From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
Dynamic data acquisition has always been at the heart of every sound and vibration application. However, it is not enough to simply be able to acquire data, you also have to be able to analyze, process, and interpret the raw data into meaningful content.
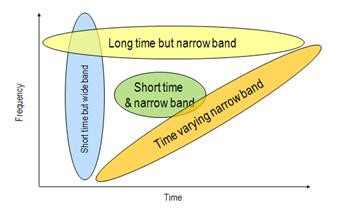
Sound and vibration transducers produce complex time series waveforms, within which are many specific signatures. It is important to understand these different vibration signatures and how to properly extract them for trending analysis. With proper signature information, it becomes possible to tabulate specific metrics which can drive plant maintenance or production schedules. There are a variety of different types of signal complexities, corresponding to different sound and vibration phenomena as represented in Figure 1 from top to bottom:
Figure 1. Various vibration signal complexity types
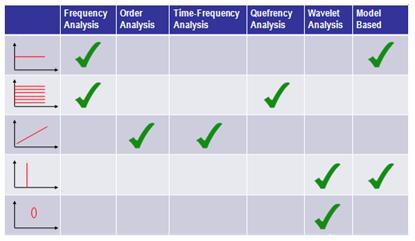
The first step in any sound and vibration application is to understand the system you are trying to monitor and the sound and vibration signals present in it. After this has been defined, the next step is to choose the correct algorithm for extracting the signal feature of interest from the raw signal. Figure 2 shows the different types of signals and the algorithm that National Instruments provides for extracting those features.
Figure 2. Different analysis algorithms and which signals they are ideal for use with.
National Instruments provides a range of algorithms such as standard frequency analysis; order analysis for monitoring rotating components such as a gearbox; time-frequency analysis for time varying sound and vibration signals; quefrency analysis for detecting harmonics; and wavelet and model based analysis for transient detection. This complete collection of algorithms provides users the ability to properly analyze and monitor their specific machine or device.
Frequency analysis is the most commonly used method for analyzing a vibration signal. The most basic type of frequency analysis is an FFT, or Fast Fourier Transform, which converts a signal from the time domain into the frequency domain. The product of this conversion is a power spectrum and shows the energy contained in specific frequencies of the overall signal. This is quite useful for analyzing stationary signals whose frequency components do not change over time.
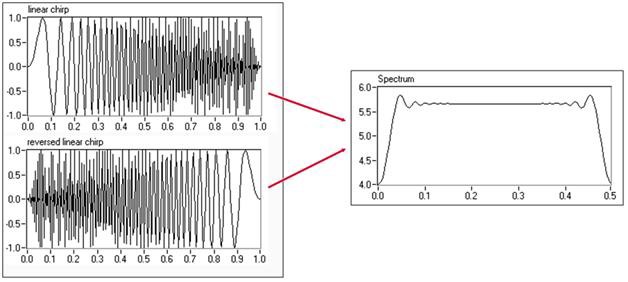
Despite its common use, there are many downfalls to just using frequency analysis because its results, such as a power spectrum or total harmonic distortion, contain only the frequency information of the signal. They do not contain time information. This means that frequency analysis is not suitable for signals whose frequencies vary over time. This idea can even be extended further to imply that there are an infinite number of signals that could produce the same power spectrum. As an example, in Figure 3 we have two chirp signals. The top signal’s frequencies increase with time while the bottom signal’s frequencies decrease with time. Although the frequency behavior of the two signals is different, their frequency spectra (left) computed by the FFT are identical because the energy at individual frequencies in each signal is the same. There are a number of completely different signals that can produce this same spectrum.
Figure 3. A signal and its reverse both produce the same frequency spectrum because there is no time data associated with the signals.
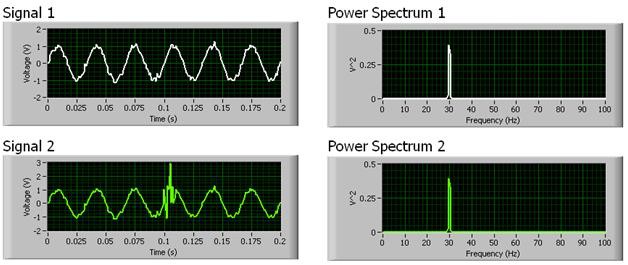
The second limitation of the FFT is that it cannot detect transients or short spikes in the signal. Transients are sudden events that last for a short time in a signal and usually have low energy and a wide frequency band. When transients are transformed into the frequency domain, their energy is spread over a wide range of frequencies. Since transients have low energy, you might not be able to recognize their existence in the frequency domain. In Figure 4, two similar signals can be seen, with Signal 2 containing a transient. Despite the presence of the transient, the power spectra of both signals are identical because the energy of this transient is spread over a wide range of frequencies.
