NI PXI Timing and Synchronization Design Advantages
Contents
- Overview
- Timing and Synchronization for PXI and PXI Express Chassis
- Signal and Time-Based Synchronization
- Oscillator Options
- NI-TClk
- Next Steps
Overview
With PXI timing and synchronization modules, you can implement advanced multidevice synchronization by using the trigger bus, star trigger, and system reference clock features of PXI. Through shared timing and synchronization, you can vastly improve the accuracy of measurements, apply advanced triggering schemes, or synchronize multiple devices to act as one for extremely high-channel-count applications. National Instruments is the only major test and measurement vendor that offers a PXI timing and synchronization product line. This portfolio spans low-cost solutions to the industry’s highest performance PXI Express timing and synchronization module, the NI PXIe-6674T, to deliver the advantages of synchronization to numerous applications.
With the wide variety of NI PXI timing and synchronization modules, you can:
- Control the PXI trigger bus and PXI star trigger lines
- Generate high-stability OCXO PXI system reference clocks (CLK10)
- Generate high-precision DDS clocks
- Synchronize PXI instruments with GPIB, VXI, and other instruments
- Synchronize multiple PXI chassis
Timing and Synchronization for PXI and PXI Express Chassis
NI provides timing and synchronization solutions for both PXI and PXI Express chassis. As the latest evolution of the PXI platform, PXI Express is designed to deliver a higher degree of synchronization to measurement I/O devices than PXI-1 while remaining backward compatible. PXI Express maintains the 10 MHz backplane clock as well as the single-ended PXI trigger bus and length-matched PXI star trigger signal provided by the original PXI specification. PXI Express also adds a 100 MHz differential clock and differential star triggers to the backplane to offer increased noise immunity and industry-leading synchronization accuracy (250 ps and 500 ps of module-to-module skew, respectively). NI timing and synchronization modules are designed to take advantage of the advanced timing and triggering technology featured in its PXI and PXI Express chassis.
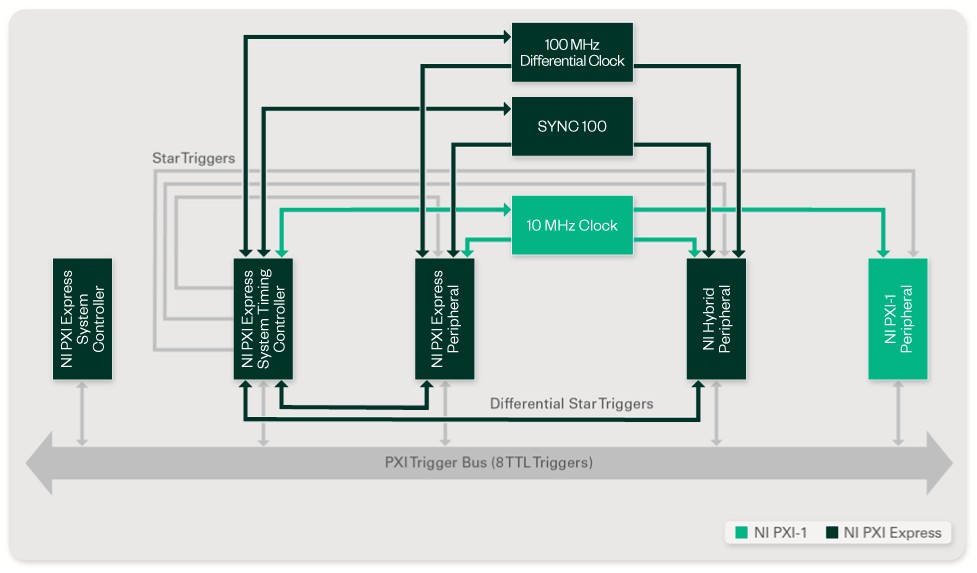
Figure 1. PXI Chassis Timing and Synchronization Features
Signal and Time-Based Synchronization
NI PXI timing and synchronization modules work with two different types of synchronization architectures, signal-based and time-based, so you can achieve the flexibility and customization you need when developing applications that require different levels of performance.
