From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
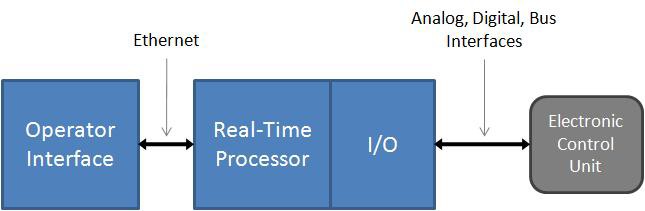
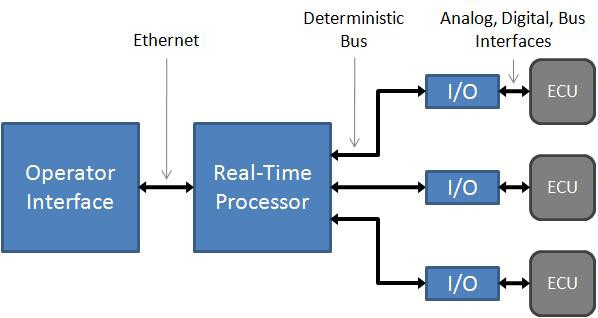
Ein HIL-Prüfsystem umfasst drei Hauptbestandteile: einen Echtzeitprozessor, I/O-Schnittstellen und eine Bedienoberfläche. Der Echtzeitprozessor bildet dabei die Grundlage des HIL-Prüfsystems. Er sorgt für die deterministische Ausführung eines Großteils der Prüfsystemaufgaben, u. a. die Hardware-I/O-Kommunikation, Datenprotokollierung, Stimuluserzeugung und Modellausführung. Ein Echtzeitsystem ist notwendig, um eine präzise Simulation der realen Systembestandteile zu erreichen. Über die I/O-Schnittstellen werden Analog-, Digital- und Bussignale zwischen dem System und dem Prüfling ausgetauscht. Die Schnittstellen können zur Erzeugung von Stimulussignalen, Erfassung von Daten für Protokollierung und Analyse und zur Übertragung von Sensor-/Aktorsignalen zwischen dem zu prüfenden elektronischen Steuergerät (Electronic Control Unit, ECU) und der virtuellen Umgebung eingesetzt werden. Die Bedienoberfläche kommuniziert mit dem Echtzeitprozessor und sorgt für die Prüfanweisungen und Datendarstellung. Häufig werden über die Bedienoberfläche auch Aufgaben wie Konfigurationsverwaltung, Prüfautomatisierung, Analyse und Berichterstellung durchgeführt.
Abbildung 1: Ein HIL-Prüfsystem besteht aus drei Hauptbestandteilen: Echtzeitprozessor, I/O-Schnittstellen und Bedienoberfläche.
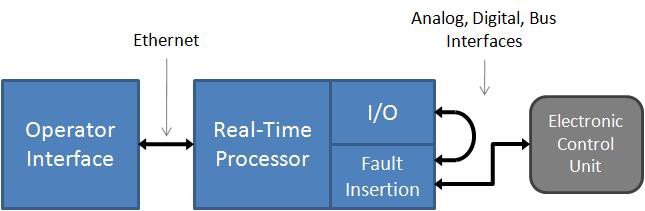
Viele HIL-Prüfsysteme nutzen die Hardwarefehlersimulation (Hardware Fault Insertion), um zwischen der ECU und dem Rest des Systems Signalfehler einzubauen, damit das Geräteverhalten unter diesen Bedingungen untersucht werden kann. Hierfür eignet sich der Einsatz sogenannter Fault Insertion Units (FIUs) zwischen den I/O-Schnittstellen und der ECU, wodurch normale und fehlerhafte Betriebsbedingungen, wie z. B. Kurzschluss und Leerlauf, hervorgerufen werden können.
Abbildung 2: Mit Hardwarefehlersimulation lässt sich das Verhalten von Steuergeräten unter fehlerhaften Signalbedingungen überprüfen.