Figure 4. The transient in Signal 2 cannot be seen in the frequency analysis of the signal because its energy is spread over a wide range of frequencies.
When performing vibration analysis many sound and vibration signal features are directly related to the running speed of a motor or machine such as imbalance, misalignment, gear mesh, and bearing defects. Order analysis is a type of analysis geared specifically towards the analysis of rotating machinery and how frequencies change as the rotational speed of the machine changes. It resamples raw signals from the time domain into the angular domain, aligning the signal with the angular position of the machine. This negates the effect of changing frequencies on the FFT algorithm, which normally cannot handle such phenomena.
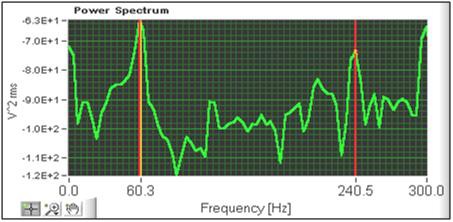
To better understand this analysis, examine the power spectrum in Figure 5. There are two large peaks in this power spectrum. The first peak at 60 Hz corresponds to the shaft rotational speed of a machine. The second peak, which is the 4th harmonic of the rotational speed, corresponds to the bearings of the machine. If we would like to monitor the health of the bearings it is important that we follow this 4th harmonic.
Figure 5. Power spectrum of a rotating wind turbine gearbox at 60 Hz.
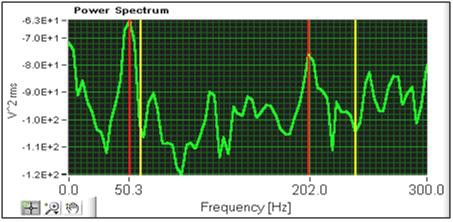
However, as the speed changes downward to 50 Hz, the 4th harmonic of the power spectrum shifts downward. The peaks in a power spectrum of a rotating device are all related to the fundamental rotational speed of that device. So, even if the FFT is able to clearly analyze the data and show the power spectrum for the machine, it is not capable of easily tracking speed driven harmonics.
Figure 6. Power spectrum a rotating wind turbine gearbox at 50 Hz.
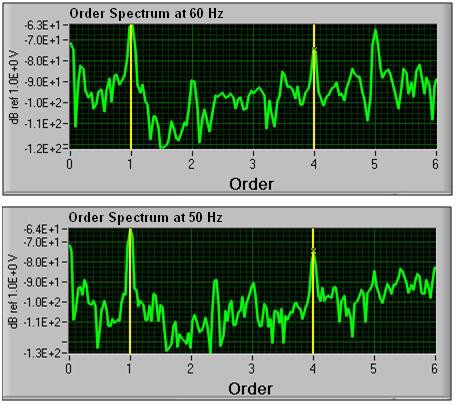
In order analysis, instead of taking the FFT of the time domain data, the signal is first resampled into the angular domain. Resampling combines the speed measurements taken from a tachometer on the machine with the vibration measurements and interpolates the vibration measurements into a data point per fraction of angular rotation. The vibration measurements are now in the angular domain as compared to the former time domain. Once in the angular domain, an FFT can be performed on the angular domain vibration measurement to produce what is known as an order spectrum. Figure 7 shows the order spectra of the same shaft at both 60 Hz (top) and 50 Hz (bottom).
Figure 7. Order spectra of the wind turbine rotating at 60 Hz (top) and 50 Hz (bottom).
Notice that the 4th harmonic is no longer in terms of frequency but harmonics, or orders of the fundamental rotational speed of the machine, where the first order corresponds to one times the rotational speed of the machine and the fourth order corresponds to four times the rotational speed. The 4th harmonic no longer shifts as the rotational speed of the machine changes, making it much easier to monitor the harmonics of a rotating system.
