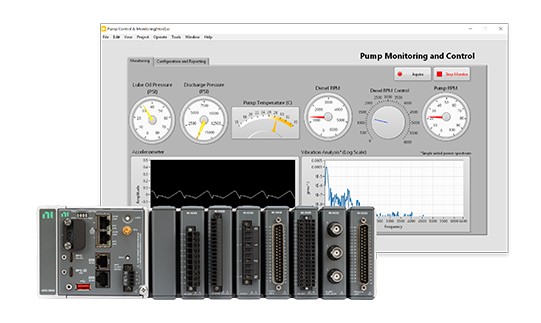


Die CompactRIO-Hardware bietet eine industrielle Steuerungs- und Überwachungslösung mit sensor- oder protokollspezifischen I/O-Modulen mit Echtzeitfunktionen.
Geeignet für
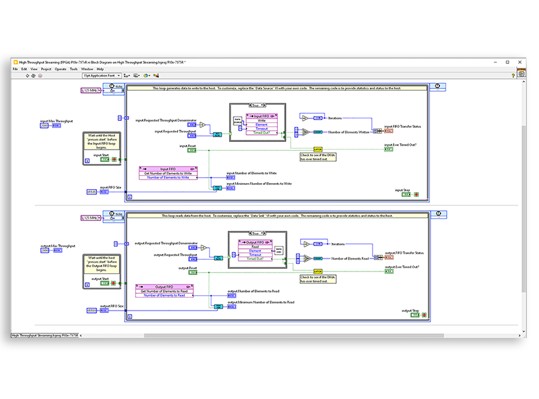
Anforderungen an die Echtzeitverarbeitung
Industrie-, Überwachungs- und Steuerungsanwendungen
Langfristige Tests vor Ort