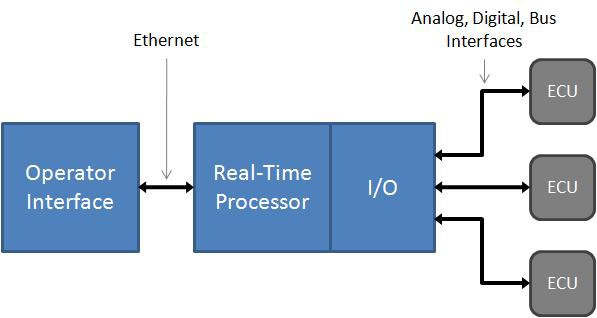
Bei einigen Embedded-Steuer- und -Regelsystemen wie z. B. im Automobil- und Flugzeugbau oder auch in Windkraftanlagen kommen mehrere, miteinander vernetzte ECUs zum Einsatz. Obwohl alle diese Einheiten ursprünglich einzeln und unabhängig voneinander überprüft werden, kommt häufig ein integriertes HIL-Prüfsystem wie z. B. ein Fahrzeug- oder Flugzeugrestsimulator zum Einsatz, um eine umfassendere virtuelle Überprüfung durchzuführen.
Abbildung 3: Bei Automobilen, Flugzeugen und Windkraftanlagen kommen mehrere ECUs zum Einsatz.
Bei der Überprüfung mehrerer ECUs in einem System (manchmal jedoch auch bei Systemen mit nur einem Steuergerät) bestehen häufig zwei Anforderungen: zusätzliche Verarbeitungsleistung und vereinfachte Signalanbindung.
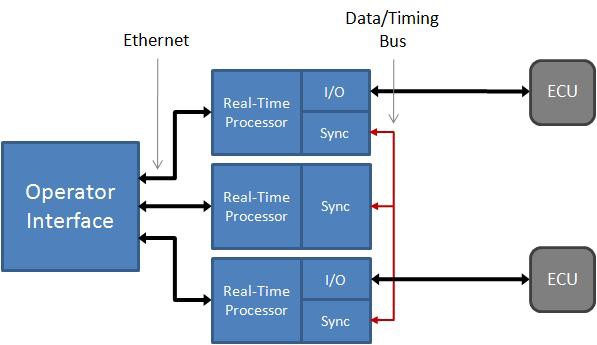
Einige Systeme erfordern trotz Multicore-Technologie zur Steigerung der Verarbeitungsleistung eine höhere Leistung als ein einziger PC zur Verfügung stellen kann. Um dieser Herausforderung zu begegnen, können Sie verteilte Verarbeitungstechniken verwenden, um die Leistungsanforderungen dieser Systeme zu erfüllen. Bei Systemen mit sehr hoher Kanalanzahl geht es nicht nur um eine höhere Verarbeitungsleistung, sondern auch um zusätzliche I/O. Einige Systeme setzen für große und prozessorauslastende Modelle häufig weitere Rechnereinheiten ein, mit denen zusätzliche Verarbeitungsleistung zur Verfügung steht und die einzelnen Prozessoren einem Task zugeordnet bleiben. Abhängig davon, wie die Simulationsaufgaben verteilt werden, können gemeinsame Trigger- und Timing-Signale sowie deterministische Datensynchronisation zwischen den Rechnereinheiten notwendig sein, um einen reibungslosen Betrieb zu gewährleisten.
Abbildung 4: Beim Einsatz mehrerer dezentraler Rechnereinheiten für zusätzliche Verarbeitungsleistung müssen häufig Timing-Signale und Daten synchronisiert werden.
Die Implementierung und Aufrechterhaltung der Signalanbindung bei Systemen mit hoher Kanalanzahl gestaltet sich häufig kosten- und zeitintensiv. Bei diesen Systemen können tausende Signalverbindungen zwischen ECU und dem HIL-Prüfsystem notwendig sein.
Deterministische verteilte I/O bieten hierfür modulare Anbindungsmöglichkeiten an die ECUs, wodurch Änderungen bei der Systemkonfiguration effizienter durchgeführt werden können. Anstatt alle Verbindungen auf das Echtzeitsystem mit den I/O-Schnittstellen zu routen, können die deterministischen verteilten I/O modular in unmittelbarer Nähe der jeweiligen ECU eingesetzt werden, ohne dass der Determinismus, der für eine präzise Simulation der virtuellen Systemteile notwendig ist, verloren geht.