One of the drawbacks of frequency analysis was that, with no time domain data associated with the signal, it was only useful for static signals. Time-Frequency Analysis (sometimes called Joint Time-Frequency Analysis or JTFA) allows a work around to this problem. Time-frequency Analysis is the process of taking multiple FFT’s of small portions of data, or rather data that was taken over a short period of time. If the FFT’s are taken of small enough portions of data the frequencies will not have had time to change, these FFT’s can then be combined to see how the power spectrum of a signal changes over time. Time-frequency Analysis results are usually displayed in a spectrogram, which shows how the energy of a signal is distributed in the time-frequency domain. A spectrogram is an intensity graph with two independent variables: time and frequency. The x-axis is time, and the y-axis is frequency. The color intensity shows the power of the signal at the corresponding time and frequency.
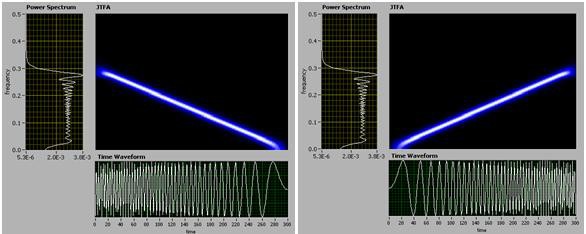
As a simple example, consider a constant amplitude sound measurement whose frequency changes over time. This chirp sound has a frequency that linearly changes with time. Similar to the transient impact of Figure 4, the FFT has trouble distinguishing between frequency and time. However, the spectrogram clearly shows how the frequency changes with time. If you recall we earlier examined two chirp signals with frequency analysis and noted that they produced the same power spectrum, making the two signals indistinguishable. If we instead use Time-Frequency Analysis of the signals we can see how they differ as demonstrated in Figure 8.
Figure 8. Joint Time-Frequency Analysis of a two chirp signals. One with frequency increasing over time (left) and the other with frequency decreasing over time (right).
Because time-frequency analysis represents a signal in the time-frequency domain, the results shown in the spectrogram reveal how the frequency components of a signal change over time. It can therefore be seen that Time-Frequency Analysis is suitable for analyzing time-varying signals.
Some signals might have a narrow frequency band and last for a short time duration. These signals can have a good concentration in the time-frequency domain. Noise signals usually are distributed in the entire time-frequency domain. So the time-frequency representation might be able to improve local signal-to-noise ratio in the time-frequency domain. That means you might recognize the existence of a signal that might not be recognized in another domain.
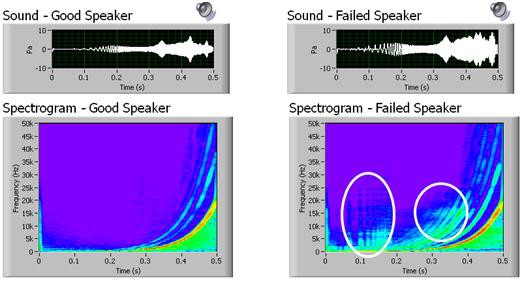
A common use case of Time-Frequency Analysis is production testing for speakers. In typical production testing, speakers typically play a log chirp from 10Hz to 20kHz. Operators listen to the speaker and judge the quality of the speakers.
You can use Time-Frequency analysis algorithms to analyze the sound generated by a speaker to automate a speaker quality test, replacing a “human” analyzer. In Figure 9, you can see the good speaker generates the expected frequency components (log-chirp) with the exception of a few harmonics and yields a “clean” spectrogram. Conversely, the spectrogram of the failed speaker contains many abnormal components.
Figure 9. Joint Time-Frequency Analysis of a bad speaker, with many abnormal components, compared to that of a good speak with a “clean” spectrogram
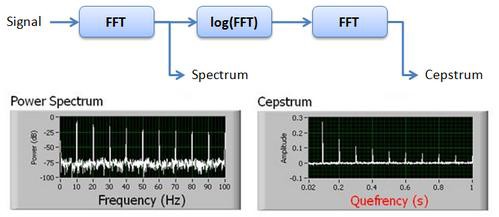
A Cepstrum Analysis, also called quefrency analysis, is the FFT of the log of a vibration spectrum. “Cepstrum” gets its name by reversing the first four letters of “spectrum”. The independent variable on the x-axis of an FFT or power spectrum is frequency. The independent variable of a cepstrum is called “quefrency”. The name quefrency is derived from frequency by replacing the first three letters of “frequency” with the second three letters of “frequency”.
Quefrency is a measure of time but not in the sense of time domain. While a frequency spectrum or FFT reveals the periodicity of a time domain measurement signal, the cepstrum reveals the periodicity of a spectrum. A cepstrum is often referred to as a spectrum of a spectrum. Figure 10 depicts the relationship between a spectrum and a cepstrum.
