From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
EtherCAT RIO扩展机箱和一套工业通信驱动程序支持一种开放性实时以太网协议,称为EtherCAT。EtherCAT非常适用于需要确定性和同步性的高速I/O和控制应用。本技术白皮书介绍了适用于NI产品的EtherCAT技术的基础知识,其中包括协议基础、数据传输和分布式时钟同步。
EtherCAT(以太网控制自动化技术)是一种用于确定性以太网的高性能工业通信协议。它对IEEE 802.3以太网标准进行了扩展,能够借助可预测的定时和精确的同步功能实现数据传输。这一开放标准由EtherCAT技术组管理,已作为IEC 61158的一部分发布,通常用于机器设计和运动控制等应用。
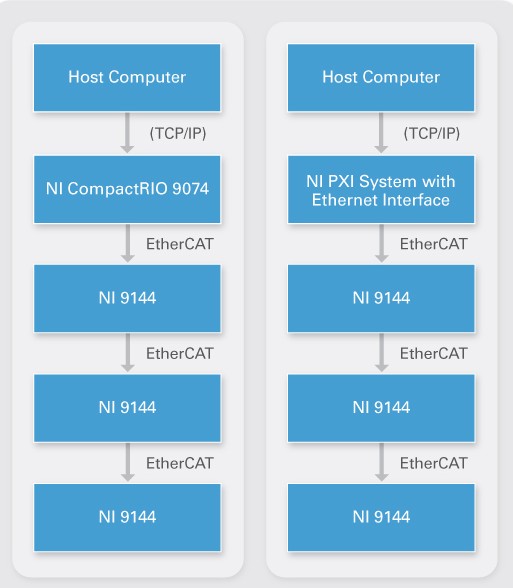
EtherCAT基于标准的以太网布线实现主/从架构。NI的EtherCAT主站由具有NI CompactRIO等双以太网端口的实时控制器、PXI和工业控制器组成。此外,每个NI从站包含两个端口,支持通过主站控制器建立菊花链连接。
图1.EtherCAT主/从架构与NI硬件
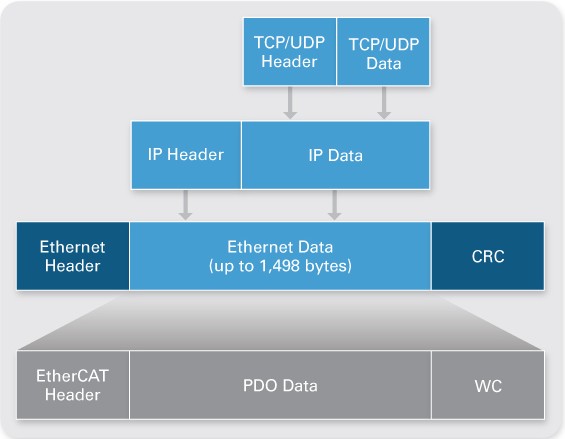
EtherCAT协议支持直接在标准以太网帧内传输数据,而不改变其基本结构。当主站控制器和从站设备处于同一子网时,EtherCAT协议只相当于替代了以太网帧中的互联网协议(IP)。
图2.以太网帧结构与EtherCAT
主站和从站之间以过程数据对象(PDO)的形式进行数据通信。每个PDO都有一个地址,指向一个特定从站或多个从站,这种“数据和地址”的组合(加上用于验证的工作计数器)构成了EtherCAT报文。一个以太网帧可以包含多个报文,而要容纳一个控制周期所需的所有报文,则可能需要多个帧。
借助一些实时协议,主站控制器可发送数据包,但必须等待过程数据在每个从节点得到解析和复制。然而,由于主站控制器必须为每个从节点增加一定的处理时间和抖动,并对其进行管理,因此这种确定性方式可能难以持续使用。
EtherCAT技术可即时处理每个以太网帧,因而克服了这些系统限制。例如,假设以太网帧是一列行进的火车,而EtherCAT报文是火车车厢。PDO数据位是车厢里的人,可被相应的从站提取或插入。整列“火车”不停地通过所有从设备,然后在最后一个从设备处折回,再次穿过所有从设备。
图3.EtherCAT数据传输
同样,当设备1遇到主站发送的以太网数据包时,它会自动开始将数据包流式传输至设备2,同时对数据包进行读写操作,整个过程只有几纳秒的延迟。由于数据包在从设备之间不断传输,因此它可以同时出现在多个设备中。