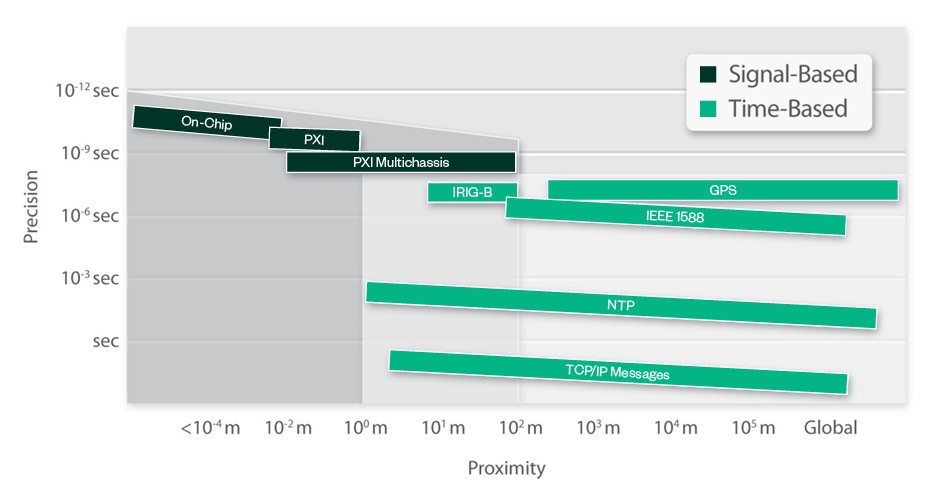
Figure 2. Signal-Based and Time-Based Synchronization Architecture Performance
With an NI PXI signal-based timing and synchronization architecture, clocks and triggers are physically connected between subsystems. This typically generates the highest precision of synchronization. However, above certain subsystem-connecting cable distances (approximately 200 m), this performance is unachievable due to clock skew and clock drift.
If the required distance between synchronized chassis is too great for cables to reliably transmit clock and trigger signals, you need to use a time-based synchronization architecture. With an NI PXI timing and synchronization solution, you can use absolute time reference protocols such as IEEE 1588, GPS, and IRIG-B to achieve synchronization over large distances.
Oscillator Options
With the timing and synchronization capabilities built in to the PXI platform, you can distribute a 10 MHz and/or 100 MHz system reference clock on the backplane to achieve synchronization across modules within a PXI chassis. Likewise, you can distribute the 10 MHz reference clock between chassis backplanes to synchronize modules in multiple PXI chassis. This system reference clock is driven by an independent oscillator frequency source on the chassis backplane. No oscillator perfectly generates the specified frequency, the major clock error components being accuracy, stability, and jitter. For an NI PXI Express chassis, this oscillator is accurate to 25 parts per million (ppm). Inserting an NI PXI timing and synchronization module with an oven-controlled crystal oscillator (OCXO) into the system timing slot of the chassis enables the user to replace this backplane system reference clock with an oscillator frequency source that is accurate to 50 parts per billion (ppb). In addition, inserting an NI PXI timing and synchronization module with a temperature compensated crystal oscillator (TCXO) enables the user to replace the backplane system reference clock with an oscillator frequency source that is accurate to 1 ppm.

Figure 3. NI PXIe-6674T—The Industry’s Highest Performance PXI Timing and Synchronization Module With OCXO
With NI PXI timing and synchronization modules, you can improve the overall system clock error by sharing a precision clock source among multiple PXI devices. If you install a PXI module with a low clock error, such as a module with an OCXO or a TCXO in the system timing slot, then the PXI modules with phased-lock loop (PLL) circuits can take advantage of the high-precision clock in that slot. When disciplining the PXI 10 MHz reference clock to an NI PXI OCXO frequency source, you can achieve uncertainty of 0.5 Hz. Disciplining the PXI 10 MHz reference clock to an NI PXI TCXO frequency source helps you achieve uncertainty of 10 Hz.
NI-TClk
For applications requiring the synchronization of high-speed PXI modular instruments, distributing the necessary clocks and triggers to achieve this synchronization can be challenging because of the latencies and timing uncertainties caused by skew and jitter.
NI has developed a patented method for synchronization whereby another signal-clock domain is used to enable alignment of sample clocks and the distribution and reception of triggers, called NI-TClk. NI-TClk technology is designed to:
- Align the sample clocks that may not necessarily be aligned initially despite being phase locked to the 10 MHz reference clock
- Enable the accurate triggering of synchronized devices
The flexible NI-TClk technology is applicable to the following use cases:
- High-speed modular instrument synchronization with a sample clock or reference clock
- Extension of synchronization from a single PXI chassis to several PXI chassis to address high-channel systems using a system timing module
- Homogeneous and heterogeneous synchronization—devices running at the same or different sample rates using internal or external sample clocks
NI-TClk technology delivers PXI modular instrument synchronization performance improvements right out of the box. The key software components comprise three LabVIEW VIs/C functions that require no parameters to be set. NI-TClk architectures can deliver synchronized devices with skews of at worst 1 ns between each device. Typical skews observed are in the range of 200 ps to 500 ps. Manual calibration of the sample clock on each device can lower skews to less than 30 ps between devices.
Figure 4. Required NI-TClk Functions