Figure 10. The relationship between a spectrum and a cepstrum.
Cepstrum Analysis is especially useful for detecting harmonics. Harmonics are periodic components in a frequency spectrum and are common in machine vibration spectra. With the cepstrum, it is possible to detect vibration harmonics such as those exhibited by a faulty roller bearing.
A roller element bearing is composed of an outer ring, an inner ring, and several roller element balls. When a failure develops in the outer or inner ring, the measured vibration signal will exhibit larger frequency energy around the fault frequency of the inner or outer race. These characteristic frequencies are related to the geometries of the bearing including the number of balls, size of races, and the rotational speed of the machine.
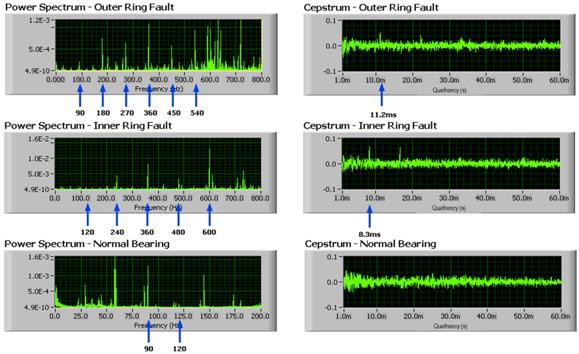
Figure 11 provides an example of bearing faults and cepstrum analysis. The power spectrum of the bearing vibration signal with an outer ring fault has a spectrum peak at 90Hz along with several harmonics. The power spectrum of the bearing vibration signal with an inner ring fault has a spectrum peak at 120Hz along with several harmonics. There is also a significant 90Hz peak in the power spectrum of a good bearing. In other words, it is not always possible to differentiate between good bearings and faulty bearings with a power spectrum alone. Looking at all three power spectrum in Figure 11, harmonics are visible, just not easily noted without the aid of additional analysis.
A cepstrum is a good way to detect harmonics in the spectrum. The cepstrum of the bearing with a fault in its outer ring has an obvious peak at 11.2ms corresponding to harmonics of 90Hz. The cepstrum of the bearing with a fault in its inner ring has an obvious peak at 8.3ms corresponding to 120Hz. The cepstrum of the good bearing does not have obvious peaks.
Figure 11. Power spectra and cepstrums of a bearing with an outer ring fault (top), an inner ring fault (middle), and a no fault (bottom)
Wavelet analysis is appropriate for characterizing machine vibration signatures with narrow band-width frequencies lasting for a short time period. For example, a cooling tower during a speed change may produce a transient vibration measurement signal from its bearings, footing, shaft or other mechanical components. Another area where wavelet analysis is used is testing and monitoring of low RPM gear boxes such as those in wind turbines and locomotives.
Wavelets are used as the reference in wavelet analysis and are defined as signals with two properties: admissibility and regularity. Admissibility means that a wavelet reference, or mother wavelet, must have a band-pass-limited spectrum. Admissibility also means that wavelets must have a zero average in the time domain which implies that wavelets must be oscillatory. Regularity means that wavelets have some smoothness and concentration in both the time and frequency domains, which means that wavelets are oscillatory and compact signals.
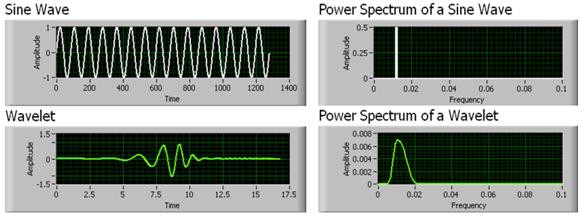
As comparison, sine waves oscillate along the time axis forever in time without any decay, which means they are not compact. In other words, sine waves do not have any concentration in the time domain. On the other hand, sine waves have extreme concentration in frequency domain. Sine waves have maximum resolution in frequency domain but no resolution in time domain.
Wavelets have limited bandwidth in the frequency domain and compact bandwidth in the time domain. So, wavelets have a good concentration and resolution trade-off between the time and frequency domain. Figure 12 depicts the differences between a sine wave and a wavelet in both time and frequency domains.
Figure 12. The frequency domain of a sine wave is very compact while the time domain is not. A wavelet is compact in both the time and frequency domain.