这实际上意味着什么呢?假设有50个从设备,我们分别向每个从设备发送不同的数据。对于非EtherCAT实现而言,这可能意味着发送了50个不同的数据包。而对于EtherCAT来说,只是发送了一个触及所有从设备的长数据包,该数据包包含了相当于50个设备的数据。不过,如果所有的从设备都需要接收相同的数据,则相当于发送了一个短数据包,从设备在数据包以流式传输通过时都会查看同一部分内容,这样可以优化数据传输速度和带宽。
EtherCAT旨在为单点应用(如控制)实现高性能和高通道数。由于从站的读和写可以在同一帧中进行,EtherCAT报文结构针对分散式I/O进行了优化。另外,完整的协议处理是在硬件内进行的,因此不受协议栈运行时间、CPU性能或软件实现的影响。而且,每个NI从设备会使用多个现场总线内存管理单元(FMMU),专门用于PDO传输和地址检查。从站(而非主站)负责将相应的报文映射至自身,因此降低了主站的复杂性,并释放了其资源。
实现确定性网络的另一个因素是,主站控制器负责通过分布式时钟实现所有从设备的时间同步。其中必须有一个从设备包含主时钟,用来同步其他从设备的时钟。对于NI实现,第一个从设备被指定为配备主时钟,然后主站控制器在每个扫描周期发送一个用于读取主时钟的特殊同步报文。然后,此报文会更新并重新调整所有其他从设备的时钟,从而防止漂移。
当广泛分布的进程需要同时运行时(如运动轴之间的协调运动控制),准确的同步就尤为重要。NI使用时间戳来测量离开和返回帧之间的时间差。通过这种方式,计算出节点之间的传播延迟,然后通过精确调整分布式时钟实现精确同步(小于1 µs)。
NI的平台产品多种多样,可兼容基于EtherCAT的确定性分布式I/O。对于主站控制器,您可以使用带有两个以太网端口的NI CompactRIO控制器、带有NI PXI-8231/8232以太网接口的PXI系统,或工业控制器。然后,您可通过菊花链方式将多个NI 9144或NI 9145从机箱连接至控制器,从而扩展时间关键型应用,同时以最少的处理器资源维持高度确定性。NI 9144和NI 9145是8槽机箱,坚固耐用,可与50多个C系列模块配合使用。这些模块涵盖各种模拟、数字、运动控制和专用I/O,可提供直接的传感器连接,并支持在其他NI硬件平台和型号上复用。
图4.NI工业控制器与NI 9145从机箱
值得一提的是,此类产品现成即用,可自动识别NI LabVIEW图形化编程环境中所有已连接的从设备及其模块,因而大幅减少了NI EtherCAT从机箱的配置。通过LabVIEW Real-Time模块,您可以使用可单击并拖拽的I/O变量、实时测试面板和I/O强制功能来轻松访问物理通道,从而进行故障分析。
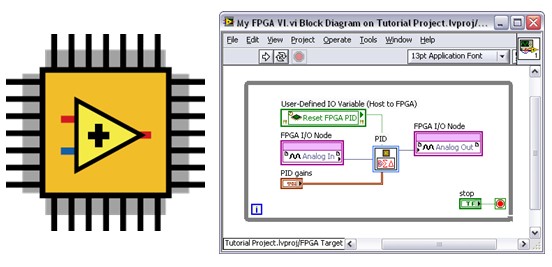
借助LabVIEW FPGA模块,您可以在每个NI从设备上嵌入硬件级逻辑,以分载主站控制器的处理,同时通过直接制定节点级决策来减少响应时间。您还可以进行波形测量,使用现场可编程门阵列(FPGA)进行板载分析,然后将单点结果传回控制器。
图5.NI LabVIEW为NI EtherCAT主站和EtherCAT从机箱的现场可编程门阵列(FPGA)芯片提供简单的图形化编程工具。