Durch diesen Ansatz lassen sich die Verbindungskosten und -schwierigkeiten reduzieren, da die ECU mit den I/O-Schnittstellen verbunden ist (über Entfernungen von weniger als 1 m) und die Anbindung an die Rechnereinheit nur über ein Buskabel erfolgt. Darüber hinaus können HIL-Testsysteme aufgrund des modularen Charakters dieses Ansatzes leicht schrittweise von einem Multi-ECU-Testsystem, in dem alle ECUs bis auf eines simuliert werden, zu einem HIL-Testsystem mit vollständiger Systemintegration skalieren, in dem keine der ECUs, die vorhanden sind, simuliert werden muss.
Abbildung 5: Deterministische verteilte I/O sorgen für eine Reduzierung der Verbindungskosten und -komplexität, da sich die I/O-Schnittstellen unmittelbar an der jeweiligen ECU befinden.
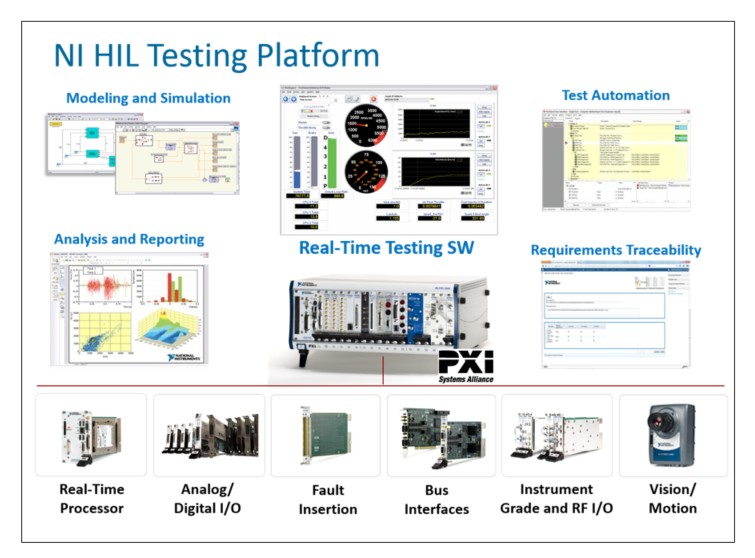
Sobald der Aufbau des Prüfsystems festgelegt wurde, besteht der nächste Schritt in der Auswahl der Komponenten, die am besten den Anwendungsanforderungen entsprechen. National Instruments bietet hierfür eine große Auswahl an Optionen für die Echtzeitverarbeitung sowie I/O für HIL-Prüfsysteme. Alle Produkte basieren auf offenen Industriestandards, sodass Anwendern stets aktuelle PC-Technologien zur Verfügung stehen und Systeme auch an zukünftige Anwendungsanforderungen angepasst werden können.
Die HIL-Plattform von NI ist offen und erweiterbar. Das bedeutet, dass sie wechselnden Systemanforderungen entsprechend skaliert werden kann. Aufgrund ihres modularen Aufbaus kann die HIL-Plattform mühelos um zusätzliche Funktionen erweitert werden. So wird gewährleistet, dass Prüfsysteme zukunftssicher sind sowie die höchsten Anforderungen an Embedded-Softwareprüfanwendungen erfüllt werden. Neben der größten auf dem Markt verfügbaren Auswahl an I/O bietet NI auch Softwarewerkzeuge, mit denen HIL-Tests automatisiert, Nachverarbeitungen und Berichterstellungen durchgeführt und Prüfergebnisse mit den Anforderungen abgeglichen werden können. Mit diesen Werkzeugen lassen sich vielfältigere Tests zu einem früheren Zeitpunkt während der Softwareentwicklung durchführen, wodurch die Gesamtentwicklungskosten gesenkt werden und gleichzeitig die Produktqualität steigt.