Wavelet Analysis then makes use of thousands of predefined wavelets. The vibration signal is then run through pattern matching algorithms which compares the signal to the known library of wavelets representing different phenomena such as knocks and spikes of different frequencies, amplitudes and durations. The pattern matching algorithms will then return a coefficient indicating the “goodness” of the match. A high coefficient indicates a good wavelet match and thus can be used to indicate a transient or noise impulse.
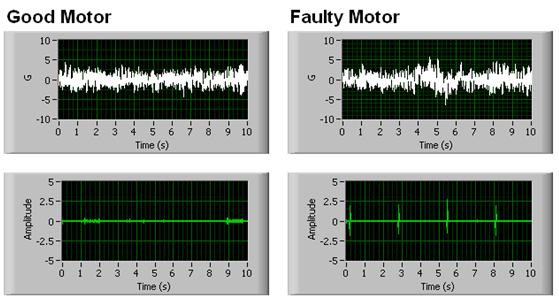
An example use of wavelets is the detection of engine knock in a diesel engine. Diesel engines can develop engine knock based on poor fuel, improper timing, or low engine compression. Engine knock can result in poor fuel efficiency, excessive engine vibration, or damage to the piston.
Measuring the combustion signature with an accelerometer or dynamic pressure transducer allows for examination of the combustion waveform. However, as engine knock is a non-stationary transient event, it is hard to distinguish in the time waveform or the typical FFT spectrum. However, the wavelet filter isolates the knock signature so that it is more easily detected in the time domain.
Figure 13 shows the time waveform of the diesel combustion cylinder of a normal engine and that of an engine with engine knock malfunctions. With the use of the wavelet filter, the engine knock is isolated and available in the time domain. Limits can then be used in the time domain to identify and count engine knocks. As the frequency of engine knocks increases, corrective action may be justified.
Figure 13. In the time domain the good motor is indistinguishable from the faulty motor, but using wavelet analysis the faults readily become apparent.
Wavelets are also finding use in monitoring of industrial gearbox such as those in helicopter or wind energy applications. Wavelets in these applications enhance the impact phenomena of cracked, broken, and missing gear teeth.
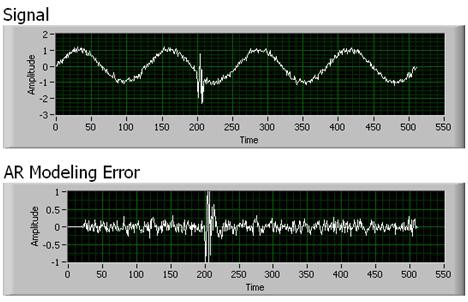
Model based analysis compares the vibration signal to a linear model of the signal and returns the error between the two which makes it useful for detecting transients. Autoregressive modeling analysis is the use of a linear model, the AR model. The AR model represents any sample in a time series as the combination of the past samples in the same time series. The linear combination ignores any noise and transients in the signal. When comparing a new measurement signal to the AR model, the modeling error corresponds to the noise and transients not recorded in the linear combination model.
Autoregressive Model analysis is useful for detecting transients in a machine vibration signal. Such transients can occur when a machine changes states, experiences variances in load, or begins to develop a fault vibration that is non-periodic. The difference between the current vibration measurement and the AR model, also known as the modeling error, indicates transient vibrations in the measured signal, Figure 14.
Figure 14. AR modeling error indicating transients in the original measured signal
This whitepaper describes in detail many different analysis techniques that can be performed for sound and vibration transducers. Since acquisition of acoustic and vibration signals is critical in a variety of industries, NI has combined industry-leading 24-bit dynamic signal acquisition hardware with ready-to-run analysis in NI LabVIEW software to provide a unique solution for prototyping and deploying sound and vibration analyzers. NI tools include ready-to-run examples that feature the flexibility of LabVIEW so you have the acoustic and vibration acquisition and analysis you need for your application.
By capturing dynamic measurements from operating machines such as vibration, electrical power, and dynamic pressure; it is possible to extract key component signature features. With this feature information, it is possible to tabulate specific metrics which drive plant maintenance and production schedules.
Component features are best extracted from sound and vibration signals when the appropriate signal analysis technique is used. By understanding the time-frequency characteristics of the raw signal, the algorithms that are most important can be identified. Figure 2, as listed earlier, provides a guideline to the selection of analysis methods for a range of time-frequency characteristics of the sound and vibration signature.